1.本发明涉及隧道施工领域,尤其是涉及一种用于盾构机的卷管机水管释放自动调节系统及方法。
背景技术:
2.隧道施工中的盾构机尾部水管主要是与竖井上方的蓄水池进行连接,在盾构机掘进时,水管里的水主要对盾构机的电气部件及刀盘驱动进行冷却、提供泡沫剂的水的来源以及用于给盾构机或隧道进行清洁等功能。
3.现有技术中,盾构机的水管卷管机主要是利用点对点的方式通过人工方式释放,水管长度释放过长或过短都会有一定的影响。例如。水管的释放不及时或过短可能会出现由于水管的拖拽出现水管外壁破裂或者连接处断开等隐患;水管的长度释放过多,会出现水管的层层叠压现象,在盾构机前进过程中,出现水管缠成一团等现象,不利于盾构机施工过程中的正常运行。
4.因此,利用盾构机前进过程中,卷管机根据盾构机的转速按需释放水管长度显得尤为重要。
技术实现要素:
5.本发明为了解决现有技术中存在的问题,创新提出了一种用于盾构机的卷管机水管释放自动调节系统及方法,可以根据盾构机的转速自动调节释放水管长度,有利于盾构机施工过程中的正常运行。
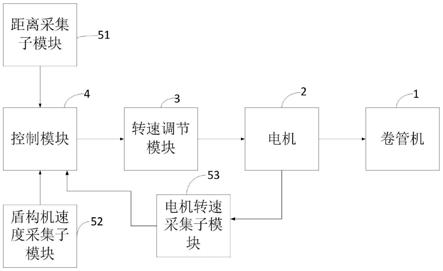
6.本发明第一方面提供了一种用于盾构机的卷管机水管释放自动调节系统,包括用于对盾构机水管进行卷动的卷管机,还包括:电机、电机转速调节模块、控制模块、参数采集模块,所述电机的输出端与卷管机的转速控制端连接,所述电机转速调节模块的输出端与电机的输入端连接,所述控制模块的参数输入端与参数采集模块的输出端连接,所述控制模块的控制输出端与电机转速调节模块输入端连接,用于获取参数采集模块采集的位置信息、盾构机推进速度信息,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息,并将确定的电机理论转速信息发送至电机转速调节模块进行电机转速调节。
7.可选地,所述参数采集模块包括距离采集子模块、盾构机速度采集子模块,所述距离采集子模块设置于卷管机的顶部,用于分别获取卷管机最外侧水管至距离采集子模块的第一采集距离,以及卷管机圆心至距离采集子模块的第二采集距离,所述距离采集子模块的输出端与控制模块的第一参数输入端连接;所述盾构机速度采集子模块的输入端与盾构机通信连接,用于获取盾构机的推进速度,所述盾构机速度采集子模块的输出端与控制模块的第二参数输入端连接。
8.进一步地,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息具体是:
9.其中,n1为电机理论转速信息,v1为盾构机推进速度信息,r为卷管机最外侧水管至卷管机圆心的距离。
10.可选地,所述参数采集模块还包括电机转速采集子模块,所述电机转速采集子模块与电机通信连接,用于获取电机实际转速信息,所述电机转速采集子模块的输出端与控制模块的第三参数输入端连接。
11.进一步地,控制模块还包括模糊控制器,所述模糊控制器根据电机理论转速信息以及电机实际转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机理论转速信息发送至电机转速调节模块进行电机转速调节。
12.可选地,还包括:支撑模块,所述支撑模块设置于卷管机底部,与卷管机固定连接,与卷管机固定连接,实现对卷管机的支撑。
13.可选地,还包括固定模块,所述固定模块设置于支撑模块上部,用于将距离采集子模块与支撑模块固定连接。
14.本发明第二方面还提供了一种用于盾构机的卷管机水管释放自动调节方法,基于本发明第一方面一种用于盾构机的卷管机水管释放自动调节系统的基础上实现的,包括:
15.控制模块获取参数采集模块分别采集的位置信息、盾构机推进速度信息;
16.控制模块根据采集的位置信息、盾构机推进速度信息确定电机的理论转速信息。
17.可选地,控制模块根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息具体是:
18.其中,n1为电机理论转速信息,v1为盾构机推进速度信息,r为卷管机最外侧水管至卷管机圆心的距离。
19.可选地,还包括:
20.控制模块根据电机实际转速信息以及电机的理论转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机新的转速信息发送至电机转速调节模块进行电机转速调节。
21.本发明采用的技术方案包括以下技术效果:
22.1、本发明技术方案控制模块通过获取参数采集模块采集的位置信息、盾构机推进速度信息,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息,并根据计算的电机转速控制调节释放水管长度,使得卷管机行程与盾构机推进位移保持一致,有利于盾构机施工过程中的正常运行,避免造成水管的过多或过少释放导致水管的挤压与拖拽现象。
23.2、本发明技术方案中控制模块通过电机转速调节模块控制电机转速调节卷管机长度,可以大大减少工人的工作量,实现水管的自动释放,实现自动化控制。
24.3、本发明技术方案中,所述参数采集模块还包括用于获取电机实际转速信息的电机转速采集子模块,便于控制模块及时获取电机实际转速信息。
25.4、本发明技术方案中控制模块还包括模糊控制器,根据电机理论转速信息以及电机实际转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机理论转速信息发送至电机转速调节模块进行电机转速调节,进一步地提高了电机转速控制的准确性以及可
靠性。
26.5、本发明技术方案中,还包括:设置于卷管机的底部的支撑模块,与卷管机固定连接,实现对卷管机的支撑。
27.6、本发明技术方案中还包括固定模块,固定模块设置于支撑模块上部,用于将距离采集子模块与支撑模块固定连接。
28.应当理解的是以上的一般描述以及后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
29.为了更清楚说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单介绍,显而易见的,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.图1为本发明方案中实施例一机械结构示意图;
31.图2为本发明方案中实施例一通信结构示意图;
32.图3为本发明方案中实施例一中模糊化控制的流程示意图;
33.图4为本发明方案中实施例一中输入变量对应的隶属度函数示意图;
34.图5为本发明方案中实施例一中输出变量对应的隶属度函数示意图;
35.图6为本发明方案中实施例二中方法的一流程示意图;
36.图7为本发明方案中实施例二中方法的另一流程示意图。
具体实施方式
37.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。下文的公开提供了许多不同的实施例或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。此外,本发明可以在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。应当注意,在附图中所图示的部件不一定按比例绘制。本发明省略了对公知组件和处理技术及工艺的描述以避免不必要地限制本发明。
38.实施例一
39.如图1-图2所示,本发明提供了一种用于盾构机的卷管机水管释放自动调节系统,包括用于对盾构机水管进行卷动(卷管)的卷管机1,还包括:电机2、电机转速调节模块3、控制模块4、参数采集模块5,电机2的输出端与用于卷管机1的转速控制端连接,电机转速调节模块3的输出端与电机2的输入端连接,控制模块4的参数输入端与参数采集模块5的输出端连接,用于获取参数采集模块5采集的位置信息、盾构机推进速度信息,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息,并将确定的电机理论转速信息发送至电机转速调节模块3进行电机2转速调节。
40.其中,参数采集模块5包括距离采集子模块51、盾构机速度采集子模块52,距离采集子模块51固定设置于盾构机的顶部,用于分别获取卷管机1最外侧水管至距离采集子模块51的第一采集距离,以及卷管机1圆心至距离采集子模块51的第二采集距离,距离采集子模块51的输出端与控制模块4的第一参数输入端连接;盾构机速度采集模块52的输入端与
盾构机通信连接,用于获取盾构机的推进速度,盾构机速度采集模块52的输出端与控制模块4的第二参数输入端连接。
41.具体地,距离采集子模块51可以为测距传感器,测距传感器具体可以是红外测距传感器,也可以是超声波测距传感器,只要可以实现测量获取测距传感器分别至卷管机1最外侧水管以及卷管机1圆心的距离即可;具体地,测距传感器测得距离卷管机1水管外围的距离为h1,测距传感器至卷管机1圆心位置的距离为h2,利用h2-h1可得到当前水管外围至卷管机的圆心距离r,r随着水管释放的变化而变化;盾构机速度采集模块可以为速度传感器。
42.根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息具体是:
43.其中,n1为电机理论转速信息,v1为盾构机推进速度信息,r为卷管机最外侧水管至卷管机圆心的距离。具体地,当前水管外围至卷管机的圆心距离r与盾构机的推进速度v1和电机转速n之间的关系为n=v1/2πr(假设卷管机的每一圆周都是做匀速圆周运动,由公式ω=2πn及v=ωr可知v=2πrn。令盾构机推进速度为v1,由于卷管机1行程与盾构机推进位移保持一致,那么n=v1/2πr。当盾构机停止推进时,此时卷管机的电机停止运行。通过利用控制模块4获取速度传感器以及测距传感器读取盾构机推进速度v1的值、当前水管外围至卷管机的圆心距离r,依据公式n=v1/2πr得到此时电机应有的转速),控制模块4根据传输的盾构机推进速度v1的值、当前水管外围至卷管机的圆心距离r,计算电机2当前的转速。计算后,控制模块4将计算电机理论转速结果发送至转速调节模块3,从而调节电机2的转速,达到调节卷管机1水管长度的目的。
44.控制模块4可以为plc(programmable logic controller,可编程逻辑控制器),其型号可以是西门子s1200。电机转速调节模块3可以为变频器,其型号可选用西门子g120。
45.具体地,plc可以通过profibus-dp(一种过程现场总线)通讯协议实现电机的转速控制,利用profibus(一种过程现场总线)网络通信协议传输状态字控制变频器的频率,以控制电机的转速,在相同时间内进而达到卷管机释放水管的行程与盾构机的位移保持一致,实现卷管机有目的的释放水管,做到用多少释放多少,避免造成水管的过多或过少释放导致水管的挤压与拖拽现象。还包括固定模块,所述固定模块设置于盾构机顶部,用于固定距离采集子模块。
46.进一步地,参数采集模块5还包括电机转速采集子模块53,电机转速采集子模块53与电机2通信连接,用于获取电机2实际转速信息,电机转速采集子模块53的输出端与控制模块4的第三参数输入端连接。具体地,电机转速采集子模块53可以通过旋转编码器实现,也可以通过其他方式实现,只要能够获取电机转速即可,本发明在此不做限制。
47.控制模块4还包括模糊控制器41,模糊控制器41根据电机理论转速信息以及电机实际转速信息通过模糊推理,确定电机1新的转速信息,并将确定的电机理论转速信息发送至电机转速调节模块3进行电机转速调节。
48.具体地,如图3所示,控制模块4(plc)读取盾构机的推进速度v1后,利用控制模块4得到电机理论转速n,利用无级变速实现这一功能。在无级变速过程中,模糊控制器41具有处理速度快,精度高的优点。plc通过旋转编码器3采样获取电机实际转速信息,然后将此值与电机理论转速n进行比较,得到电机实际转速信息与电机理论转速n之间的误差信号e和
误差变化率ec,把误差和误差变化率的精确量模糊化为模糊量e、ec。经过模糊推理得到模糊控制量u,进行模糊计算最终得到模糊控制量u的精确值u,即电机新的转速信息。模糊控制是指以模糊合论、模糊语言变量和模糊逻辑推理为基础的计算机智能控制。根据人工控制规则组织控制决策表,由决策表决定控制量的大小,其核心是利用模糊集合论把人的控制策略的自然语言转化为计算机能够接受的算法语言所描述的算法。具体地,模糊控制器包括四部分:1、模糊化,主要作用是选定模糊控制器的输入量,并将其转换为模糊控制器系统可识别的模糊量,其主要包含以下内容:(1)对输入量进行满足模糊控制需求的处理;(2)对输入量进行尺度变换;(3)确定各输入量的模糊语言取值和相应的隶属度函数。目前,隶属度函数的确定方法主要有专家经验、数理统计法、对比排序法等。但是,隶属函数的选择至今没有一种合适的方法能够准确的进行确定,而且利用不同方法来确定的隶属度函数还是会存在不一致性。例如,误差信号e和误差变化率ec的论域取值可以均为-5到 5,对应的隶属度函数均为三角形隶属度函数,如图4所示,语言变量值取五种,分别为“正大(pb)”、“正小(ps)”、“零(ze)”、“负小(ns)”、“负大(nb)”,输出变量(模糊控制量u的精确值u)对应的隶属度函数为单点脉冲增量函数,语言变量值取五种,分别为“正大(pb)”、“正小(ps)”、“零(ze)”、“负小(ns)”、“负大(nb)”隶属度函数如图5所示,2、规则库,根据人类专家的经验建立模糊规则库。模糊规则库包含众多控制规则,是从实际控制经验过渡到模糊控制器的关键步骤。规则库中的控制规则如下所示:(1)ife=nb andδe=nb then u=pb;(2)ife=nb andδe=ns then u=pb;依次类推,本发明在此不做赘述。3、模糊推理,主要实现基于知识的推理决策。4、解模糊,主要作用是将推理得到的控制量转化为控制输出;通过以上内容对电机转速实现无极变速控制。
49.优选地,用于盾构机的卷管机水管释放自动调节系统还包括固定模块6、支撑模块7,支撑模块7设置于卷管机1的底部,与卷管机1固定连接,实现对卷管机1的支撑,具体地,支撑模块7的第一支撑端以及第二支撑端可以与卷管机1的中心轴固定连接(例如焊接),实现对卷管机1的支撑;固定模块6设置于支撑模块7上部,用于将距离采集子模块51与支撑模块7固定连接;固定模块6可以是螺栓,也可以是粘贴剂,只要能够实现距离采集子模块51与支撑模块7的固定连接即可。
50.本发明技术方案控制模块通过获取参数采集模块采集的位置信息、盾构机推进速度信息,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息,并根据计算的电机转速控制调节释放水管长度,使得卷管机行程与盾构机推进位移保持一致,有利于盾构机施工过程中的正常运行,避免造成水管的过多或过少释放导致水管的挤压与拖拽现象。
51.本发明技术方案中控制模块通过电机转速调节模块控制电机转速调节卷管机长度,可以大大减少工人的工作量,实现水管的自动释放,实现自动化控制。
52.本发明技术方案中,所述参数采集模块还包括用于获取电机实际转速信息的电机转速采集子模块,便于控制模块及时获取电机实际转速信息。
53.本发明技术方案中控制模块还包括模糊控制器,根据电机理论转速信息以及电机实际转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机理论转速信息发送至电机转速调节模块进行电机转速调节,进一步地提高了电机转速控制的准确性以及可靠性。
54.本发明技术方案中,还包括:设置于卷管机的底部的支撑模块,与卷管机固定连接,实现对卷管机的支撑。
55.本发明技术方案中还包括固定模块,固定模块设置于支撑模块上部,用于将距离采集子模块与支撑模块固定连接。
56.实施例二
57.如图6所示,本发明技术方案还提供了一种用于盾构机的卷管机水管释放自动调节方法,基于实施例一中的一种用于盾构机的卷管机水管释放自动调节系统的基础上实现的,包括:
58.s1,控制模块获取参数采集模块分别采集的位置信息、盾构机推进速度信息;
59.s2,控制模块根据采集的位置信息、盾构机推进速度信息确定电机的理论转速信息。
60.具体地,控制模块根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息具体是:
61.其中,n1为电机理论转速信息,v1为盾构机推进速度信息,r为卷管机最外侧水管至卷管机圆心的距离。
62.进一步地,如图7所示,本发明技术方案提供的一种用于盾构机的卷管机水管释放自动调节方法,还包括:
63.s3,控制模块根据电机实际转速信息以及电机的理论转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机新的转速信息发送至电机转速调节模块进行电机转速调节。
64.本发明技术方案控制模块通过获取参数采集模块采集的位置信息、盾构机推进速度信息,根据采集的位置信息、盾构机推进速度信息确定电机理论转速信息,并根据计算的电机转速控制调节释放水管长度,使得卷管机行程与盾构机推进位移保持一致,有利于盾构机施工过程中的正常运行,避免造成水管的过多或过少释放导致水管的挤压与拖拽现象,可以大大减少工人的工作量,实现水管的自动释放,实现自动化控制。
65.本发明技术方案中控制模块还包括模糊控制器,根据电机理论转速信息以及电机实际转速信息通过模糊推理,确定电机新的转速信息,并将确定的电机理论转速信息发送至电机转速调节模块进行电机转速调节,进一步地提高了电机转速控制的准确性以及可靠性。
66.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。