基于专家内模控制的串级回路pid控制器参数整定方法
技术领域
1.本发明涉及pid控制技术领域,具体涉及一种基于专家内模控制的串级回路pid控制器参数整定方法。
背景技术:
2.在工业流程过程控制中,比例积分微分(pid)控制策略是目前最常见也是应用最广泛的。由于pid控制结构简单、易于实现、稳定性好,故90%以上的自动控制回路均采用该种控制策略。其中,pid控制参数的选取对于回路的性能有着极大的影响,好的参数能够保证工业流程的平稳运行,而不当的参数则可能使回路产生振荡,甚至发散,从而影响工业生产过程,因此pid参数的整定在流程控制中是一个至关重要的步骤。
3.而串级回路由于具有较好的抗干扰能力,且适用于时间常数和滞后大、负荷变化大的被控对象,因而在工业流程中占据了很大的比例。串级回路包含主回路(外环)和副回路(内环),通过两个串联的控制器构成双闭环控制。主回路控制器的输出作为副回路的设定值,通过副回路对干扰进行超前调节,提高主回路的控制质量,满足工业现场的许多工艺需求。
4.但是,当工业现场处于开工阶段,需要将串级回路从手动状态打上串级,或者当工业现场因为某些原因使得生产工况发生变化时,原来的pid控制器参数不再适用当前的串级回路,为了使回路的控制性能符合预期的效果,都须进行串级回路pid控制器参数的整定。对于上述的第一种情况,需要先整定副回路的pid参数,待副回路达到合适的控制性能时,再打上串级,整定主回路的pid参数;针对第二种情况,通常在串级回路的整定过程中,需要先切断串级连接,整定副回路,再整定主回路。因此,对于温度、液位等慢过程,串级回路的整定过程会耗费工程人员大量的时间,效率较低,且工况的切换也会影响生产效率。
5.申请号为2020114003231的中国专利公开了基于闭环阶跃响应串级回路pid控制参数自校正方法,该专利所提出的串级回路整定方法是基于采集的闭环阶跃响应数据,进行离线操作得到整定后的控制器参数值,并用直接分析设计原理对副控制器参数进行校正,该方法仅适用于投上自动的串级回路,但不适用于未投自动的串级回路,即不适用于处于手动状态下的串级回路,方法适用情况较单一。
6.申请号为2018114485010的中国专利公开了一种基于新型二自由度内模pid的加热炉温度控制方法,该专利主要针对加热炉的温度进行控制,采用了改进的二自由度内模控制结构进行控制器的设计和整定,其适用对象不具有普适性,且只是单回路的pid控制器参数整定。
7.张井岗,李临生于2002年发表的一种二自由度内模控制方法,其采用二自由度内模控制器控制典型的工业过程控制对象,方法可以使系统具有良好的目标跟踪性、干扰抑制性和鲁棒性,改进了常规内模控制的不足,但是在工业现场通常都采用pid控制器,方法虽好但不具有普及的条件。
技术实现要素:
8.本发明为了克服以上技术的不足,提供了一种基于专家内模控制的串级回路pid控制器参数整定方法。
9.本发明的方法,无论是开环的数据还是闭环的数据,只要回路数据具有一定程度的激励,即可进行串级回路的pid控制器参数整定。且本发明适用于大部分串级回路,具有普适性。本发明采用基于专家内模控制的串级回路pid控制器参数整定方法,具体是在副回路采用基于专家经验的内模控制进行pi控制器参数的整定,在主回路采用基于专家经验的二自由度内模控制进行pid控制器参数的整定。通过该方法使得在不改变串级回路采用pid控制器的前提下,实现了和专家内模控制等效的控制效果,可以同时满足串级回路控制的鲁棒性和跟踪性要求。
10.术语解释:
11.1、pid控制器:pid(比例-积分-微分)控制器是工业控制应用中常见的一类控制器,其主要参数包括比例k、积分时间ti和微分时间td。
12.2、内模控制(internal model control,简称imc):是一种基于过程数学模型进行控制器设计的新型控制策略。
13.本发明克服其技术问题所采用的技术方案是:
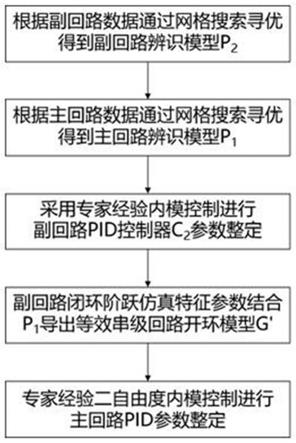
14.一种基于专家内模控制的串级回路pid控制器参数整定方法,串级回路包括主回路和副回路,至少包括:
15.利用串级回路的数据,采用网格化搜索寻优,得到主副回路的辨识模型;
16.采用基于专家经验的内模控制方法,进行副回路控制器参数的整定;
17.通过副回路闭环阶跃仿真特征参数与主回路的辨识模型,推出等效串级回路开环模型;
18.采用基于专家经验的二自由度内模控制方法,进行主回路控制器参数的整定。
19.进一步地,利用串级回路的数据,采用网格化搜索寻优,得到主副回路的辨识模型,包括如下过程:
20.建立主副回路的过程模型;
21.对于主副回路的过程模型中待辨识的模型参数,进行动态分割并构成网络;
22.通过网格遍历,寻找最优的辨识模型参数,得到主副回路的辨识模型。
23.进一步地,用基于专家经验的内模控制方法,进行副回路控制器参数的整定,包括如下过程:
24.设计基于专家经验的副回路内模控制器:对副回路的内部过程模型进行分解;对副回路控制器进行确定,得到副回路内模控制器;
25.进行副回路控制器参数的整定:根据副回路内模控制器和副回路控制器的等价关系,得到副回路控制器的参数。
26.进一步地,通过副回路闭环阶跃仿真特征参数与主回路的辨识模型,推出等效串级回路开环模型,包括如下过程:
27.根据副回路控制器和副回路辨识模型,进行副回路的闭环阶跃响应仿真,得到副回路的闭环近似模型特征参数,包括静态增益和上升时间;
28.结合主回路的辨识模型,进行串级回路近似模型转换。
29.进一步地,采用基于专家经验的二自由度内模控制方法,进行主回路控制器参数的整定,包括如下过程:
30.设计基于专家经验二自由度的主回路内模控制器:对主回路的内部过程模型进行分解;对主回路控制器进行确定,得到主回路内模控制器;
31.进行主回路控制器参数的整定:根据主回路内模控制器和主回路控制器的等价关系,得到主回路控制器的参数。
32.进一步地,利用串级回路的数据,采用网格化搜索寻优,得到主副回路的辨识模型,具体包括:
33.通过二阶加时滞模型,将过程模型p表示为:
[0034][0035]
上式中,s为拉普拉斯算子;k为模型增益;t1为时间常数1;t2为时间常数2,当t2=0时,此过程模型为一阶模型;τ为时滞时间;
[0036]
需要说明的是:本发明中,p代表用于辨识的过程模型,m代表内部过程模型,两者实际上都是过程模型,其对应的模型是一样的,是为了在不同计算阶段做区分使用;p在辨识前称为过程模型,辨识后成为辨识模型,m称为内部过程模型。
[0037]
对于待辨识的模型参数,设定上下限范围,在设定的上下限范围内进行动态分割并构成网格,再进行网格遍历以寻找最优的辨识模型参数,从而实现模型辨识的过程;
[0038]
在第i(i=1,2,3,...,n)次网格计算中,给定时滞时间τi、时间常数t
1i
和t
2i
,求出最优的模型增益ki;在每个网格对应的参数下,计算辨识模型输出和真实输出的误差,寻找误差最小的网格参数和模型增益作为最优模型参数;
[0039]
对于给定的时滞时间τ、时间常数t1和t2,其优化函数表示为:
[0040][0041]
上式中,y
p
为过程真实输出,ym为辨识模型输出,为根据已知条件得到的无增益模型输出;
[0042]
令:
[0043][0044]
由此得到最优增益k
opt
:
[0045][0046]
据此得到主副回路的辨识模型;
[0047]
副回路的辨识模型为:
[0048][0049]
上式中,k2为副回路的模型增益;t
21
为副回路的时间常数1;t
22
为副回路的时间常数2,τ2为副回路的时滞时间;
[0050]
主回路的辨识模型为:
[0051][0052]
上式中,k1为主回路的模型增益;t
11
为主回路的时间常数1;t
12
为主回路的时间常数2,τ1为主回路的时滞时间。
[0053]
进一步地,采用基于专家经验的内模控制方法,进行副回路控制器参数的整定,具体包括:
[0054]
基于副回路的跟随性要求,设副回路采用pi控制器,则副回路控制器的结构为:
[0055][0056]
上式中,k
p2
为副回路控制器的比例系数,t
i2
为副回路控制器的积分时间;
[0057]
当副回路控制器c2和副回路内模控制器c
2*
满足以下关系时,副回路内模控制器c
2*
下的副回路控制效果与副回路控制器c2下的副回路控制效果是等价的;
[0058][0059]
首先,设计基于专家经验的副回路内模控制器:
[0060]
1)对副回路的内部过程模型m2进行分解:
[0061]
m2=m
2 m2-[0062]
上式中,m
2
包含所有纯滞后环节和s平面右半边的零点(所述s平面,是指通过拉普拉斯变换,将时域函数变换到复频域中,并分别以实轴、虚轴为横纵坐标轴组成的平面,通过分析零、极点在s平面的分布情况可判断系统稳定性,s平面右半边的零点可能会导致系统不稳定),并设其稳态增益为1;
[0063]
则此处,m
2
和m
2-分别为:
[0064][0065][0066]
2)对副回路控制器进行确定:
[0067]
在副回路控制器中,增加一个低通滤波器f2:
[0068][0069]
上式中,λ2为低通滤波器f2的时间常数,m为正整数;
[0070]
则副回路控制器c
2*
为:
[0071][0072]
通过专家经验,结合副回路的内部过程模型m2中的时间常数和时滞时间与时间常数的比值,给定λ2的数值;其主要调节原理为:当模型时间常数较大时(即慢过程),调小λ2;当模型时间常数较小时(快过程),调大λ2;当模型时滞时间与时间常数的比值较大时(即大时滞过程),适当调小λ2;当模型时滞时间与时间常数的比值较小时(即小时滞或无时滞过
程),适当调大λ2。
[0073]
然后,进行副回路控制器参数的整定:根据副回路内模控制器c
2*
和副回路控制器c2的等价关系,得出副回路控制器的参数为:
[0074]
当副回路的时滞时间τ2≥0.5(t
21
t
22
)时,采用一阶派德近似:
[0075][0076]
副回路控制器的参数为:
[0077][0078]
当时滞时间τ2<0.5(t
21
t
22
)时,采用一阶泰勒近似:
[0079][0080]
副回路控制器的参数为:
[0081][0082]
进一步地,通过副回路闭环阶跃仿真特征参数与主回路的辨识模型,推出等效串级回路开环模型,具体包括:
[0083]
根据副回路控制器和副回路辨识模型,进行副回路的闭环阶跃响应仿真,提取闭环响应的特性参数,得到副回路的闭环近似模型:
[0084][0085]
t2=tr/2.2
[0086]
上式中,a2为副回路闭环响应静态增益,t2为副回路闭环时间常数,tr为副回路闭环响应上升时间;
[0087]
一阶系统的单位阶跃响应为:
[0088]
c(t)=1-e-t/t
[0089]
上式中,t为一阶系统的时间常数;
[0090]
副回路闭环响应上升时间tr定义为从阶跃响应终值的10%上升到终值90%所需的时间;
[0091]
据此计算得到:
[0092]
tr=2.20t
[0093]
结合主回路的辨识模型,进行串级回路近似模型转换,如下:
[0094]
将串级回路模型等效为二阶滞后模型:
[0095][0096]
当主回路为比例模型时:串级回路等效增益k1等于主回路模型p1的增益k1和副回路闭环响应静态增益a2的乘积:
[0097]
k=k1·
a2[0098]
串级回路等效时间常数计算如下:
[0099]
t1=t2[0100]
t2=0
[0101]
串级回路等效时滞时间等于主副回路时滞时间之和:
[0102]
τ=τ1 τ2[0103]
当主回路为一阶模型时:串级回路等效增益k等于主回路的模型增益k1和副回路闭环响应静态增益a2的乘积:
[0104]
k=k1·
a2[0105]
串级回路等效时间常数计算如下:
[0106]
t1=max{t
11
,t2}
[0107]
t2=min{t
11
,t2}
[0108]
串级回路等效时滞时间等于主回路的时滞时间与副回路的时滞时间之和:
[0109]
τ=τ1 τ2[0110]
当主回路为二阶模型时:串级回路等效增益k等于主回路的模型增益k1和副回路闭环响应静态增益a2的乘积:
[0111]
k=k1·
a2[0112]
串级回路等效时间常数t1和t2为主回路的两个时间常数t
11
、t
12
和副回路的闭环时间常数t2之中,三者取较大的两个;
[0113]
串级回路等效时滞时间等于主回路的时滞时间与副回路的时滞时间之和:
[0114]
τ=τ1 τ2。
[0115]
进一步地,采用基于专家经验的二自由度内模控制方法,进行主回路控制器参数的整定,具体包括:
[0116]
设主回路采用pid控制器,则主回路控制器的结构为:
[0117][0118]
上式中,k
p1
为主回路控制器的比例系数,t
i1
为主回路控制器的积分时间,t
d1
为主回路控制器的微分时间;
[0119]
当主回路控制器c1和主回路内模控制器c
1*
满足以下关系时,主回路内模控制器c
1*
下的串级回路控制效果与主回路控制器c1下的串级回路控制效果是等价的;
[0120][0121]
首先,设计基于专家经验二自由度的主回路内模控制器:
[0122]
1)对主回路的内部过程模型m1进行分解:
[0123]
m1=m
1 m1-[0124]
上式中,m
1
包含所有纯滞后环节和s平面右半边的零点,并设其稳态增益为1;
[0125]
则此处,m
1
和m
1-分别为:
[0126]m1
=e-τs
[0127][0128]
2)对主回路控制器进行确定:
[0129]
在主回路控制器中,增加一个低通滤波器f1:
[0130][0131]
上式中,λ1为低通滤波器f1的时间常数;n为正整数;
[0132]
则主回路控制器c
1*
为:
[0133][0134]
为了使串级回路的鲁棒性和跟踪性能够独立调整,设计滤波控制器f1为:
[0135][0136]
其中,f滤波器为:
[0137][0138]
上式中,λ为f滤波器的时间常数;r为正整数;
[0139]
通过专家经验,结合主回路的内部过程模型m1中的时间常数和时滞时间与时间常数的比值,给定λ1和λ的数值;其主要调节原理为:当模型时间常数较大时(即慢过程),调小λ1和λ;当模型时间常数较小时(快过程),调大λ1和λ;当模型时滞时间与时间常数的比值较大时(即大时滞过程),适当调小λ1和λ;当模型时滞时间与时间常数的比值较小时(即小时滞或无时滞过程),适当调大λ1和λ。
[0140]
然后,进行主回路控制器参数的整定:根据主回路内模控制器c
1*
和主回路控制器c1的等价关系,得出主回路控制器的参数:
[0141]
当时滞时间τ≥0.5(t1 t2)时,采用一阶派德近似:
[0142][0143]
主回路控制器的参数为:
[0144][0145]
当时滞时间τ<0.5(t1 t2)时,采用一阶泰勒近似:
[0146]
e-τs
≈1-τs
[0147]
主回路控制器的参数为:
[0148][0149]
本发明的有益效果是:
[0150]
1、本发明采用开环或闭环任意状态下的具有激励的串级回路数据进行整定,应用场景更广泛。
[0151]
2、本发明提出的串级回路整定方法具有普遍适用性,通过副回路闭环阶跃仿真的特征参数结合主回路模型得到的等效串级回路开环模型在保证等效模型的稳定性的同时,降低了模型的复杂度,方便运算。
[0152]
3、采用基于专家经验的内模整定和二自由度内模整定方法通过模型参数结合专家经验调整滤波器时间常数,避免了用户手动调整该项参数,提高了用户易用度。
[0153]
4、本发明提出的基于专家经验二自由度内模控制的串级回路pid控制器参数整定方法适用于串级回路的参数整定,无需改变当前工况,即可同时得到主副回路的pid控制器整定参数,整定效率高。
附图说明
[0154]
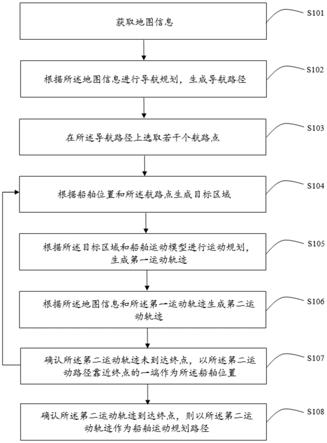
图1为本发明所述的基于专家内模控制的串级回路pid控制器参数整定方法的流程图。
[0155]
图2为本发明所述的基于专家内模控制的串级回路pid控制器参数整定方法的原理示意图。
[0156]
图3为本发明所述的基于专家经验二自由度内模的串级回路pid控制器参数整定的控制框图。
[0157]
图4为与图3等效的串级回路控制框图。
[0158]
图5为整定前串级回路主副回路的趋势图,其中,图5(a)为整定前主回路温度设定值sv1和主回路温度测量值pv1的趋势图,图5(b)为整定前主回路控制器输出op1的趋势图,图5(c)为整定前副回路流量设定值sv2和副回路流量测量值pv2的趋势图,图5(d)为整定前副回路控制器输出op1的趋势图。
[0159]
图6为串级回路副回路闭环阶跃响应曲线。
[0160]
图7为应用本发明基于专家内模控制的串级回路pid控制器参数整定方法整定后的串级回路主副回路的趋势图,其中,图7(a)为整定后主回路温度设定值sv1和主回路温度测量值pv1的趋势图,图7(b)为整定后主回路控制器输出op1的趋势图,图7(c)为整定后副回路流量设定值sv2和副回路流量测量值pv2的趋势图,图7(d)为整定后副回路控制器输出op1的趋势图。
具体实施方式
[0161]
为了便于本领域人员更好的理解本发明,下面结合附图和具体实施例对本发明做进一步详细说明,下述仅是示例性的不限定本发明的保护范围。
[0162]
下面通过一个具体实例脱碳九塔中的一个串级回路为例展开对本发明所述的基于专家内模控制的串级回路pid控制器参数整定方法进行详细说明:
[0163]
主回路对塔下部温度进行调节,副回路对再沸器入口处过热蒸汽的进口流量进行调节。如图2所示,本实施例所述的串级回路中,c1为主回路的pid控制器,p1为主回路的辨识模型,c2为副回路的pid控制器,p2为副回路的辨识模型,sv1为主回路的塔下部温度设定值,sv2为副回路的进口流量设定值,op1为主回路控制器的输出值,op2为副回路控制器的输出值,pv1为主回路塔下部温度的测量值,pv2为副回路进口流量的测量值。副回路的设定值sv2等于主回路控制器的输出值op1。pv1的量程为[0,200℃],op1的量程为[0,10000t/h],pv2的量程为[0,10000t/h],op2的量程为[0,100%]。
[0164]
该串级回路的趋势线如图5所示,其中,图5(a)为整定前主回路温度设定值sv1和主回路温度测量值pv1的趋势图,图5(b)为整定前主回路控制器输出op1的趋势图,图5(c)为整定前副回路流量设定值sv2和副回路流量测量值pv2的趋势图,图5(d)为整定前副回路控制器输出op1的趋势图。从该组趋势图中可知,整定前该串级回路的副回路阀门的平稳性较差,存在频繁的振荡,容易降低阀门使用寿命;过快的响应速度,使副回路流量存在微小的超调;且主回路的温度控制存在一定的超调,不符合工艺上需要温度控制平稳的要求。基于这样的背景,下面展开对该串级回路的pid参数整定。
[0165]
对主副回路均采用一阶模型进行辨识,其模型形式为:
[0166]
主回路辨识模型:
[0167][0168]
副回路辨识模型:
[0169][0170]
通过前述的网格遍历寻优,得到的主副回路的模型参数分别为:
[0171]
主回路模型辨识参数:
[0172]
k1=0.017,t
11
=5.96min,τ1=1min
[0173]
副回路模型辨识参数:
[0174]
k2=97.13,t
21
=0.54min
[0175]
首先根据专家经验内模控制整定副回路的pid控制器c2的参数。对于副回路,通过内部过程模型m2和控制器输出op2,可以得到模型响应pv
2*
。真实的响应pv2与模型响应pv2*的差pv2﹣pv2*作为内模控制器c2*的反馈输入信号。通常,由于存在模型误差m2≠g2和未被考虑在模型中的未知扰动d2,因此pv2≠pv
2*
。在这个过程中,通过专家经验,依据内部过程模型m2对c
2*
中的参数进行调节。
[0176]
基于副回路的跟随性要求,副回路考虑采用pi控制器:
[0177][0178]
可以发现,当c2和c
2*
满足以下关系时,图3和图4的副回路的框图是等价的。
[0179][0180]
下面设计基于专家经验的副回路内模控制器:
[0181]
首先对副回路内部过程模型进行分解:
[0182]
m2=m
2 m2-[0183]m2
=1
[0184][0185]
然后对副回路控制器进行确定:
[0186]
为了增加控制器的鲁棒性,加入一个低通滤波器f2:
[0187][0188]
其中,时间常数初始值取λ2=3(t
21
τ2)=97.2。
[0189]
据此设计副回路控制器为:
[0190][0191]
滤波器的时间常数λ2的取值通过专家经验,结合内部过程模型m2中的时间常数和时滞时间与时间常数的比值的不同给定合适的值。本实施例中,对λ2的具体调节如表1和表2所示。
[0192]
表1流量回路的过程响应速度与λ2调节量之间的关系
[0193]
流量回路慢较慢中较快快λ2调节量-0.8(t
21
τ2)-0.4(t
21
τ2)00.4(t
21
τ2)0.8(t
21
τ2)
[0194]
表2流量回路的时滞程度与λ2调节量之间的关系
[0195]
流量回路无时滞小时滞较大时滞大时滞λ2调节量0.2(t1 τ)0.1(t1 τ)-0.1(t1 τ)-0.2(t1 τ)
[0196]
本实施例所述的该流量回路作为副回路,属于较慢过程,无时滞,根据上表调节得到最终的λ2=90.68。
[0197]
根据等价关系,采用一阶泰勒近似导出pi控制器参数为:
[0198][0199]
根据副回路控制器和副回路辨识模型,进行副回路的闭环阶跃响应仿真,如图6所示。
[0200]
提取闭环响应的特性参数,得到副回路闭环响应静态增益a2=1和副回路闭环响应上升时间tr=100s,从而得到副回路的闭环近似模型:
[0201]
t2=tr/2.2=45.45
[0202][0203]
将串级回路模型等效为二阶滞后模型,则等效串级回路开环模型为:
[0204][0205]
最后展开基于专家经验二自由度内模的串级回路pid控制器参数整定。在内模控制器c
1*
的基础上,增加f1用于调节系统的跟踪性,其作用等效于对sv1进行了滤波处理。m1为串级回路内部过程模型,通过op1可以得到串级回路的模型响应pv
1*
。真实的响应pv1与模型响应pv
1*
的差pv1﹣pv
1*
作为内模控制器c
1*
的反馈输入信号。通常,由于存在模型误差m1≠g’和未被考虑在模型中的未知扰动d1,因此pv1≠pv
1*
。在这个过程中,通过专家经验,依据内部过程模型m1对c
1*
和f1中的参数进行调节。
[0206]
对主回路采用pi控制器,其控制器结构为:
[0207][0208]
当c1和c
1*
满足以下关系时,图3和图4的串级回路整体的框图是等价的。
[0209][0210]
下面设计基于专家经验二自由度的主回路内模控制器:
[0211]
首先分解主回路的内部过程模型:
[0212]
m1=m
1 m1-[0213]m1
=e-τs
=e-60s
[0214][0215]
然后确定主回路的控制器:
[0216]
为了增加控制器的鲁棒性,加入一个低通滤波器f1:
[0217][0218]
其中,时间常数初始值取λ1=2(t1 τ)=835.2。
[0219]
据此设计主回路控制器为:
[0220][0221]
设计滤波器f为:
[0222][0223]
其中,时间常数初始值取λ=(t1 τ)=417.6。
[0224]
滤波控制器f1为:
[0225][0226]
在上述主回路控制器设计中,两个滤波器的时间常数λ1和λ的取值通过专家经验,结合模型m1中的时间常数和时滞时间与时间常数的比值的不同给定合适的值。本实施例中,λ1和λ的具体调节如表3和表4所示。
[0227]
表3温度回路的过程响应速度与λ1、λ调节量之间的关系
[0228]
温度回路慢较慢中较快快λ1调节量-(t1 τ)-0.5(t1 τ)00.5(t1 τ)(t1 τ)λ调节量-0.4(t1 τ)-0.2(t1 τ)00.2(t1 τ)0.4(t1 τ)
[0229]
表4温度回路的时滞程度与λ1、λ调节量之间的关系
[0230]
温度回路无时滞小时滞较大时滞大时滞λ1调节量0.2(t1 τ)0.1(t1 τ)-0.1(t1 τ)-0.2(t1 τ)λ调节量0.08(t1 τ)0.04(t1 τ)-0.04(t1 τ)-0.08(t1 τ)
[0231]
本实施例所述的该温度回路作为主回路,属于慢过程,小时滞,根据上表调节参数得到最终的λ1=459.4,λ=267.3。
[0232]
根据等价关系,采用一阶泰勒近似导出主回路pi控制器参数为:
[0233][0234]
经过量程转换和比例度换算,最终得到整定后的主副回路控制器参数分别为:
[0235][0236][0237]
最终的整定效果如图7所示,其中,图7(a)为整定后主回路温度设定值sv1和主回路温度测量值pv1的趋势图,图7(b)为整定后主回路控制器输出op1的趋势图,图7(c)为整定后副回路流量设定值sv2和副回路流量测量值pv2的趋势图,图7(d)为整定后副回路控制器输出op1的趋势图。整定后,消除了整定前副回路的阀门高频率的振荡,同时流量控制保持
了一定的跟随性,且在相同外界扰动的情况下,使温度控制较稳定且具有一定的跟随性。
[0238]
以上仅描述了本发明的基本原理和优选实施方式,本领域人员可以根据上述描述做出许多变化和改进,这些变化和改进应该属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。