1.本发明涉及玻璃加工设备技术领域,尤其涉及一种双层防火节能玻璃的自动封装设备。
背景技术:
2.当今,双层节能玻璃愈加广泛地应用于各种建筑物中,随着社会对能源利用效率的要求不断提高,双层节能玻璃具备更加广泛地应用前景。
3.双层节能玻璃需要两片节能玻璃外加一个玻璃框架拼装而成,现在双层节能玻璃的组装工艺主要通过人工完成,人工拼装虽然灵活性较强,但受制于操作人员的熟练度,无法保证双层玻璃成品品质的一致性,且密封胶或多或少对人体具有一定的有害性,不利于从事该岗位人员的身体健康。
4.根据上述,虽然现有技术中也存在一些能满足玻璃封装的设备,但是普遍只具备上胶和安装玻璃框架功能,无法在封装前,对玻璃边缘进行修边,即对存在的毛边、飞边等影响后续玻璃框架安装的多余区域进行切除,从而容易出现漏胶、框架尺寸偏斜等问题,最终极大影响了安装效果和质量。故而鉴于以上缺陷,实有必要设计一种双层防火节能玻璃的自动封装设备。
技术实现要素:
5.本发明所要解决的技术问题在于:提供一种双层防火节能玻璃的自动封装设备,来解决背景技术提出的问题。
6.为解决上述技术问题,本发明的技术方案是:一种双层防火节能玻璃的自动封装设备,包括架体、电动滑轨、第一电动推杆、第二电动推杆、第一机械臂、步进电机、转动盘、颜料喷涂泵、胶粘喷涂泵、激光切割头、加热器、第二机械臂,所述的电动滑轨固设于架体底部前后两端,所述的电动滑轨与架体采用焊接连接,所述的第一电动推杆固设于电动滑轨外侧,所述的第一电动推杆与电动滑轨采用螺栓连接,所述的第二电动推杆固设于第一电动推杆外侧上端,所述的第二电动推杆与第一电动推杆采用螺栓连接,所述的第一机械臂固设于第二电动推杆顶部,所述的第一机械臂与第二电动推杆采用螺栓连接,所述的步进电机固设于第一机械臂顶端,所述的步进电机与第一机械臂采用螺栓连接,所述的转动盘固设于步进电机一端,所述的转动盘与步进电机采用联轴器连接,所述的颜料喷涂泵固设于转动盘内部一侧,所述的颜料喷涂泵与转动盘采用螺栓连接,所述的胶粘喷涂泵固设于转动盘内部一侧,所述的胶粘喷涂泵与转动盘采用螺栓连接,所述的激光切割头固设于转动盘内部一侧,所述的激光切割头与转动盘采用螺栓连接,所述的加热器固设于转动盘内部一侧,所述的加热器与转动盘采用螺栓连接,所述的第二机械臂固设于架体顶部左侧前端和右侧后端,所述的第二机械臂与架体采用焊接连接。
7.进一步,所述的架体顶部中端还固设有输送机,所述的输送机与架体采用焊接连接,所述的输送机上端还固设有若干数量的玻璃夹持座,所述的玻璃夹持座与输送机采用
螺栓连接。
8.进一步,所述的第二电动推杆底部还固设有辅助滑轮,所述的辅助滑轮与第二电动推杆采用转动连接。
9.进一步,所述的颜料喷涂泵外侧还固设有颜料存储罐,所述的颜料存储罐与颜料喷涂泵采用焊接连接。
10.进一步,所述的胶粘喷涂泵外侧还固设有玻璃胶存储罐,所述的玻璃胶存储罐与胶粘喷涂泵采用焊接连接。
11.进一步,所述的激光切割头外侧还固设有激光发生器,所述的激光发生器与激光切割头采用螺栓连接。
12.进一步,所述的第二机械臂顶端还固设有电子夹持抓,所述的电子夹持抓与第二机械臂采用螺栓连接。
13.与现有技术相比,该一种双层防火节能玻璃的自动封装设备,具备以下功能;
14.1、首先由第一机械臂、颜料喷涂泵和激光切割头的相互配合作用,从而能在玻璃封装前,对玻璃边缘处进行切割修整,避免多余超出规定尺寸的玻璃影响后续玻璃框架安装的问题。
15.2、其次由第二机械臂、胶粘喷涂泵和加热器的作用,不仅能利于胶粘剂喷涂,方便后续玻璃框架的安装粘接,此外借助加热,亦可提高胶粘剂的固化速度,达到快速生产目的。
16.3、最后配合电动滑轨、第一电动推杆、第二电动推杆和步进电机,亦可满足多方向位置和角度的调节,拓展了实用性,很好的满足了玻璃自动封装的需求。
附图说明
17.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
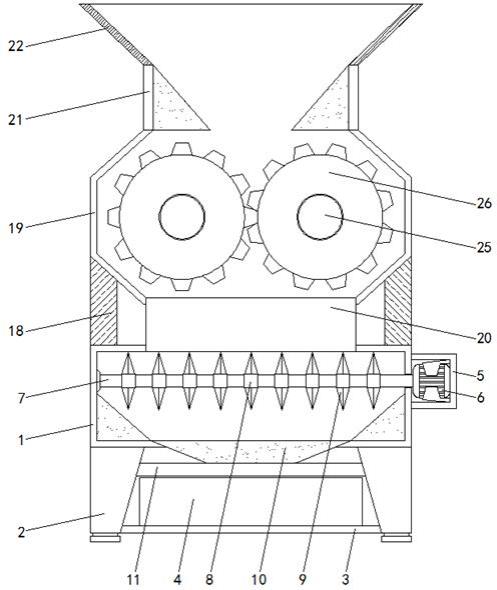
18.图1是一种双层防火节能玻璃的自动封装设备的主视图;
19.图2是一种双层防火节能玻璃的自动封装设备的俯视图;
20.图3是一种双层防火节能玻璃的自动封装设备的立体图1;
21.图4是一种双层防火节能玻璃的自动封装设备的立体图2;
22.图5是一种双层防火节能玻璃的自动封装设备的立体图3;
23.图6是转动盘部位的立体放大图。
24.架体1、电动滑轨2、第一电动推杆3、第二电动推杆4、第一机械臂5、步进电机6、转动盘7、颜料喷涂泵8、胶粘喷涂泵9、激光切割头10、加热器11、第二机械臂12、输送机101、玻璃夹持座102、辅助滑轮401、颜料存储罐801、玻璃胶存储罐901、激光发生器1001、电子夹持抓1201。
25.如下具体实施方式将结合上述附图进一步说明。
具体实施方式
26.在下文中,阐述了多种特定细节,以便提供对构成所描述实施例基础的概念的透彻理解,然而,对本领域的技术人员来说,很显然所描述的实施例可以在没有这些特定细节中的一些或者全部的情况下来实践,在其他情况下,没有具体描述众所周知的处理步骤。
27.在发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
28.如图1、图2、图3、图4、图5所示,一种双层防火节能玻璃的自动封装设备,包括架体1、电动滑轨2、第一电动推杆3、第二电动推杆4、第一机械臂5、步进电机6、转动盘7、颜料喷涂泵8、胶粘喷涂泵9、激光切割头10、加热器11、第二机械臂12,所述的电动滑轨2固设于架体1底部前后两端,所述的电动滑轨2与架体1采用焊接连接,所述的第一电动推杆3固设于电动滑轨2外侧,所述的第一电动推杆3与电动滑轨2采用螺栓连接,所述的第二电动推杆4固设于第一电动推杆3外侧上端,所述的第二电动推杆4与第一电动推杆3采用螺栓连接,所述的第一机械臂5固设于第二电动推杆4顶部,所述的第一机械臂5与第二电动推杆4采用螺栓连接,所述的步进电机6固设于第一机械臂5顶端,所述的步进电机6与第一机械臂5采用螺栓连接,所述的转动盘7固设于步进电机6一端,所述的转动盘7与步进电机6采用联轴器连接,所述的颜料喷涂泵8固设于转动盘7内部一侧,所述的颜料喷涂泵8与转动盘7采用螺栓连接,所述的胶粘喷涂泵9固设于转动盘7内部一侧,所述的胶粘喷涂泵9与转动盘7采用螺栓连接,所述的激光切割头10固设于转动盘7内部一侧,所述的激光切割头10与转动盘7采用螺栓连接,所述的加热器11固设于转动盘7内部一侧,所述的加热器11与转动盘7采用螺栓连接,所述的第二机械臂12固设于架体1顶部左侧前端和右侧后端,所述的第二机械臂12与架体1采用焊接连接;
29.需要说明的是该一种双层防火节能玻璃的自动封装设备具备以下功能;
30.a、节能玻璃正式封装前,第一机械臂5能根据预先设定的程序带动步进电机6、转动盘7、颜料喷涂泵8、胶粘喷涂泵9、激光切割头10和加热器11进行x、y和z轴的三维移动,即沿着玻璃的标准尺寸外沿进行多次循环移动;
31.b、第一次绕环移动时,颜料喷涂泵8将遮光涂料喷涂在玻璃边缘,以便玻璃边缘以及多余非规定尺寸被喷涂至遮光涂料;
32.c、第二次绕环移动时,激光切割头10将激光束射在玻璃边缘位置,对玻璃边缘毛边、多余非规定尺寸玻璃进行切割,使其达到规定尺寸目的;
33.d、第三次环绕移动时,胶粘喷涂泵9将胶粘剂喷涂在玻璃边缘位置,即达到上胶目的,当上胶后,第二机械臂12抓取玻璃框架安装在玻璃边缘处;
34.e、第四次环绕移动时,加热器11开启对玻璃边缘位置进行加热,使其提高胶粘剂的固化速度,利于玻璃片与玻璃框架快速相连固定;
35.f、玻璃封装操作过程中,电动滑轨2能带动第一电动推杆3进行左右方向的移动,实现左右位置大范围调节,第一电动推杆3能带动第二电动推杆4进行前后方向的移动,实现前后位置大范围调节,第二电动推杆4能带动第一机械臂5进行上下高度移动,达到高度调节,步进电机6能驱动转动盘7进行360
°
的角度旋转,实现了颜料喷涂泵8、胶粘喷涂泵9、
激光切割头10和加热器11的切换调节目的;
36.所述的架体1顶部中端还固设有输送机101,所述的输送机101与架体1采用焊接连接,所述的输送机101上端还固设有若干数量的玻璃夹持座102,所述的玻璃夹持座102与输送机101采用螺栓连接;
37.需要说明的是输送机101能进行从左至右的输送,当生产线前道工序的机械臂将玻璃片安装在玻璃夹持座102上后,借助输送机101的输送作用,利于玻璃片从左至右移动,便于了玻璃的组装生产工作;
38.所述的第二电动推杆4底部还固设有辅助滑轮401,所述的辅助滑轮401与第二电动推杆4采用转动连接;
39.需要说明的是辅助滑轮401能利于第二电动推杆4在第一电动推杆3的带动下进行前后滑动,提高移动稳定性;
40.所述的颜料喷涂泵8外侧还固设有颜料存储罐801,所述的颜料存储罐801与颜料喷涂泵8采用焊接连接;
41.需要说明的是颜料存储罐801内部可存储遮光涂料,借助颜料喷涂泵8的抽吸,将遮光涂料喷涂在玻璃边缘位置,通过遮光涂料的作用,有效避免了激光反射和折射问题,提高了激光切割的准确性和安全性;
42.所述的胶粘喷涂泵9外侧还固设有玻璃胶存储罐901,所述的玻璃胶存储罐901与胶粘喷涂泵9采用焊接连接;
43.需要说明的是玻璃胶存储罐901内部存储胶粘剂,能借助胶粘喷涂泵9的抽吸,将胶粘剂喷涂在玻璃边缘,利于后续玻璃框架的安装粘接;
44.所述的激光切割头10外侧还固设有激光发生器1001,所述的激光发生器1001与激光切割头10采用螺栓连接;
45.需要说明的是激光发生器1001为气体激光器,能产生激光束,当经过激光切割头10时,能聚焦,形成极小光斑,当接触到被喷涂颜料的玻璃边缘后能实现对玻璃边缘多余区域的切割目的;
46.所述的第二机械臂12顶端还固设有电子夹持抓1201,所述的电子夹持抓1201与第二机械臂12采用螺栓连接;
47.需要说明的是电子夹持抓1201能夹持现有技术中的玻璃框架,并借助第二机械臂12移动到玻璃的安装位置后进行松开,实现对玻璃框架的自动安装目的。
48.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。