1.本发明涉及无人水面艇系统的轨迹跟踪控制技术领域,具体而言,尤其涉及一种基于数据驱动的无人水面艇有限时间控制方法。
背景技术:
2.近些年来,由于运用无人水面艇(unmanned surface vehicle,usv)能够实现各种复杂的任务,如自主海洋勘探、环境监测、任务搜寻等,无人水面艇的轨迹跟踪控制问题在控制团体和军事领域得到了广泛的关注。进而,为了实现上述复杂任务,各种各样的控制方法,如滑模控制、反馈线性化控制、自适应控制、反步法控制等已经被应用于无人水面艇的先进控制系统中。值得提出的是,这些控制方法均需要有关无人水面艇动态数学模型的先验知识。然而,无人水面艇不可避免地遭受由于不确定海洋环境所诱导的扰动和不确定性,这使得获取其精确动态数学模型或者标称模型变得十分困难。因此,无人水面艇的无模型自适应跟踪控制将是一个富有挑战和亟需解决的难题。
3.借助于强大的拟合能力,神经网络技术被广泛应用于无人水面艇的轨迹跟踪控制器设计中。一方面,可以直接应用神经网络补偿无人水面艇的未建模动态、时变扰动、不确定性以及未知惯性矩阵。另一方面,也可以直接应用神经网络拟合控制器。近年来,借助于数字控制器技术的快速发展,数据驱动控制技术在应对未知非线性无人水面艇系统方面也得到了广泛的关注。应用于无人水面艇的常见数据驱动技术主要包括无模型自适应跟踪控制技术、数据驱动鲁棒反步控制技术等。然而,这些方法并没有考虑到无人水面艇控制系统的收敛速度问题。
4.在无人水面艇的轨迹跟踪控制系统中,运用滑模控制技术并借助其对未建模动态、时变扰动、不确定性的鲁棒性,能够很好地应对不确定海洋环境,如风、浪、流等对控制性能的影响。进而,为了更好地抑制外界扰动对跟踪性能的影响,终端滑模和非奇异终端滑模控制技术被广泛应用于无人水面艇轨迹跟踪控制系统中。区别于传统的具有渐进收敛特性的滑模控制方法,终端滑模控制技术能够使得跟踪误差以更快的有限时间收敛,进一步提升了无人水面艇系统抑制扰动的能力。然而现有的终端滑模控制方法大都基于无人水面艇系统的精确数学模型或者标称模型进行控制器构建的,并没有考虑存在扰动、难以建模情况下的终端滑模控制器的设计问题。因此,如何运用数据驱动技术,在存在扰动和模型未知的情况下构建数据驱动终端滑模控制器,并对无人水面艇系统中的扰动进行快速抑制是亟需解决的控制难题。
技术实现要素:
5.根据上述提出复杂环境下未知无人水面艇系统的轨迹跟踪控制的技术问题,提供一种基于数据驱动的无人水面艇有限时间控制方法。本发明主要结合数据驱动技术、终端滑模控制技术以及有限时间理论,设计无人水面艇系统的数据驱动有限时间控制策略。该策略确保了轨迹跟踪控制系统的收敛速度和收敛精度。
6.本发明采用的技术手段如下:
7.一种基于数据驱动的无人水面艇有限时间控制方法,包括如下步骤:
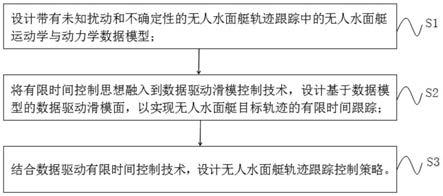
8.s1、设计带有未知扰动和不确定性的无人水面艇轨迹跟踪中的无人水面艇运动学与动力学数据模型;
9.s2、将有限时间控制思想融入到数据驱动滑模控制技术,设计基于数据模型的数据驱动滑模面,以实现无人水面艇目标轨迹的有限时间跟踪;
10.s3、结合数据驱动有限时间控制技术,设计无人水面艇轨迹跟踪控制策略。
11.进一步地,所述步骤s1的具体实现过程如下:
12.s11、考虑带有未知扰动和未建模动态,建立无人船数学模型,如下:
[0013][0014][0015]
其中,和ω=[u,v,r]
t
分别表示无人水面艇的位置向量和速度向量,τ=[τu,τv,τr]
t
表示无人水面艇的控制输入向量,τd=[τ
ud
,τ
vd
,τ
rd
]
t
表示无人水面艇所受的外界干扰和不确定性,表示无人水面艇系统的旋转矩阵,表示无人水面艇系统的旋转矩阵,和分别表示无人水面艇系统中的时变惯性矩阵、科里奥利矩阵和阻尼矩阵,并且均为实际中很难获取其精确模型的未知矩阵;
[0016]
s12、运用一阶欧拉法,获取无人水面艇的等效离散动态数学模型,如下:
[0017][0018]
ω
k 1
=f(mk,ωk,τ
d,k
,τk)
[0019]
其中,ts表示无人水面艇等效离散系统的采样时间,表示未知离散非线性函数;
[0020]
s13、基于获取的无人水面艇的等效离散动态数学模型,做如下假设:
[0021]
假设1:无人水面艇的等效离散动态数学模型满足lipschitz条件,即||δω
k 1
||≤γ0||δτ
d,k
δτk||,其中δω
k 1
=ω
k 1-ωk,δτ
d,k
=τ
d,k-τ
d,k-1
,δτk=τ
k-τ
k-1
,γ0为正常数;
[0022]
因此,基于无人水面艇的等效离散动态数学模型,在满足上述假设的条件下,当δτk≠0时,存在矩阵ξk和φk,使得无人水面艇的等效离散动态数学模型转换为如下的等效数
据模型:
[0023]
ω
k 1
=ωk ξkδτ
d,k
φkδτk[0024]
其中,
[0025]
s14、将步骤s13中的等效数据模型解耦为如下的形式:
[0026]
ω
k 1
=ωk λkδτk σ
all,k
[0027]
其中,σ
all,k
=ξkδτ
d,k
(φ
k-λk)δτk表示步骤s13等效数据模型中的扰动、耦合;
[0028]
s15、采用数据驱动技术和扰动观测器技术,获取无人水面艇系统的等效数据模型,如下:
[0029][0030]
其中,和按照如下的更新律进行更新:
[0031][0032]
φ
ii,k
=φ
ii,1
,if|φ
ii,k
|<δ
1,i
or sgn(φ
ii,k
)≠sgn(φ
ii,1
)
[0033][0034]
其中,i=1,2,3,l=diag{l1,l2,l3}为对角步长因子矩阵。
[0035]
进一步地,所述步骤s2的具体实现过程如下:
[0036]
s21、定义无人水面艇的轨迹跟踪误差为ε
1,k
=η
k-η
d,k
,则进一步结合运动学子系统得到:
[0037][0038]
s22、运用反步法技术,设计反步控制律,如下:
[0039][0040]
其中,β=diag{β1,β2,β3},βi∈(0,1),i=1,2,3为步长因子;
[0041]
s23、定义ε
2,k
=ω
k-αk,则将步骤s21中得到的公式进一步转化为:
[0042][0043]
s24、设计传统的反步终端滑模面,如下:
[0044][0045]
其中,c1=diag{c
11
,c
12
,c
13
},c2=diag{c
21
,c
22
,c
23
},p和q为正奇数,并且满足p<q;
[0046]
s25、结合步骤s15中获取的无人水面艇系统的等效数据模型,获取数据驱动反步终端滑模面,如下:
[0047][0048]
进一步地,所述步骤s3的具体实现过程如下:
[0049]
s31、令s
k 1
=0并结合步骤s24中的公式,获取等效滑模控制律,如下:
[0050][0051]
其中,ξ=diag{ξ1,ξ2,ξ3}为正对角矩阵;
[0052]
s32、为了保证无人水面艇轨迹跟踪滑模控制系统对外界扰动的鲁棒性,设计滑模不连续控制项,如下:
[0053][0054]
其中,为正对角矩阵;
[0055]
s33、基于步骤s31和步骤s32,获取无人水面艇轨迹跟踪控制系统的数据驱动有限时间滑模控制律,如下:
[0056]
δτ=δτ
eq,k
δτ
dis,k
。
[0057]
进一步地,所述方法还包括如下步骤:
[0058]
s4、对无人水面艇闭环轨迹跟踪控制系统的稳定性进行分析。
[0059]
进一步地,所述步骤s4的具体实现过程如下:
[0060]
s41、将步骤s14中的公式转化为如下的形式:
[0061][0062]
其中,表示步骤s13中等效数据模型中的扰动、耦合和未建模动态;
[0063]
s42、将步骤s24中设计的反步终端滑模面转换为如下的形式:
[0064][0065]
同时,存在μ
1j
使得如下不等式成立:
[0066][0067]
其中,为的第j个元素,并且j=1,2,3;
[0068]
s43、定义i=1,2,3,则存在μ
2j
使得如下不等式成立:
[0069][0070]
s44、结合步骤s43中的公式,得到如下的定理:
[0071]
定理1:针对步骤s12中获取的无人水面艇的等效离散动态数学模型,在满足假设1的条件下,当控制律采用步骤s33中公式的形式,并且滑模控制律中不连续项增益i=1,2,3的选取使得不等式成立时,系统的跟踪误差将以有限时间收敛到零点附近。
[0072]
进一步地,所述方法还包括证明步骤s44中的定理1的步骤,如下:
[0073]
s441、选取lyapunov函数如下:
[0074]vi,k
=|s
i,k
|
[0075]
其中,s
i,k
为sk的第i个元素,并且i=1,2,3;
[0076]
s442、将步骤s33获取的数据驱动有限时间滑模控制律带入步骤s25获取的数据驱动反步终端滑模面中,得到:
[0077][0078][0079]
s443、结合步骤s442中的两个公式,得到:
[0080][0081]
s444、定义δv
i,k
=|s
i,k
|-|s
i,k-1
|,并步骤s443中得到的公式带入差分lyapunov函数,得到:
[0082][0083]
进而,得出如下结论:
[0084]
①
当|s
i,k
|满足并且时,δv
i,k 1
<0;
[0085]
②
当|s
i,k
|满足并且时,δv
i,k 1
≤0;
[0086]
滑模控制系统最终到达准滑动模态,即结合步骤s24中设计的滑模面可知,无人水面艇系统的反步跟踪误差ε
2i,k
,i=1,2,3满足如下动态方程:
[0087][0088]
其中,满足由步骤s24中设计的滑模面可知,ε
2i,k
将在有限时间收敛到区域进而步骤s23中的公式可知,定理1得证。
[0089]
较现有技术相比,本发明具有以下优点:
[0090]
1、本发明提供的基于数据驱动的无人水面艇有限时间控制方法,针对复杂环境下未知无人水面艇系统的轨迹跟踪控制问题,结合数据驱动技术、终端滑模控制技术以及有限时间理论,设计无人水面艇系统的数据驱动有限时间控制策略。该策略确保了轨迹跟踪控制系统的收敛速度和收敛精度。
[0091]
2、本发明提供的基于数据驱动的无人水面艇有限时间控制方法,将无人水面艇系统中的未建模动态、时变扰动、不确定性视为集总的不确定项,通过设计数据驱动观测器,对其进行估计与补偿。从而最终实现了对集总扰动的鲁棒性以及不依赖无人水面艇模型的快速准确轨迹跟踪控制。
[0092]
基于上述理由本发明可在无人水面艇系统的轨迹跟踪控制技术等领域广泛推广。
附图说明
[0093]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0094]
图1为本发明方法流程图。
[0095]
图2为本发明实施例提供的闭环无人水面艇系统的位置跟踪曲线。
[0096]
图3为本发明实施例提供的闭环无人水面艇系统的速度输出曲线。
[0097]
图4为本发明实施例提供的闭环无人水面艇系统的控制输入曲线。
[0098]
图5为本发明实施例提供的闭环无人水面艇系统的滑模面输出曲线。
具体实施方式
[0099]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0100]
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0101]
如图1所示,本发明提供了一种基于数据驱动的无人水面艇有限时间控制方法,包括如下步骤:
[0102]
s1、设计带有未知扰动和不确定性的无人水面艇轨迹跟踪中的无人水面艇运动学与动力学数据模型;
[0103]
s2、将有限时间控制思想融入到数据驱动滑模控制技术,设计基于数据模型的数据驱动滑模面,以实现无人水面艇目标轨迹的有限时间跟踪;
[0104]
s3、结合数据驱动有限时间控制技术,设计无人水面艇轨迹跟踪控制策略。
[0105]
具体实施时,作为本发明优选的实施方式,所述步骤s1的具体实现过程如下:
[0106]
s11、考虑带有未知扰动和未建模动态,建立无人船数学模型,如下:
[0107][0108][0109]
其中,和ω=[u,v,r]
t
分别表示无人水面艇的位置向量和速度向量,τ=[τu,τv,τr]
t
表示无人水面艇的控制输入向量,τd=[τ
ud
,τ
vd
,τ
rd
]
t
表示无人水面艇所受的
外界干扰和不确定性,表示无人水面艇系统的旋转矩阵,表示无人水面艇系统的旋转矩阵,和分别表示无人水面艇系统中的时变惯性矩阵、科里奥利矩阵和阻尼矩阵,并且均为实际中很难获取其精确模型的未知矩阵;
[0110]
s12、运用一阶欧拉法,获取无人水面艇的等效离散动态数学模型,如下:
[0111][0112]
ω
k 1
=f(mk,ωk,τ
d,k
,τk)
[0113]
其中,ts表示无人水面艇等效离散系统的采样时间,表示未知离散非线性函数;
[0114]
s13、基于获取的无人水面艇的等效离散动态数学模型,做如下假设:
[0115]
假设1:无人水面艇的等效离散动态数学模型满足lipschitz条件,即||δω
k 1
||≤γ0||δτ
d,k
δτk||,其中δω
k 1
=ω
k 1-ωk,δτ
d,k
=τ
d,k-τ
d,k-1
,δτk=τ
k-τ
k-1
,γ0为正常数;
[0116]
因此,基于无人水面艇的等效离散动态数学模型,在满足上述假设的条件下,当δτk≠0时,存在矩阵ξk和φk,使得无人水面艇的等效离散动态数学模型转换为如下的等效数据模型:
[0117]
ω
k 1
=ωk ξkδτ
d,k
φkδτk[0118]
其中,
[0119]
s14、将步骤s13中的等效数据模型解耦为如下的形式:
[0120]
ω
k 1
=ωk λkδτk σ
all,k
[0121]
其中,σ
all,k
=ξkδτ
d,k
(φ
k-λk)δτk表示步骤s13等效数据模型中的扰动、耦合;
[0122]
s15、采用数据驱动技术和扰动观测器技术,获取无人水面艇系统的等效数据模型,如下:
[0123][0124]
其中,和按照如下的更新律进行更新:
[0125][0126]
φ
ii,k
=φ
ii,1
,if|φ
ii,k
|<δ
1,i
or sgn(φ
ii,k
)≠sgn(φ
ii,1
)
[0127][0128]
其中,i=1,2,3,l=diag{l1,l2,l3}为对角步长因子矩阵。
[0129]
具体实施时,作为本发明优选的实施方式,所述步骤s2的具体实现过程如下:
[0130]
s21、定义无人水面艇的轨迹跟踪误差为ε
1,k
=η
k-η
d,k
,则进一步结合运动学子系统得到:
[0131][0132]
s22、运用反步法技术,设计反步控制律,如下:
[0133][0134]
其中,β=diag{β1,β2,β3},βi∈(0,1),i=1,2,3为步长因子;
[0135]
s23、定义ε
2,k
=ω
k-αk,则将步骤s21中得到的公式进一步转化为:
[0136][0137]
s24、设计传统的反步终端滑模面,如下:
[0138][0139]
其中,c1=diag{c
11
,c
12
,c
13
},c2=diag{c
21
,c
22
,c
23
},p和q为正奇数,并且满足p<q;
[0140]
s25、结合步骤s15中获取的无人水面艇系统的等效数据模型,获取数据驱动反步终端滑模面,如下:
[0141][0142]
具体实施时,作为本发明优选的实施方式,所述步骤s3的具体实现过程如下:
[0143]
s31、令s
k 1
=0并结合步骤s24中的公式,获取等效滑模控制律,如下:
[0144][0145]
其中,ξ=diag{ξ1,ξ2,ξ3}为正对角矩阵;
[0146]
s32、为了保证无人水面艇轨迹跟踪滑模控制系统对外界扰动的鲁棒性,设计滑模不连续控制项,如下:
[0147][0148]
其中,为正对角矩阵;
[0149]
s33、基于步骤s31和步骤s32,获取无人水面艇轨迹跟踪控制系统的数据驱动有限时间滑模控制律,如下:
[0150]
δτ=δτ
eq,k
δτ
dis,k
。
[0151]
具体实施时,作为本发明优选的实施方式,所述方法还包括如下步骤:
[0152]
s4、对无人水面艇闭环轨迹跟踪控制系统的稳定性进行分析。所述步骤s4的具体实现过程如下:
[0153]
s41、将步骤s14中的公式转化为如下的形式:
[0154][0155]
其中,表示步骤s13中等效数据模型中的扰动、耦合和未建模动态;
[0156]
s42、将步骤s24中设计的反步终端滑模面转换为如下的形式:
[0157][0158]
同时,存在μ
1j
使得如下不等式成立:
[0159][0160]
其中,为的第j个元素,并且j=1,2,3;
[0161]
s43、定义i=1,2,3,则存在μ
2j
使得如下不等式成立:
[0162][0163]
s44、结合步骤s43中的公式,得到如下的定理:
[0164]
定理1:针对步骤s12中获取的无人水面艇的等效离散动态数学模型,在满足假设1的条件下,当控制律采用步骤s33中公式的形式,并且滑模控制律中不连续项增益i=1,2,3的选取使得如下不等式成立时,系统的跟踪误差将以有限时间收敛到零点附近。
[0165]
具体实施时,作为本发明优选的实施方式,所述方法还包括证明步骤s44中的定理1的步骤,如下:
[0166]
s441、选取lyapunov函数如下:
[0167]vi,k
=|s
i,k
|
[0168]
其中,s
i,k
为sk的第i个元素,并且i=1,2,3;
[0169]
s442、将步骤s33获取的数据驱动有限时间滑模控制律带入步骤s25获取的数据驱动反步终端滑模面中,得到:
[0170][0171][0172]
s443、结合步骤s442中的两个公式,得到:
[0173]
[0174]
s444、定义δv
i,k
=|s
i,k
|-|s
i,k-1
|,并步骤s443中得到的公式带入差分lyapunov函数,得到:
[0175][0176]
进而,得出如下结论:
[0177]
①
当|s
i,k
|满足并且时,δv
i,k 1
<0;
[0178]
②
当|s
i,k
|满足并且时,δv
i,k 1
≤0;
[0179]
滑模控制系统最终到达准滑动模态,即结合步骤s24中设计的滑模面可知,无人水面艇系统的反步跟踪误差ε
2i,k
,i=1,2,3满足如下动态方程:
[0180][0181]
其中,满足由步骤s24中设计的滑模面可知,ε
2i,k
将在有限时间收敛到区域进而步骤s23中的公式可知,定理1得证。
[0182]
为了验证本发明所设计的轨迹跟踪控制策略的有效性和优越性,进行了数学证明和仿真试验验证,如图2-5所示,本发明提供的基于数据驱动的无人水面艇有限时间控制方法,确保了轨迹跟踪控制系统的收敛速度和收敛精度,实现了对集总扰动的鲁棒性以及不依赖无人水面艇模型的快速准确轨迹跟踪控制。
[0183]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。