1.本发明应用于三角烧瓶圆口机背景,名称是一种基于物联网的智能高效三角烧瓶圆口机。
背景技术:
2.三角烧瓶圆口机是常用的医用管圆口机器,然而现有的三角烧瓶圆口机在完成圆口工作时,需要人工将三角烧瓶收捡起来,在耽误时间的同时并三角烧瓶容易破碎,现有的三角烧瓶圆口机在进行圆口工作时不能自动判断瓶口的匹配度,故,有必要提供一种基于物联网的智能高效三角烧瓶圆口机,可以达到提高工作效率的作用。
技术实现要素:
3.本发明的目的在于提供一种基于物联网的智能高效三角烧瓶圆口机,以解决上述背景技术中提出的问题。
4.为了解决上述技术问题,本发明提供如下技术方案:一种基于物联网的智能高效三角烧瓶圆口机,包含机壳和圆口机处理系统,其特征在于:所述机壳的底部开设有下口,所述下口的两侧均固定有连接板,两组所述连接板的内侧均固定有滑轨,两组所述滑轨的中间均滑动连接有固定杆,两组所述固定杆的中间固定有固定环,两组所述滑轨的一侧均滑动连接有伸缩杆一和伸缩杆二,两组所述伸缩杆一位于固定杆的左侧,两组所述伸缩杆二均位于固定杆的右侧,两组所述伸缩杆一的末端均固定有夹持环,两组所述伸缩杆二的末端均固定有半圆环,所述机壳的左侧轴承连接有转盘,所述转盘的内部固定有若干伸缩柱,若干所述伸缩柱的末端均固定有夹持板,所述机壳的左侧设置有电机,所述电机的输出轴与转盘为固定连接。
5.在一个实施例中,所述壳的底部均匀固定连接有连接杆,所述连接杆之间固定有固定轴,所述固定轴的表面轴承连接有滚轴,所述滚轴之间滑动连接有传动带,所述传动带的上方齿轮啮合有传动板,所述传动板位于机壳的下方,所述连接板贯穿于下口。
6.在一个实施例中,所述圆口机处理系统包括有前端运输模块、圆口处理模块和收捡模块,所述前端运输模块包括有厚度检测子模块、夹持子模块和伸缩子模块,所述夹持子模块包括有移动单元,所述圆口处理模块包括有拍摄子模块和分析子模块,所述厚度检测子模块分别位于固定环的左侧和右侧,所述夹持子模块分别与伸缩杆一和伸缩杆二为电连接,所述伸缩子模块与伸缩柱为电连接,所述拍摄子模块位于固定环的内部上方。
7.在一个实施例中,所述夹持子模块用于控制伸缩杆一和伸缩杆二伸缩,所述移动单元用于控制伸缩杆一、伸缩杆二和固定杆在滑轨上移动,所述伸缩子模块用于控制伸缩柱伸缩,所述拍摄子模块用于拍摄作用,并生成图象,所述分析子模块用于分析三角烧瓶瓶身和瓶口的匹配度。
8.在一个实施例中,所述前端运输模块和圆口处理模块包括以下具体操作步骤:
9.a1、工作人员将瓶身移动到转盘的内部,通过伸缩子模块控制伸缩柱向转盘的中
心靠拢,带动夹持板夹持瓶身;
10.a2、工作人员将瓶口放在两组半圆环之间,通过夹持子模块控制伸缩杆二伸长,使半圆环夹持住瓶身,并且通过移动单元控制伸缩杆二在滑轨上移动,使瓶口与转盘为同心状态;
11.a3、由于固定环与转盘和瓶口为同心状态,因此固定环两侧的厚度检测子模块分别检测瓶身和瓶口的厚度,并将信号传输给分析子模块;
12.a4、移动单元控制固定杆在滑轨上移动,使固定环套在瓶身外侧,且控制伸缩杆二带动瓶口向瓶身的方向移动,从而使瓶口和瓶身相接,使固定环套在瓶身和瓶口的相接处;
13.a5、通过拍摄子模块拍摄瓶身和瓶口的连接处,将生成的图象传输给分析子模块,分析瓶身和瓶口相接处的直径,结合瓶口和瓶身的厚度,判断瓶身和瓶口的匹配度。
14.在一个实施例中,所述a7包括以下具体操作步骤:
15.a51、分析子模块接收瓶身厚度和瓶口厚度,其中分为h
身
=h
口
和h
身
≠h
口
两种状态,单位为厘米,其中0<|h
身-h
后
|<0.1时,表示瓶身和瓶口的厚度差异为低级,|h
身-h
后
|≥0.1时,表示瓶身和瓶口的厚度差异为高级;
16.a52、设定瓶身和瓶口对相接处的直径相差程度为a级和b级,其中a=0,a《b,通过分析子模块接收拍摄子模块拍摄瓶身和瓶口对接处的照片,将其转换成数据,与a级和b级相对比,进行分析,从而分析出瓶身和瓶口连接处的直径相差程度;
17.a53、当h
身
=h
口
和0<|h
身-h
后
|<0.1时,且瓶身和瓶口对接处为a级,表示瓶身和瓶口匹配度为正常状态,可以继续后续的圆口工作;
18.当|h
身-h
后
|≥0.1时,且瓶身和瓶口对接处a级,表示瓶身和瓶口匹配度存在的差异为低级;
19.当瓶身和瓶口对接处b级,证明瓶身和瓶口的对接处不匹配,表示瓶身和瓶口匹配度存在的差异为高级。
20.在一个实施例中,所述收捡模块包括调整子模块、加热子模块、提示子模块和倒角子模块,所述调整子模块包括有启动单元,所述启动单元与电机为电连接,所述加热子模块位于固定环的内表面,所述倒角子模块位于固定环的两侧面;
21.所述调整子模块用于控制伸缩杆二微调,所述启动单元用于控制电机运作,所述提示子模块用于报警效果,所述加热子模块用于加热,所述倒角子模块用于倒角。
22.在一个实施例中,所述收捡模块包括以下具体操作步骤:
23.s1、当瓶身和瓶口匹配度存在的差异为低级时,将信号传输给移动单元,控制固定杆在滑轨上向右移动,同时控制伸缩杆二也向右移动,使瓶身和瓶口分别在固定环的两侧,此时将信号传输给倒角子模块,对瓶身和瓶口的连接处进行倒角;
24.s2、当瓶身和瓶口匹配度存在的差异为高级,使调整子模块无法对其进行调整,将信号传输给提示子模块。
25.在一个实施例中,所述s1包括以下具体操作步骤:
26.s11、当瓶身和瓶口匹配度为正常状态时,将信号传输给启动单元,控制电机带动转盘转动,从而使夹持板带动瓶身高速旋转,并控制加热子模块对瓶身和瓶口的连接处升温加热,将其融化,使瓶身和瓶口粘合在一起;
27.s12、当瓶身和瓶口匹配度粘合在一起时,将信号传输给移动子模块,控制固定杆
带动固定环向右移动,使固定环不再套住三角烧瓶的连接处;
28.s13、再通过移动单元带动伸缩杆一向下移动,带动粘合好的三角烧瓶向下移动到传动板表面;
29.s14、再通过夹持子模块时伸缩杆一收缩,此时通过传动带的运作,带动传动板移动,从而带动三角烧瓶的成品移动。
30.与现有技术相比,本发明所达到的有益效果是:本发明,通过设置有传动板,再通过夹持子模块时伸缩杆一收缩,此时通过传动带的运作,带动传动板移动,从而带动三角烧瓶的成品移动,以此代替人工操作,可以节约工作时间成本,并且增加产量。
附图说明
31.下面结合附图,通过对本技术的具体实施方式详细描述,将使本技术的技术方案及其它有益效果显而易见。
32.在附图中:
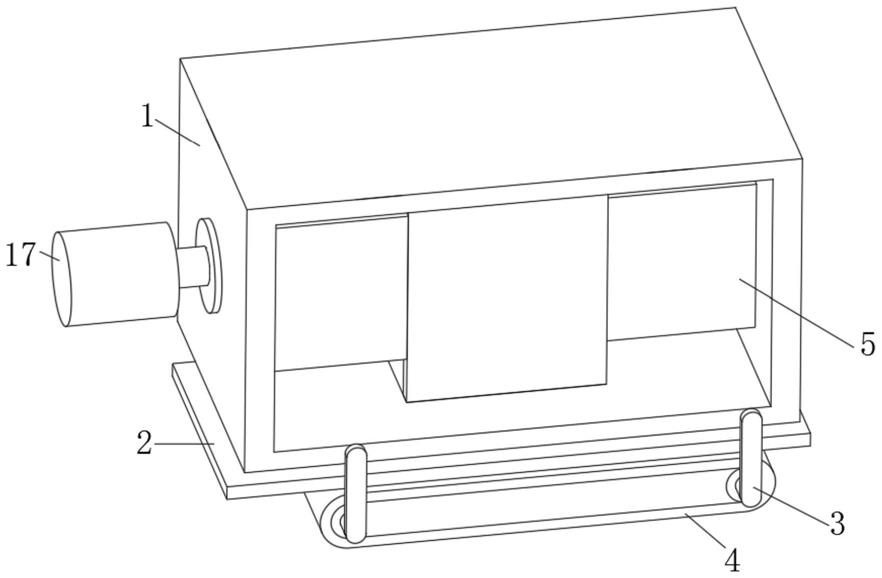
33.图1是本发明的整体结构示意图;
34.图2是本发明的整体结构剖视示意图;
35.图3是本发明的a区域局部放大示意图;
36.图4是本发明的圆口机处理系统示意图;
37.图中:1、机壳;2、传动板;3、连接杆;4、传动带;5、连接板;6、固定环;7、滑轨;8、固定杆;9、下口;10、伸缩杆一;11、夹持环;12、伸缩杆二;13、半圆环;14、伸缩柱;15、转盘;16、夹持板;17、电机。
具体实施方式
38.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
39.请参阅图1-4,本发明提供技术方案:一种基于物联网的智能高效三角烧瓶圆口机,包含机壳1和圆口机处理系统,其特征在于:机壳1的底部开设有下口9,下口9的两侧均固定有连接板5,两组连接板5的内侧均固定有滑轨7,两组滑轨7的中间均滑动连接有固定杆8,两组固定杆8的中间固定有固定环6,两组滑轨7的一侧均滑动连接有伸缩杆一10和伸缩杆二12,两组伸缩杆一10位于固定杆8的左侧,两组伸缩杆二12均位于固定杆8的右侧,两组伸缩杆一10的末端均固定有夹持环11,两组伸缩杆二12的末端均固定有半圆环13,机壳1的左侧轴承连接有转盘15,转盘15的内部固定有若干伸缩柱14,若干伸缩柱14的末端均固定有夹持板16,机壳1的左侧设置有电机17,电机17的输出轴与转盘15为固定连接。
40.机壳1的底部均匀固定连接有连接杆3,连接杆3之间固定有固定轴,固定轴的表面轴承连接有滚轴,滚轴之间滑动连接有传动带4,传动带4的上方齿轮啮合有传动板2,传动板2位于机壳1的下方,连接板5贯穿于下口9。
41.圆口机处理系统包括有前端运输模块、圆口处理模块和收捡模块,前端运输模块包括有厚度检测子模块、夹持子模块和伸缩子模块,夹持子模块包括有移动单元,圆口处理模块包括有拍摄子模块和分析子模块,厚度检测子模块分别位于固定环6的左侧和右侧,夹持子模块分别与伸缩杆一10和伸缩杆二12为电连接,伸缩子模块与伸缩柱14为电连接,拍摄子模块位于固定环6的内部上方。
42.夹持子模块用于控制伸缩杆一10和伸缩杆二12伸缩,移动单元用于控制伸缩杆一10、伸缩杆二12和固定杆8在滑轨7上移动,伸缩子模块用于控制伸缩柱14伸缩,拍摄子模块用于拍摄作用,并生成图象,分析子模块用于分析三角烧瓶瓶身和瓶口的匹配度。
43.前端运输模块和圆口处理模块包括以下具体操作步骤:
44.a1、工作人员将瓶身移动到转盘15的内部,通过伸缩子模块控制伸缩柱14向转盘15的中心靠拢,带动夹持板16夹持瓶身;
45.a2、工作人员将瓶口放在两组半圆环13之间,通过夹持子模块控制伸缩杆二12伸长,使半圆环13夹持住瓶身,并且通过移动单元控制伸缩杆二12在滑轨7上移动,使瓶口与转盘15为同心状态;
46.a3、由于固定环6与转盘15和瓶口为同心状态,因此固定环6两侧的厚度检测子模块分别检测瓶身和瓶口的厚度,并将信号传输给分析子模块;
47.a4、移动单元控制固定杆8在滑轨7上移动,使固定环6套在瓶身外侧,且控制伸缩杆二12带动瓶口向瓶身的方向移动,从而使瓶口和瓶身相接,使固定环6套在瓶身和瓶口的相接处;
48.a5、通过拍摄子模块拍摄瓶身和瓶口的连接处,将生成的图象传输给分析子模块,分析瓶身和瓶口相接处的直径,结合瓶口和瓶身的厚度,判断瓶身和瓶口的匹配度。
49.a7包括以下具体操作步骤:
50.a51、分析子模块接收瓶身厚度和瓶口厚度,其中分为h
身
=h
口
和h
身
≠h
口
两种状态,单位为厘米,其中0<|h
身-h
后
|<0.1时,表示瓶身和瓶口的厚度差异为低级,|h
身-h
后
|≥0.1时,表示瓶身和瓶口的厚度差异为高级;
51.a52、设定瓶身和瓶口对相接处的直径相差程度为a级和b级,其中a=0,a《b,通过分析子模块接收拍摄子模块拍摄瓶身和瓶口对接处的照片,将其转换成数据,与a级和b级相对比,进行分析,从而分析出瓶身和瓶口连接处的直径相差程度;
52.a53、当h
身
=h
口
和0<|h
身-h
后
|<0.1时,且瓶身和瓶口对接处为a级,表示瓶身和瓶口匹配度为正常状态,可以继续后续的圆口工作;
53.当|h
身-h
后
|≥0.1时,且瓶身和瓶口对接处a级,表示瓶身和瓶口匹配度存在的差异为低级;
54.当瓶身和瓶口对接处b级,证明瓶身和瓶口的对接处不匹配,表示瓶身和瓶口匹配度存在的差异为高级。
55.收捡模块包括调整子模块、加热子模块、提示子模块和倒角子模块,调整子模块包括有启动单元,启动单元与电机17为电连接,加热子模块位于固定环6的内表面,倒角子模块位于固定环6的两侧面;
56.调整子模块用于控制伸缩杆二12微调,启动单元用于控制电机17运作,提示子模块用于报警效果,加热子模块用于加热,倒角子模块用于倒角。
57.收捡模块包括以下具体操作步骤:
58.s1、当瓶身和瓶口匹配度存在的差异为低级时,将信号传输给移动单元,控制固定杆8在滑轨7上向右移动,同时控制伸缩杆二12也向右移动,使瓶身和瓶口分别在固定环6的两侧,此时将信号传输给倒角子模块,对瓶身和瓶口的连接处进行倒角,便于后续粘合在一起,在倒角完成之后重复a4步骤,使瓶身和瓶口相对接;
59.s2、当瓶身和瓶口匹配度存在的差异为高级,使调整子模块无法对其进行调整,将信号传输给提示子模块,使圆口机报警,便于工作人员手动更换瓶口;
60.s1包括以下具体操作步骤:
61.s11、当瓶身和瓶口匹配度为正常状态时,将信号传输给启动单元,控制电机17带动转盘15转动,从而使夹持板16带动瓶身高速旋转,并控制加热子模块对瓶身和瓶口的连接处升温加热,将其融化,使瓶身和瓶口粘合在一起;
62.s12、当瓶身和瓶口匹配度粘合在一起时,将信号传输给移动子模块,控制固定杆8带动固定环6向右移动,使固定环6不再套住三角烧瓶的连接处;
63.s13、再通过移动单元带动伸缩杆一10向下移动,带动粘合好的三角烧瓶向下移动到传动板2表面;
64.s14、再通过夹持子模块时伸缩杆一10收缩,此时通过传动带4的运作,带动传动板4移动,从而带动三角烧瓶的成品移动,以此代替人工操作,可以节约工作时间成本,并且增加产量。
65.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的。
66.以上对本技术实施例所提供的一种清洗装置进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的技术方案及其核心思想;本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例的技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。