一种机械间检修vr模拟培训方法
技术领域
1.本发明涉及一种机械间检修vr模拟培训方法。
背景技术:
2.随着虚拟现实(vr)技术的普及,应用于轨道交通行业的模拟培训系统也越来越多。借助vr技术,学员可以在完全虚拟的三维场景中对机车部件进行感知、认识,以及故障的检修及行车过程的模拟;从而提高了模拟驾驶培训系统的沉浸感与真实感。
3.虚拟现实技术是基于两座定位器的信号收发定位vr头盔与手柄在固定活动范围内的位置来反馈给程序,用户的位置信息无法与程序的物理引擎进行交互。此时虚拟场景中的学员是在一个三维立体的空间内,程序可控的只是基站定位的空间,而学员在空间内的移动只能单向的反馈给程序。所以现有vr软件都存在头部和双手穿过虚拟模型而没有物理反馈的问题,即头部穿模问题和手部穿模问题,也可以称为头显穿模问题和手柄穿模问题。
4.而且,在机车模拟培训领域,学员需要模拟在机械间进行检修操作。而机械间是一个封闭的、非常狭小的空间。因此,头部和手部穿模在机械间模拟培训时是非常常见的问题。
5.面对该问题,解决方式包括:
6.一,无视穿模。
7.二,穿模后使视角全部变黑,造成黑屏,从而提醒用户穿模。
8.三,通过振动手柄的方式体现用户穿模。
9.这些方式无疑会造成真实感差和用户体验下降。
技术实现要素:
10.本申请的目的在于提供一种机械间检修vr模拟培训方法,用以解决手柄穿模的问题。
11.为实现上述目的,本发明提出了一种机械间检修vr模拟培训方法,包括以下步骤:
12.为检测手柄添加碰撞体,碰撞体用于检测手柄与机械间墙体或者设备的接触;
13.当碰撞体检测到手柄与机械间墙体或者设备的接触,并且发生穿模时,记录穿模位置的坐标;
14.以该坐标为中心,显示涟漪效果。
15.进一步的,所述涟漪为圆形、矩形或者三角形。
16.本发明还提出了另一种机械间检修vr模拟培训方法,包括以下步骤:
17.将手柄模型替换为手部模型;为手部模型添加碰撞体;
18.将手柄模型替换为手部模型;
19.在每个指尖上延伸出一条沿指尖指向的检测射线;
20.当检测射线检测到手柄与物体模型接触时,以检测射线与接触面的接触点为圆
心,在接触面上生成穿孔模型,穿孔模型的大小随着手指与接触面的距离减少而增大;同时使渲染层级的高低关系为:穿孔模型>物体模型≥手部模型。
21.进一步的,手指在接触面移动时,根据检测射线与物体模型接触点为圆点来移动穿孔。
22.进一步的,手指接触到接触面时穿孔模型达到最大,手指穿过接触面后穿孔模型大小不再改变。
23.进一步的,当检测到两个穿孔模型接触时,将两个穿孔模型替换为一个至少涵盖对应的手指的穿孔模型。
24.进一步的,所述穿孔为圆形、三角形或矩形。
25.本发明的有益效果是:通过定位反馈给活动范围并且显示出来,既给了用户穿模的反馈也没有破坏用户的沉浸感。
附图说明
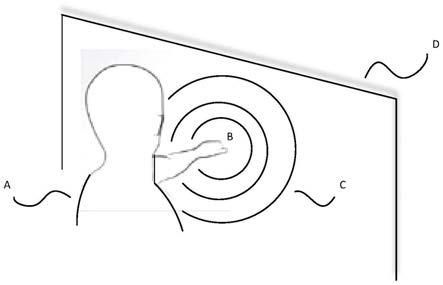
26.图1是实施例1的穿模方式示意图;
27.其中,a是人体模型,b是穿模位置,c为涟漪效果,d为机械间的墙壁模型;
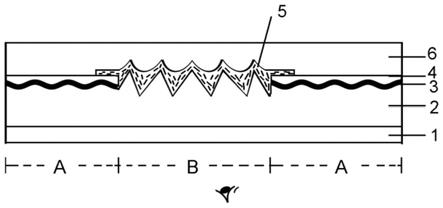
28.图2是实施例2的穿模方式示意图;
29.其中,1为物体模型,2为手柄模型,3为射线,4为穿孔模型。
具体实施方式
30.手柄穿模与头显穿模不同,手柄定位的位置并不会影响到整个活动范围或用户位置,因此并不适用于头显穿模的方法。本发明中,主要构思是使手柄穿模更具有交互性,以提醒用户注意,主要方法是通过定位反馈给活动范围并且显示出来。
31.实施例1
32.如图1所示,手柄穿过模型的部分会通过碰撞体触发记录接触点坐标,然后在坐标点生成一个涟漪特效。这样既给了用户穿模的反馈也没有破坏用户的沉浸感。
33.具体步骤包括:
34.检测手柄添加碰撞体,碰撞体用于检测手柄与机械间墙体或者设备的接触;
35.当碰撞体检测到手柄与机械间墙体或者设备的接触,并且发生穿模时,记录穿模位置的坐标;
36.以该坐标为中心,显示涟漪效果。
37.如图1中,涟漪的形状为圆形,作为其他实施方式,还可以为矩形、三角形等其他形状。
38.作为其他实施方式,还可以在穿模时结合手柄的振动对用户进行提醒。
39.实施例2
40.如图2所示为一种穿透物体的效果。
41.具体步骤包括:
42.将手柄模型替换为手部模型;
43.在每个指尖上延伸出一条沿指尖指向的检测射线3(检测射线即为一种碰撞体);检测射线3的意义在于:在手指实际接触到表面之前,系统将能更好地确定具体的穿模角
度。
44.当检测射线检测到手柄与物体模型(即机械间墙体或者设备模型)接触时,以检测射线与接触面的接触点为圆心,在接触面上生成穿孔模型,穿孔模型的大小随着手指与接触面的距离减少而增大(圆形以射线为圆心放大)。手指接触到接触面时穿孔模型达到最大,手指穿过接触面后穿孔模型大小不再改变。同时改变渲染规则,使渲染层级的高低关系为:穿孔模型>物体模型≥手部模型,从而产生穿孔模型被戳透的视觉效果。如图2中,食指2穿过物体1时生成穿孔4,穿孔位于食指周围、在接触面上。
45.并且,手指在接触面移动时,以检测射线与物体模型接触点为圆点来移动穿孔。
46.当检测到两个穿孔模型接触时,将两个穿孔模型替换为一个至少涵盖对应的手指的穿孔模型。也就是说,若随着手部穿模程度变大,以致手掌部分发生穿模时,可以重新生成一个大型的穿孔模型以替换原穿孔模型,该穿孔模型可以涵盖几个手指或者整个手部。该大型穿孔模型仍然在接触面上,与前述穿孔模型的渲染规则相同。
47.本实施例中采用了圆形穿孔,作为其他实施方式,也可以采用三角形、矩形等其他形状的穿孔。
技术特征:
1.一种机械间检修vr模拟培训方法,其特征在于,包括以下步骤:为检测手柄添加碰撞体,碰撞体用于检测手柄与机械间墙体或者设备的接触;当碰撞体检测到手柄与机械间墙体或者设备的接触,并且发生穿模时,记录穿模位置的坐标;以该坐标为中心,显示涟漪效果。2.根据权利要求1所述的一种机械间检修vr模拟培训方法,其特征在于,所述涟漪为圆形、矩形、三角形、放射形或其他各种规则、不规则形状。3.一种机械间检修vr模拟培训方法,其特征在于,包括以下步骤:将手柄模型替换为手部模型;在每个指尖上延伸出一条沿指尖指向的检测射线;当检测射线检测到手柄与物体模型接触时,以检测射线与接触面的接触点为圆心,在接触面上生成穿孔模型,穿孔模型的大小随着手指与接触面的距离减少而增大;同时使渲染层级的高低关系为:穿孔模型>物体模型≥手部模型。4.根据权利要求3所述的一种机械间检修vr模拟培训方法,其特征在于,手指在接触面移动时,根据手部模型与物体的根据检测射线与物体模型接触点为圆点来移动穿孔。5.根据权利要求3所述的一种机械间检修vr模拟培训方法,其特征在于,手指接触到接触面时穿孔模型达到最大,手指穿过接触面后穿孔模型大小不再改变。6.根据权利要求5所述的一种机械间检修vr模拟培训方法,其特征在于,当检测到两个穿孔模型接触时,将两个穿孔模型替换为一个至少涵盖对应的手指的穿孔模型。7.根据权利要求3-6任一项所述的一种机械间检修vr模拟培训方法,其特征在于,所述穿孔为圆形、三角形、矩形、放射形或其他各种规则、不规则形状。
技术总结
本发明涉及一种机械间检修VR模拟培训方法,包括以下步骤:为检测手柄添加碰撞体,碰撞体用于检测手柄与机械间墙体或者设备的接触;当碰撞体检测到手柄与机械间墙体或者设备的接触,并且发生穿模时,记录穿模位置的坐标;以该坐标为中心,显示涟漪效果。本发明的有益效果是:通过定位反馈给活动范围并且显示出来,既给了用户穿模的反馈也没有破坏用户的沉浸感。感。感。
技术研发人员:刘永杰 尹俊磊 秦世豪 赵翔
受保护的技术使用者:郑州畅想高科股份有限公司
技术研发日:2020.11.11
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。