一种led点光源激光雷达互动校准方法及系统
技术领域
1.本发明涉及校准技术领域,尤其涉及一种led点光源激光雷达互动校准方法及系统。
背景技术:
2.由于现在传统的led点光源感应互动,都是一个灯一个配一个感应器,造成不能大面积进行感应人机互动。激光雷达的诞生,可根据激光雷达感应物体定位,使得led点光源可以大面积进行互动。但对于大面积与异形的布灯方式led点光源校准时目标校准像素点位的确定计算非常复杂,并且费时费力,如果选择校准像素点位不准确,还会导致感应互动不准。
技术实现要素:
3.针对上述问题中存在的不足之处,本发明提供一种led点光源激光雷达互动校准方法及系统。
4.为实现上述目的,本发明提供一种led点光源激光雷达互动校准方法,包括:
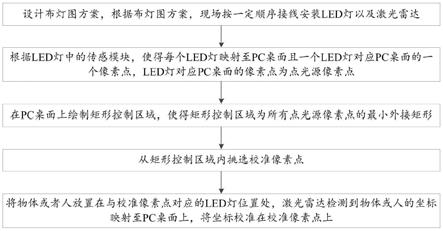
5.设计布灯图方案,根据所述布灯图方案,现场按一定顺序接线安装led灯以及激光雷达;
6.根据所述led灯中的传感模块,使得每个所述led灯映射至pc桌面且一个所述led灯对应所述pc桌面的一个像素点,所述led灯对应所述pc桌面的像素点为点光源像素点;
7.在所述pc桌面上绘制矩形控制区域,使得所述矩形控制区域为所有所述点光源像素点的最小外接矩形;
8.从所述矩形控制区域内挑选校准像素点;
9.将物体或者人放置在与所述校准像素点对应的所述led灯位置处,所述激光雷达检测到所述物体或人的坐标映射至所述pc桌面上,将所述坐标校准在所述校准像素点上;
10.其中,从所述矩形控制区域内挑选校准像素点包括:
11.将所述矩形控制区域沿其中心点缩进10%,得到缩进矩形区域;
12.遍历位于所述缩进矩形区域内的所述点光源像素点,从中挑选分别与所述缩进矩形区域四个顶点最近的四个所述点光源像素点;
13.将四个所述点光源像素点依次连接形成多边形,判断所述多边形是否为凸多边形,若是,则四个所述点光源像素点为所述校准像素点;若不是,则将位于凹点重新挑选,直至四个所述点光源像素点连接形成凸多边形。
14.优选的是,若所述矩形控制区域范围超过所述激光雷达的检测范围,则设置多个所述激光雷达,使得所有的所述led灯位于所述激光雷达的检测范围内。
15.优选的是,若为多个所述激光雷达,则根据所述激光雷达的识别范围以及所述激光雷达安装位置,对所述矩形控制区域进行划分,生成若干矩形分控区。
16.优选的是,对所述矩形控制区域进行划分,生成若干矩形分控区包括:
17.若所述矩形控制区域的高度大于宽度,且宽度小于所述激光雷达检测半径,则沿纵向进行平均分配,且生成所述矩形分控区数量=所述矩形控制区域的高度/所述激光雷达检测半径;
18.若所述矩形控制区域的宽度大于高度,且高度小于所述激光雷达检测半径,则横向进行平均分配,且生成所述矩形分控区数量=所述矩形控制区域的宽度/所述激光雷达检测半径;
19.若所述矩形控制区域的宽度和高度均大于所述激光雷达检测半径,则同时横向纵向进行平均分配,且生成所述矩形分控区数量=(所述矩形控制区域的宽度/所述激光雷达检测半径)*(所述矩形控制区域的高度/所述激光雷达检测半径)。
20.优选的是,对每个所述矩形分控区挑选所述校准像素点。
21.优选的是,若不是,则将位于凹点重新挑选,直至四个所述点光源像素点连接形成凸多边形包括:
22.将所述凹点与其对应的所述顶点连接成一个线段,并以所述凹点为圆形,所述线段为半径进行旋转,依次对所述线段遇到的所述像素点进行判断,直至四个所述点光源像素点连接形成凸多边形。
23.优选的是,将物体或者人放置在与所述校准像素点对应的所述led灯位置处,所述激光雷达检测到所述物体或人的坐标映射至所述pc桌面上,将所述坐标校准在所述校准像素点上包括:
24.将挑选出来的所述校准像素点按顺序存储至队列中;
25.按照所述队列顺序依次进行校准;
26.且将准备校准的所述校准像素点对应的所述led灯点亮为绿色;等待校准的所述校准像素点对应的所述led灯点亮为黄色;校准完毕的所述校准像素点对应的所述led灯点亮为红色;
27.将所述物体或者人放置绿色的所述led灯上进行校准。
28.本发明还提供一种led点光源激光雷达互动校准系统,包括:
29.设计模块,用于设计布灯图方案,根据所述布灯图方案,现场按一定顺序接线安装led灯以及激光雷达;
30.pc桌面模块,用于根据所述led灯中的传感模块,使得每个所述led灯映射至pc桌面且一个所述led灯对应所述pc桌面的一个像素点,所述led灯对应所述pc桌面的像素点为点光源像素点;
31.绘制模块,用于在所述pc桌面上绘制矩形控制区域,使得所述矩形控制区域为所有所述点光源像素点的最小外接矩形;
32.挑选模块,用于从所述矩形控制区域内挑选校准像素点;
33.校准模块,用于将物体或者人放置在与所述校准像素点对应的所述led灯位置处,所述激光雷达检测到所述物体或人的坐标映射至所述pc桌面上,将所述坐标校准在所述校准像素点上;
34.其中,从所述矩形控制区域内挑选校准像素点包括:
35.将所述矩形控制区域沿其中心点缩进10%,得到缩进矩形区域;
36.遍历位于所述缩进矩形区域内的所述点光源像素点,从中挑选分别与所述缩进矩
形区域四个顶点最近的四个所述点光源像素点;
37.将四个所述点光源像素点依次连接形成多边形,判断所述多边形是否为凸多边形,若是,则四个所述点光源像素点为所述校准像素点;若不是,则将位于凹点重新挑选,直至四个所述点光源像素点连接形成凸多边形。
38.优选的是,若所述矩形控制区域范围超过所述激光雷达的检测范围,则设置多个所述激光雷达,使得所有的所述led灯位于所述激光雷达的检测范围内;若为多个所述激光雷达,则根据所述激光雷达的识别范围以及所述激光雷达安装位置,对所述矩形控制区域进行划分,生成若干矩形分控区。
39.优选的是,对所述矩形控制区域进行划分,生成若干矩形分控区包括:
40.若所述矩形控制区域的高度大于宽度,且宽度小于所述激光雷达检测半径,则沿纵向进行平均分配,且生成所述矩形分控区数量=所述矩形控制区域的高度/所述激光雷达检测半径;
41.若所述矩形控制区域的宽度大于高度,且高度小于所述激光雷达检测半径,则横向进行平均分配,且生成所述矩形分控区数量=所述矩形控制区域的宽度/所述激光雷达检测半径;
42.若所述矩形控制区域的宽度和高度均大于所述激光雷达检测半径,则同时横向纵向进行平均分配,且生成所述矩形分控区数量=(所述矩形控制区域的宽度/所述激光雷达检测半径)*(所述矩形控制区域的高度/所述激光雷达检测半径)。
43.与现有技术相比,本发明的有益效果为:
44.本发明解决led点光源基于pc桌面互动控制区域确认难问题,可直接根据布灯位图直接计算得到所有控制分区;根据所有控制分区自动计算得到校准像素点,使校准点自动远离角落,并精准计算得到最佳校准像素点位。
附图说明
45.图1为本发明中led点光源激光雷达互动校准方法的流程图;
46.图2为本发明中led点光源激光雷达互动校准方法中实施例布灯图;
47.图3为图2实施例中对矩形控制区域进行划分的分控区图;
48.图4为图3中单个矩形分控区对中心点进行缩进10%的缩进矩形图abcd;
49.图5为图4中根据缩进10%矩形区域获取校准点位图,并连接成凸多边形efgh图;
50.图6为图2实施例校准完成后的实际效果图。
具体实施方式
51.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、
以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
53.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
54.下面结合附图1对本发明做进一步的详细描述:
55.参照图1,本发明提供一种led点光源激光雷达互动校准方法,包括:
56.设计布灯图方案,根据布灯图方案,现场按一定顺序接线安装led灯以及激光雷达;
57.具体地,在cad上设计布灯图方案,可设计成各种图案,例如花瓣等等一系列的图形,并按照该设计布灯图方案进行接线安装。
58.根据led灯中的传感模块,使得每个led灯映射至pc桌面且一个led灯对应pc桌面的一个像素点,led灯对应pc桌面的像素点为点光源像素点;
59.具体地,安装完毕后在led灯光控制系统里的进行led点光源灯位摆放,使现实中的每一个led灯对应pc桌面的一个像素,根据布好布灯位图,直接导出bmp格式的布灯图片。布灯图导出后,所有的白色点位表示点光源灯具对应的像素,黑色位置表示空闲区域。将布灯位图导入激光雷达互动系统。激光雷达互动系统中实现布灯位图的一键导入,导入后将布灯位图绘制显示窗口,方便直观浏览,且操作简单。如后期修改布灯位图,重新导入即可。而激光雷达互动系统是由激光雷达硬件设备与激光雷达互动软件组成。其中激光雷达设备应用于互动的最大识别物理距离为30米半径,识别30米半径以内的所有物体坐标,物体坐标是一激光雷达为原点的相对距离坐标。激光雷达互动软件是采集激光雷达识别到的物体坐标数据,实现激光雷达检测的物体物理坐标到图形相互映射。同时实现雷达感应得到的所有坐标中得到任意四个可组成凸多边形四个坐标点,与pc显示桌面对应的任意4个像素点进行仿射变换映射,将所有激光雷达感应到的物体点一一映射到pc显示桌面对应区域的像素点。
60.在pc桌面上绘制矩形控制区域,使得矩形控制区域为所有点光源像素点的最小外接矩形,即按照从左到右、从上到下的顺序遍历布灯位图中的所有白色像素点,得到每行每列像素中的最小最大x,y坐标,对得到的所有坐标点进行顺时针连线,通过包含与被包含、交叉、点与线关系几何算法,得到包含所有led点光源布灯图像素的最小外接矩形;
61.具体地,若矩形控制区域范围超过激光雷达的检测范围,则设置多个激光雷达,使得所有的led灯位于激光雷达的检测范围内;若为多个激光雷达,则根据激光雷达的识别范围以及激光雷达安装位置,对矩形控制区域进行划分,生成若干矩形分控区;对矩形控制区域进行划分,生成若干矩形分控区包括:
62.若矩形控制区域的高度大于宽度,且宽度小于激光雷达检测半径,则沿纵向进行平均分配,且生成矩形分控区数量=矩形控制区域的高度/激光雷达检测半径;
63.若矩形控制区域的宽度大于高度,且高度小于激光雷达检测半径,则横向进行平均分配,且生成矩形分控区数量=矩形控制区域的宽度/激光雷达检测半径;
64.若矩形控制区域的宽度和高度均大于激光雷达检测半径,则同时横向纵向进行平均分配,且生成矩形分控区数量=(矩形控制区域的宽度/激光雷达检测半径)*(矩形控制区域的高度/激光雷达检测半径);
65.对每个矩形分控区挑选校准像素点;
66.将物体或者人放置在与校准像素点对应的led灯位置处,激光雷达检测到物体或人的坐标映射至pc桌面上,将坐标校准在校准像素点上;
67.其中,从矩形分控区内挑选校准像素点包括:
68.将矩形控制区域沿其中心点缩进10%,得到缩进矩形区域;
69.遍历位于缩进矩形区域内的点光源像素点,从中挑选分别与缩进矩形区域四个顶点最近的四个点光源像素点;
70.将四个点光源像素点依次连接形成多边形,判断多边形是否为凸多边形,若是,则四个点光源像素点为校准像素点;若不是,则将位于凹点重新挑选,直至四个点光源像素点连接形成凸多边形。
71.具体地,将凹点与其对应的顶点连接成一个线段,并以凹点为圆形,线段为半径进行旋转,依次对线段遇到的像素点进行判断,直至四个点光源像素点连接形成凸多边形。
72.在本实施例中,将物体或者人放置在与校准像素点对应的led灯位置处,激光雷达检测到物体或人的坐标映射至pc桌面上,将坐标校准在校准像素点上包括:
73.将挑选出来的校准像素点按顺序存储至队列中;
74.按照队列顺序依次进行校准;
75.且将准备校准的校准像素点对应的led灯点亮为绿色;等待校准的校准像素点对应的led灯点亮为黄色;校准完毕的校准像素点对应的led灯点亮为红色;
76.将物体或者人放置绿色的led灯上进行校准。
77.通过上述方法,本发明解决led点光源基于pc桌面互动控制区域确认难问题,可直接根据布灯位图直接进行计算得到所有控制分区,根据所有控制分区自动计算得到校准像素点,使校准点自动远离角落,并精准计算得到最佳校准像素点位;且本发明解决led点光源互动校准流程复杂问题,对准备校准点、待校准点、校准过的点进行颜色区分,使操作技术人员不易出错,校准时校准点通过颜色改变让使用者更加容易操作,节省时间成本,可很好规避误操作。
78.实施例
79.参照图2,本实施例设计一种花瓣图形的布灯图方案,该灯形成花瓣形状且在花瓣的周围安装有4个激光雷达。
80.在现场按照该布灯图的方案,按一定顺序接线安装led灯以及激光雷达;
81.然后通过led灯中的传感模块,将现场安装的每个led灯映射至pc桌面且一个led灯对应pc桌面的一个像素点,led灯对应pc桌面的像素点为点光源像素点,即在led灯光控制系统里的进行led点光源灯位摆放,使现实中的每一个led灯对应pc桌面的一个像素,在pc桌面上显示出与现场安装一致的灯图,将该灯图直接导出成bmp格式的布灯图片;
82.将该bmp格式的布灯图片导入激光雷达互动系统中,绘制矩形控制区域,使得矩形控制区域为所有点光源像素点的最小外接矩形;
83.通过实际安装的激光雷达检测范围,在花瓣周围设有4个激光雷达,且矩形控制区
域的宽度和高度均大于激光雷达检测半径,则同时横向纵向进行平均分配,即该矩形控制区域划分为4个矩形分控区,如图3所示;
84.在每个矩形分控区内挑选校准像素点,即将该矩形分控区沿其中心点缩进10%,得到缩进矩形区域abcd,如图4所示;
85.遍历位于缩进矩形区域abcd内的点光源像素点,从中挑选分别与缩进矩形区域四个顶点最近的四个点光源像素点,将四个点光源像素点依次连接形成多边形,判断多边形是否为凸多边形,若是,则四个点光源像素点为校准像素点,如图5所示,即该校准像素点位e、f、g和h;
86.将物体或者人放置绿色的led灯上进行校准。
87.校准完毕后,如图6所示。
88.本发明还提供一种led点光源激光雷达互动校准系统,包括:
89.设计模块,用于设计布灯图方案,根据布灯图方案,现场按一定顺序接线安装led灯以及激光雷达;
90.具体地,在cad上设计布灯图方案,可设计成各种图案,例如花瓣等等一系列的图形,并按照该设计布灯图方案进行接线安装。
91.pc桌面模块,用于根据led灯中的传感模块,使得每个led灯映射至pc桌面且一个led灯对应pc桌面的一个像素点,led灯对应pc桌面的像素点为点光源像素点;
92.具体地,安装完毕后在led灯光控制系统里的进行led点光源灯位摆放,使现实中的每一个led灯对应pc桌面的一个像素,根据布好布灯位图,直接导出bmp格式的布灯图片。布灯图导出后,所有的白色点位表示点光源灯具对应的像素,黑色位置表示空闲区域。将布灯位图导入激光雷达互动系统。激光雷达互动系统中实现布灯位图的一键导入,导入后将布灯位图绘制显示窗口,方便直观浏览,且操作简单。如后期修改布灯位图,重新导入即可。而激光雷达互动系统是由激光雷达硬件设备与激光雷达互动软件组成。其中激光雷达设备应用于互动的最大识别物理距离为30米半径,识别30米半径以内的所有物体坐标,物体坐标是一激光雷达为原点的相对距离坐标。激光雷达互动软件是采集激光雷达识别到的物体坐标数据,实现激光雷达检测的物体物理坐标到图形相互映射。同时实现雷达感应得到的所有坐标中得到任意四个可组成凸多边形四个坐标点,与pc显示桌面对应的任意4个像素点进行仿射变换映射,将所有激光雷达感应到的物体点一一映射到pc显示桌面对应区域的像素点。
93.绘制模块,在pc桌面上绘制矩形控制区域,使得矩形控制区域为所有点光源像素点的最小外接矩形,即按照从左到右、从上到下的顺序遍历布灯位图中的所有白色像素点,得到每行每列像素中的最小最大x,y坐标,对得到的所有坐标点进行顺时针连线,通过包含与被包含、交叉、点与线关系几何算法,得到包含所有led点光源布灯图像素的最小外接矩形;
94.具体地,若矩形控制区域范围超过激光雷达的检测范围,则设置多个激光雷达,使得所有的led灯位于激光雷达的检测范围内;若为多个激光雷达,则根据激光雷达的识别范围以及激光雷达安装位置,对矩形控制区域进行划分,生成若干矩形分控区;对矩形控制区域进行划分,生成若干矩形分控区包括:
95.若矩形控制区域的高度大于宽度,且宽度小于激光雷达检测半径,则沿纵向进行
平均分配,且生成矩形分控区数量=矩形控制区域的高度/激光雷达检测半径;
96.若矩形控制区域的宽度大于高度,且高度小于激光雷达检测半径,则横向进行平均分配,且生成矩形分控区数量=矩形控制区域的宽度/激光雷达检测半径;
97.若矩形控制区域的宽度和高度均大于激光雷达检测半径,则同时横向纵向进行平均分配,且生成矩形分控区数量=(矩形控制区域的宽度/激光雷达检测半径)*(矩形控制区域的高度/激光雷达检测半径);
98.挑选模块,用于从矩形控制区域内挑选校准像素点;
99.校准模块,用于将物体或者人放置在与校准像素点对应的led灯位置处,激光雷达检测到物体或人的坐标映射至pc桌面上,将坐标校准在校准像素点上;
100.其中,从矩形分控区内挑选校准像素点包括:
101.将矩形控制区域沿其中心点缩进10%,得到缩进矩形区域;
102.遍历位于缩进矩形区域内的点光源像素点,从中挑选分别与缩进矩形区域四个顶点最近的四个点光源像素点;
103.将四个点光源像素点依次连接形成多边形,判断多边形是否为凸多边形,若是,则四个点光源像素点为校准像素点;若不是,则将位于凹点重新挑选,直至四个点光源像素点连接形成凸多边形。
104.具体地,将凹点与其对应的顶点连接成一个线段,并以凹点为圆形,线段为半径进行旋转,依次对线段遇到的像素点进行判断,直至四个点光源像素点连接形成凸多边形。
105.在本实施例中,将物体或者人放置在与校准像素点对应的led灯位置处,激光雷达检测到物体或人的坐标映射至pc桌面上,将坐标校准在校准像素点上包括:
106.将挑选出来的校准像素点按顺序存储至队列中;
107.按照队列顺序依次进行校准;
108.且将准备校准的校准像素点对应的led灯点亮为绿色;等待校准的校准像素点对应的led灯点亮为黄色;校准完毕的校准像素点对应的led灯点亮为红色;
109.将物体或者人放置绿色的led灯上进行校准。。
110.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。