技术特征:
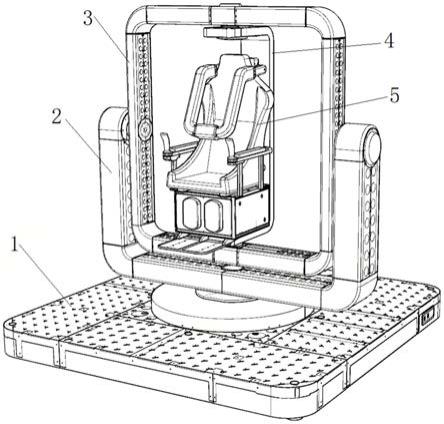
1.一种四轴运动仿真系统,其特征在于:所述四轴运动仿真系统包括:底座、外环、中环、内环和偏移座椅框;所述外环安装在底座上,所述中环安装在外环上,所述内环安装在中环上,所述偏移座椅框安装在内环上;所述外环能够绕与水平面垂直的旋转轴进行旋转,所述中环能够绕与水平面平行的旋转轴进行旋转,所述内环能够绕中环的纵向中心轴线旋转;所述偏移座椅框能够在内环上移动实现偏心。2.根据权利要求1所述的四轴运动仿真系统,其特征在于:所述外环采用开口朝上的u型结构,该开口朝上的u型结构的对称轴为外环的旋转轴线,该旋转轴线与水平面垂直,外环能够其旋转轴线进行旋转;所述外环包括两个竖直的竖直臂和与两个竖直臂的底部连接的水平的底部连接臂;所述中环采用封闭的o型结构,包括平行的左臂、右臂,平行的上臂、下臂,所述上臂、下臂与所述左臂、右臂均垂直;左臂、上臂、右臂、下臂依次连接围合呈o型结构;左臂、右臂的中心分别通过运动轴系与外环连接,左臂、右臂的中心的连线形成中环的旋转轴线,该旋转轴线与水平面平行,中环能够绕其旋转轴线进行旋转;上臂、下臂的中心的连线形成中环的纵向中心轴线;所述内环采用开口朝前的u型结构,包括平行的上连接臂、下连接臂和将两者连接起来的侧臂;内环的上连接臂、下连接臂分别通过运动轴系与中环的上臂、下臂连接,所述内环的旋转轴线与所述中环的纵向中心轴线位于同一条直线上,所述内环能够绕其旋转轴线进行旋转。3.根据权利要求2所述的四轴运动仿真系统,其特征在于:在所述偏移座椅框的后部的上方、下方分别设置有滑块;在内环的侧臂的上方、下方分别设置有滑道,滑块与滑道一一对应;所述偏移座椅框上方的滑块能够在内环的侧臂上方的滑道上往复移动;所述偏移座椅框下方的滑块能够在内环的侧臂下方的滑道上往复移动。4.根据权利要求3所述的四轴运动仿真系统,其特征在于:在每个所述滑道上均开有多个禁锢孔;每个禁锢孔的中心轴线与滑道的长度方向垂直;在每个禁锢孔内安装有禁锢螺栓。5.根据权利要求4所述的四轴运动仿真系统,其特征在于:所述滑道的长度方向上的中心与内环的旋转轴线对齐;当滑块的中心与滑道的中心对齐时,偏移座椅框架的对称轴线与内环的旋转轴线位于同一个铅锤面内,当滑块的中心与滑道的中心不对齐时,偏移座椅框架的对称轴线与内环的旋转轴线位于不同的铅锤面内。6.根据权利要求5所述的四轴运动仿真系统,其特征在于:在所述偏移座椅框架上设置有座椅、扶手、多组安全带、压肩和仪器箱。7.根据权利要求6所述的四轴运动仿真系统,其特征在于:所述系统进一步包括运动控制卡,其能够同步控制外环、中环、内环的驱动电机;同时,在外环、中环、内环的驱动电机上分别安装有光电编码器。
8.根据权利要求7所述的四轴运动仿真系统,其特征在于:所述系统进一步包括:三相断路器、动力投入开关和固态继电器,三者串联连接;同时,所述系统进一步包括:光栅传感器、被测人员急停按钮、操作人员急停按钮;光栅传感器、压肩、多组安全带的卡扣、被测人员急停按钮、操作人员急停按钮串联连接,并控制所述固态继电器;在所述底座的四个角落分别设置有光栅传感器;在仪器箱内还设置有措施使能开关,其与光栅传感器、压肩、多组安全带的卡扣、被测人员急停按钮并联。9.根据权利要求1所述的四轴运动仿真系统,其特征在于:在所述偏移座椅框架上与被测人员的头部等高位置处设置有六轴加速度传感器。10.根据权利要求1所述的四轴运动仿真系统,其特征在于:在所述底座的下方安装有支撑脚轮和能够调节高度的支撑地脚。
技术总结
本发明提供了一种四轴运动仿真系统,属于训练设备领域。该四轴运动仿真系统包括:底座、外环、中环、内环和偏移座椅框;所述外环安装在底座上,所述中环安装在外环上,所述内环安装在中环上,所述偏移座椅框安装在内环上;所述外环能够绕与水平面垂直的旋转轴进行旋转,所述中环能够绕与水平面平行的旋转轴进行旋转,所述内环能够绕中环的纵向中心轴线旋转;所述偏移座椅框能够在内环上移动实现偏心。本发明可自动控制三个轴精确地按照预定的速度、位置和时间运行,同时可以提供三个轴独立的精确位置,通过调节座椅水平位置实现偏心旋转,实现模拟单轴、多轴旋转、偏心旋转、以及复合运动,使训练更贴近实际。使训练更贴近实际。使训练更贴近实际。
技术研发人员:刘金 张春雷
受保护的技术使用者:北京航速科技有限公司
技术研发日:2020.11.11
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。