1.本发明涉及一种升降式路侧占道停车位用双杆闸机装置,该装置不仅实现路侧占道停车位自动管控、无人值守收费的原有功能和效果,而且可以实现闸杆自动升降、上下移动,自动适应不同车型的高度,有效管控每一车辆,有效管控停车逃费、漏费。
2.本发明属于智慧停车无人值守管控收费领域,适用于路侧占道顺停车位的自动管控、无人值守收费。
背景技术:
3.申请号为202020974552.3的专利申请了“一种路侧占道停车位用双杆闸机装置”,该系统虽然实现了实现路侧占道停车位的自动管控、无人值守收费,缺点是无法实现闸杆自动升降、上下移动,不能自动适应不同车型的高度,不能有效管控每一车辆,停车逃费、漏费严重。
技术实现要素:
4.本发明的目的在于提供一种升降式路侧占道停车位用双杆闸机装置,在申请号为202020974552.3“一种路侧占道停车位用双杆闸机装置”的基础上,增加闸杆自动升降装置,不仅实现了实现路侧占道停车位的自动管控、无人值守收费,而且实现闸杆自动升降、上下移动,自动适应不同车型的高度,有效管控每一车辆,有效管控停车逃费、漏费。
5.本发明解决其技术问题所采用的技术方案是:
6.本发明由双杆闸机装置、丝杆、丝杆电机、组合体、连接器、限位器a、限位器b、升降槽口构成;
7.丝杆的上端固定在双杆闸机装置的内壁顶部,丝杆的下端与丝杆电机的转轴刚性连接,丝杆电机固定在双杆闸机装置的底部,组合体固定在连接器上,连接器与丝杆通过螺纹穿透连接,限位器a安装在丝杆的上端头旁边,限位器b安装在丝杆的下端头旁边,双杆闸机装置的外壳侧面设有一升降槽口;
8.双杆闸机装置由左闸杆、右闸杆、左传动装置、右传动装置、左限位模块、右限位模块、信号处理控制模块、左车位感应模块、右车位感应模块、左电子显示屏、右电子显示屏、左红外线检测模块、右红外线检测模块、电源模块、外壳、太阳能电池模块、充电接口构成;
9.丝杆用于驱动连接器的自动升降、上下移动,从而实现组合体的自动升降、上下移动;
10.丝杆电机用于驱动丝杆,丝杆电机与双杆闸机装置的信号处理控制模块通过电缆连接;信号处理控制模块实时根据距离检测模块的闸杆与车辆高度信号,控制驱动丝杆电机动作;
11.组合体由双杆闸机装置的闸杆、闸杆电机、传动轴和闸杆限位器构成,在信号处理控制模块的控制下,用于实现闸杆的垂直状态到水平状态往返转动;
12.连接器用于连接组合体和丝杆;
13.限位器a、限位器b分别用于连接器和组合体的上升、下降限位;
14.升降槽口为组合体的上升、下降通道,用于组合体的上升、下降;
15.本发明的工作原理为:
16.车辆停入车位后,双杆闸机装置的信号处理控制模块,控制驱动组合体的闸杆电机动作,闸杆从垂直状态转动到水平状态;
17.双杆闸机装置的闸杆处于水平状态时,闸杆与车辆的高度自动高于设定的安全高度;同时,安装在双杆闸机装置闸杆上的距离检测模块,实时检测闸杆与车辆的高度;
18.双杆闸机装置的信号处理控制模块,实时根据闸杆与车辆的高度信号,控制驱动丝杆电机动作,当闸杆与车辆的高度超过设定的安全高度,丝杆电机动作,组合体下降;当闸杆与车辆的高度达到设定的安全高度,组合体停止下降,闸杆下降,适应性阻拦在车辆前部引擎盖上方,实现对车辆的阻挡控制;
19.缴纳停车费后,双杆闸机装置的信号处理控制模块,控制驱动丝杆电机动作,组合体上升,使闸杆自动处于设定的安全高度,车辆顺利离场;
20.双杆闸机装置的信号处理控制模块,控制驱动组合体的闸杆电机动作,闸杆从水平状态转动到垂直状态,使闸杆最后处于垂直状态。
21.本发明的优点和效果:通过本发明,不仅实现了实现路侧占道停车位的自动管控、无人值守收费,而且实现闸杆自动升降、上下移动,自动适应不同车型的高度,有效管控每一车辆,有效管控停车逃费、漏费。
附图说明
22.以下结合附图对本发明作详细描述。
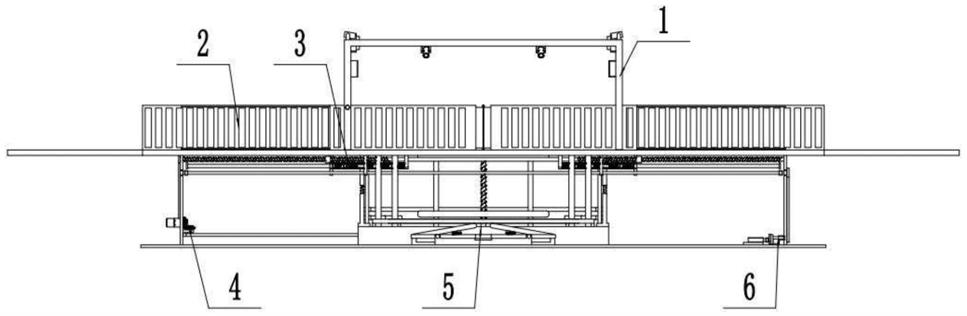
23.图1是本发明的构成示意图。
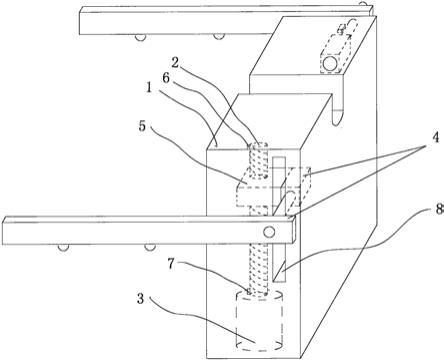
24.图中,1.双杆闸机装置,2.丝杆,3.丝杆电机,4.组合体,5.连接器,6.限位器a,7.限位器b,8.升降槽口。
具体实施方式
25.参照附图1,本发明由双杆闸机装置[1]、丝杆[2]、丝杆电机[3]、组合体[4]、连接器[5]、限位器a[6]、限位器b[7]、升降槽口[8]构成;
[0026]
丝杆[2]的上端固定在双杆闸机装置[1]的内壁顶部,丝杆[2]的下端与丝杆电机[3]的转轴刚性连接,丝杆电机[3]固定在双杆闸机装置[1]的底部,组合体[4]固定在连接器[5]上,连接器[5]与丝杆[2]通过螺纹穿透连接,限位器a[6]安装在丝杆[2]的上端头旁边,限位器b[7]安装在丝杆[2]的下端头旁边,双杆闸机装置[1]的外壳侧面设有一升降槽口[8];
[0027]
双杆闸机装置[1]由左闸杆、右闸杆、左传动装置、右传动装置、左限位模块、右限位模块、信号处理控制模块、左车位感应模块、右车位感应模块、左电子显示屏、右电子显示屏、左红外线检测模块、右红外线检测模块、电源模块、外壳、太阳能电池模块、充电接口构成;
[0028]
丝杆[2]用于驱动连接器[5]的自动升降、上下移动,从而实现组合体[4]的自动升降、上下移动;
[0029]
丝杆电机[3]用于驱动丝杆[2],丝杆电机[3]与双杆闸机装置[1]的信号处理控制模块通过电缆连接;信号处理控制模块实时根据距离检测模块的闸杆与车辆高度信号,控制驱动丝杆电机[3]动作;
[0030]
组合体[4]由双杆闸机装置[1]的闸杆、闸杆电机、传动轴和闸杆限位器构成,在信号处理控制模块的控制下,用于实现闸杆的垂直状态到水平状态往返转动;
[0031]
连接器[5]用于连接组合体和丝杆;
[0032]
限位器a[6]、限位器b[7]分别用于连接器[5]和组合体[4]的上升、下降限位;
[0033]
升降槽口[8]是组合体[4]的上升、下降通道,用于组合体[4]的上升、下降;
[0034]
本发明的工作原理为:
[0035]
车辆停入车位后,双杆闸机装置[1]的信号处理控制模块,控制驱动组合体[4]的闸杆电机动作,闸杆从垂直状态转动到水平状态;
[0036]
双杆闸机装置[1]的闸杆处于水平状态时,闸杆与车辆的高度自动高于设定的安全高度;同时,安装在双杆闸机装置[1]闸杆上的距离检测模块,实时检测闸杆与车辆的高度;
[0037]
双杆闸机装置[1]的信号处理控制模块,实时根据闸杆与车辆的高度信号,控制驱动丝杆电机[3]动作,当闸杆与车辆的高度超过设定的安全高度,丝杆电机[3]动作,组合体[4]下降;当闸杆与车辆的高度达到设定的安全高度,组合体[4]停止下降,闸杆下降,适应性阻拦在车辆前部引擎盖上方,实现对车辆的阻挡控制;
[0038]
缴纳停车费后,双杆闸机装置[1]的信号处理控制模块,控制驱动丝杆电机[3]动作,组合体[4]上升,使闸杆自动处于设定的安全高度,车辆顺利离场;
[0039]
双杆闸机装置[1]的信号处理控制模块,控制驱动组合体[4]的闸杆电机动作,闸杆从水平状态转动到垂直状态,使闸杆最后处于垂直状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。