1.本实用新型涉及一种智能运动控制系统,尤其是一种适用于大棚农机的智能运动控制系统。
背景技术:
2.随着标准化大棚的推广应用,棚内作业的直线度要求越来越高,单纯依靠驾驶员控制车辆实现直线行驶,效率低且精度差,难以满足要求。受制于大棚的遮挡,基于卫星定位的导航系统无法在大棚内使用,其他的室内导航定位方式要么成本高,要么精度不足,如何解决大棚内农机的智能运动,实成为农户和企业迫切的需要。
技术实现要素:
3.本实用新型的目的是克服现有技术中存在的不足,提供一种适用于大棚农机的智能运动控制系统,其能有效实现对大棚农机运动的控制,提高大棚农机运动的智能化程度,安全可靠。
4.按照本实用新型提供的技术方案,所述适用于大棚农机的智能运动控制系统,包括用于确定大棚农机在大棚内运动作业时偏移状态的横向偏移测量机构、用于操控大棚农机转向的电控转向装置以及用于控制大棚农机运动状态的运动控制器,横向偏移测量机构、电控转向装置与运动控制器电连接;
5.所述横向偏移测量机构包括设置于大棚每个地头的地头激光发射机构以及与地头激光发射机构适配的激光标靶,所述激光标靶设置于大棚农机上,激光标靶同时接收两个地头激光发射机构所发射的地头激光束,运动控制器根据激光标靶所接收的地头激光束确定大棚农机运动作业时的横向偏移量。
6.所述地头激光发射机构包括地头激光支架以及若干设置于地头激光支架上的地头激光发射器;
7.对于大棚地头的两个地头激光发射机构,地头激光支架上的一地头激光发射器能与另一地头激光支架上的地头激光发射器呈一一正对应;大棚农机在任意两个地头激光发射器间直线运动时,任一地头激光发射器发射的地头激光束配置为照射在激光标靶的中心。
8.所述激光标靶包括激光标靶座以及至少两个设置于激光标靶座上的激光束接收感应体,所述两个激光束接收感应体分别与大棚农机的车头与车尾对应;
9.大棚农机在任意两个正对应的地头激光发射器间运动时,激光标靶座上的激光束接收感应体与所述两个地头激光发射器正对应,以通过激光束接收感应体同时接收两个地头激光发射器所发射的地头激光束。
10.在大棚内设置大棚农机运动作业调头用的地头调头通道时,所述激光标靶包括激光标靶座以及至少四个设置于所述激光标靶座上的激光束接收感应体,其中,四个激光束接收感应体分别与大棚农机的车头、车尾以及车身的侧面相对应;
11.还包括适配安装于地头调头通道端部的调头通道支架以及装配于所述调头通道支架上的通道激光发射器,激光标靶通过相应的激光束接收感应体接收通道激光发射器发射的通道激光束和/或地头激光发射器发射的地头激光束;
12.同时接收到通道激光束与地头激光束时,激光标靶根据通道激光束确定通道激光信息以及根据地头激光束确定地头激光信息,并将所确定的通道激光信息以及地头激光信息传输至运动控制器内。
13.还包括用于获取大棚农机在大棚内位置信息的棚内粗定位装置以及用于调节大棚农机行驶速度的电子油门装置,所述棚内粗定位装置以及电子油门装置与运动控制器电连接;
14.棚内粗定位装置将所获取大棚农机的棚内位置信息实时传输至运动控制器内,运动控制器根据所接收的棚内位置信息通过电控转向装置和/或电子油门装置控制大棚农机在大棚内的行驶,以辅助控制大棚农机在大棚内的运动作业。
15.所述棚内粗定位装置包括设置于大棚农机上的uwb移动信标以及若干与所述uwb移动信标适配的uwb固定信标,所述uwb固定信标固定安装于大棚内,uwb移动信标与运动控制器电连接,uwb固定信标在大棚内的数量不少于3个。
16.还包括设置于大棚农机上的激光测距仪,所述激光测距仪以及电子油门装置均与运动控制器电连接;
17.利用激光测距仪测量大棚农机的车头与前方物体之间的距离,当所测量的距离与运动控制器内预设的减速距离阈值匹配时,运动控制器通过电子油门装置降低大棚农机的行驶速度。
18.还包括用于检测大棚农机运动作业过程的车身姿态信息的车身姿态检测传感器,所述车身姿态检测传感器与运动控制器电连接,以将所检测大棚农机运动作业过程中的车身姿态信息传输至运动控制器内。
19.所述激光束接收感应体包括感光面板以及若干均匀分布于感光面板上的感光元件,通过感光元件能接收通道激光发射器发射的通道激光束或地头激光发射器发射的地头激光束,所述感光元件与运动控制器电连接。
20.所述激光束接收感应体包括感应幕布、采集感应幕布图像信息的ccd图像传感器以及用于连接感应幕布与ccd图像传感器的感应暗室(18),ccd图像传感器与运动控制器电连接;
21.通过感应幕布接收通道激光发射器发射的通道激光束或地头激光发射器发射的地头激光束,ccd图像传感器采集感应幕布的图像信息,并将所采集感应幕布的图像信息传输至运动控制器内。
22.本实用新型的优点:运动控制器通过电子转向装置、电子油门装置与大棚农机适配电连接,通过横向偏移量测量机构能测量大棚农机在直线运动作业过程中的横向偏移量,通过电子转向装置控制大棚农机的转向,以能消除大棚农机直线运动作业过程中的横向偏移,确保大棚农机在运动作业中的稳定性与可靠性;通过调头通道激光器与激光标靶配合、通过激光测距仪、车身姿态检测传感器和/或棚内粗定位装置与运动控制器配合,以能对大棚农机在大棚内的运动位置进行更为准确的控制,提高大棚农机运动的智能化程度,安全可靠。
附图说明
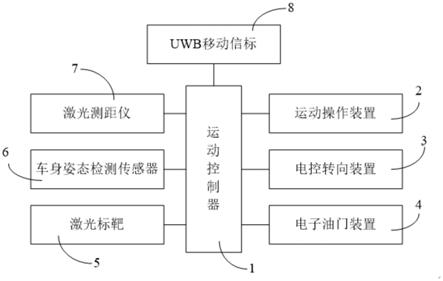
23.图1为本实用新型的结构框图。
24.图2为本实用新型利用地头激光发射机构修正大棚农机行驶状态的示意图。
25.图3为本实用新型利用地头激光发射机构以及通道激光发射器控制大棚农机行驶状态的示意图。
26.图4为本实用新型利用地头激光发射机构、通道激光发射器以及棚内粗定位装置控制大棚农机行驶状态的示意图。
27.图5为本实用新型激光束接收感应体的一种实施状态示意图。
28.图6为本实用新型激光束接收感应体的另一种实施状态示意图。
29.附图标记说明:1-运动控制器、2-运动操作装置、3-电控转向装置、4-电子油门装置、5-激光标靶、6-车身姿态检测传感器、7-激光测距仪、8-uwb移动信标、9-大棚农机、10-地头激光支架、11-地头激光发射器、12-调头通道支架、13-uwb固定信标、14-座体内支架、15-感光面板、16-感光元件、17-感应幕布、18-感应暗室、19-ccd图像传感器、20-激光发射控制器以及21-通道激光发射器。
具体实施方式
30.下面结合具体附图和实施例对本实用新型作进一步说明。
31.如图1所示:为了能有效实现对大棚农机运动的控制,提高大棚农机运动的智能化程度,本实用新型包括用于确定大棚农机9在大棚内运动作业时偏移状态的横向偏移测量机构、用于操控大棚农机9转向的电控转向装置3以及用于控制大棚农机9运动状态的运动控制器1,横向偏移测量机构、电控转向装置3与运动控制器1电连接;
32.所述横向偏移测量机构包括设置于大棚每个地头的地头激光发射机构以及与地头激光发射机构适配的激光标靶5,所述激光标靶5设置于大棚农机9上,激光标靶5同时接收两个地头激光发射机构所发射的地头激光束,运动控制器1根据激光标靶5所接收的地头激光束确定大棚农机9运动作业时的横向偏移量,且根据所确定的横向偏移量通过电控转向装置3控制大棚农机9进行所需的转向,以将大棚农机9实时修正至所需的行驶状态。
33.具体地,大棚农机9为可以在大棚内进行运动作业的器械,大棚农机9具体可以采用所需的结构形式,具体在大棚内运动作业的形式与大棚内作物的具体分布情况相关。具体实施时,大棚农机9在大棚内运动作业,具体与大棚农机9运动作业的形式以及大棚作物的种类相关,可以根据实际需要选择,以能满足对大棚内作物的运动作业为准,具体为本技术领域人员所熟知,此处不再赘述。
34.本实用新型实施例中,横向偏移测量机构与运动控制器1电连接,同时,运动控制器1与大棚农机9的电控转向装置3电连接,通过电控转向装置3可控制大棚农机9的转向。电控转向装置3可以采用电机驱动方向轴转动实现大棚农机9的转向,电控转向装置3控制大棚农机9的转向可与现有汽车等转向控制过程相似,如通过控制大棚农机9的转向,能使得大棚农机9向靠近某一位置行驶、大棚农机9在大棚内保持直线行驶或实现大棚农机9的转弯与调头等,即通过电控转向装置3能实现对大棚农机9运动作业状态的调节,电控转向装置3与大棚农机9配合并控制大棚农机9转向的具体实施形式可以根据实际需要选择,为本技术领域人员所熟知,此处不再赘述。运动控制器1可以采用现有常用的微处理器,具体形
式可以根据实际需要选择。
35.一般地,当大棚农机9在大棚内运动作业时,需要保证稳定沿着垄的长度方向运动,以确保运动作业时的稳定性与可靠性。为了达到大棚农机9运动作业时的稳定性与可靠性,本实用新型实施例中,通过横向偏移测量机构能实时测量大棚农机9运动作业时的横向偏移量。
36.本实用新型实施例中,横向偏移测量机构包括地头激光发射机构以及激光标靶5,其中,地头激光发射机构分布于每个地头,激光标靶5安装于大棚农机9上,即激光标靶5能跟随大棚农机9同步运动,地头激光发射机构一般为两个,分布于大棚长度方向的两端。地头激光发射机构上安装有若干激光发射器,激光发射器的数目与拟作业的行数相等,且激光发射器发射的激光束与拟作业的路线重合,两个地头激光发射机构同时发射地头激光束,通过激光标靶5能同时接收两个地头激光发射机构发射的地头激光束。
37.一般地,两个地头激光发射机构所发射的地头激光束呈正对应,激光标靶5同时接收两个地头激光束后,运动控制器1根据同时接收两个地头激光束的入射位置状态等可确定大棚农机9运动作业时的横向偏移量。为了能消除所确定的横向偏移量,运动控制器1通过电控转向装置3控制大棚农机9转向,直至转向后使得横向偏移量保持在所允许的偏移量阈值范围内,达到实时修正大棚农机9行驶状态的目的,确保利用大棚农机9进行运动作业时的稳定性与可靠性。具体实施时,在确定横向偏移量后,运动控制器1可通过本技术领域常用的技术手段通过通过电控转向装置3控制大棚农机9转向,具体控制电控转向装置3控制大棚农家9转向的方式以及过程为本技术领域人员所熟知,此处不再赘述。
38.具体实施时,允许的偏移量阈值具体与大棚农机9运动作业形式有关,以不影响大棚农机9实际运动作业的可靠性为准,具体为本技术领域人员所熟知,即可以根据需要选择或设置,此处不再赘述。
39.如图2所示,所述地头激光发射机构包括地头激光支架10以及若干设置于地头激光支架10上的地头激光发射器11;
40.对于大棚地头的两个地头激光发射机构,地头激光支架10上的一地头激光发射器11能与另一地头激光支架10上的地头激光发射器11呈一一正对应;大棚农机9在任意两个地头激光发射器11间运动时,任一地头激光发射器11发射的地头激光束配置为照射在激光标靶5的中心;
41.地头激光发射器11由pwm驱动,每个地头激光发射器11的pwm频率及占空比不同,根据激光标靶5所接收的地头激光束确定大棚农机9所行驶的位置状态以及大棚农机9运动作业时的横向偏移量。
42.本实用新型实施例中,地头激光发射机构包括地头激光支架10,地头激光支架10固定安装于大棚的一地头,地头激光发射器11固定安装于地头激光支架10上,地头激光支架10以及地头激光发射器11均可以根据需要选择所需的形式,此处不再赘述。
43.具体实施时,对于两个地头激光发射机构,地头激光支架10上设置的地头激光发射器11数量相一致;同时,一地头激光支架10上的地头激光发射器11与另一地头激光支架10上相应的地头激光发射器11呈一一正对应,即两个正对应地头激光发射器11所发射的地头激光束可完全重合。地头激光支架10上地头激光发射器11的数量与大棚农机9在大棚内运动作业的形式相关,具体可以参考上述说明,即只要确定了大棚农机9在大棚内的运动作
业形式,即可能确定地头激光支架10上地头激光发射器11的数量以及相应的分布。
44.一般地,大棚地头的两个地头激光发射机构内的地头激光发射器11均由同一激光发射控制器20控制,激光发射控制器20可以采用现有常用的形式,以能控制地头激光器11的工作为准,具体为本技术领域人员所熟知,此处不再赘述。具体工作时,通过激光发射控制器20需要控制与大棚农机9正对应的两个地头激光发射器11处于工作状态,即能满足利用地头激光发射器11所发射的地头激光束与大棚农机9上的激光标靶5配合检测横向偏移量。与大棚农机9非对应状态下的地头激光发射器11可以处于关闭状态或间歇工作状态,具体可以根据需要选择。当然,激光发射控制器20可以使得所有地头激光发射器11始终处于发射地头激光束的状态。本实用新型实施例中,激光发射器由pwm驱动,每个地头激光发射器11的pwm频率及占空比不同,由激光标靶5检测后可知当前发射地头激光束相应地头激光发射器11的编号标号,进而得知大棚农机9所在的行驶位置。
45.具体实施时,大棚农机9在任意正对应的两个地头激光发射器11间运动时,任一地头激光发射器11发射的地头激光束配置为入射到激光标靶5的中心。由上述说明可知,当两个正对应地头激光发射器11所发射的地头激光束配置为入射到激光标靶5的中心后,当大棚农机9在设置的轨迹上运动作业时,两个地头激光束会始终入射到激光标靶5的中心。当大棚农机9运动过程中出线偏移时,则至少存在一个地头激光发射器11的地头激光束会偏离激光标靶5的中心,根据地头激光束入射在激光标靶5上的偏移情况,即可确定大棚农机9的横向偏移量。
46.进一步地,所述激光标靶5包括激光标靶座以及至少两个设置于激光标靶座上的激光束接收感应体,所述两个激光束接收感应体分别与大棚农机9的车头与车尾对应;
47.大棚农机9在任意两个正对应的地头激光发射器11间运动时,激光标靶座上的激光束接收感应体与所述两个地头激光发射器11正对应,以通过激光束接收感应体同时接收两个地头激光发射器11所发射的地头激光束。
48.本实用新型实施例中,激光标靶5包括激光标靶座,通过激光标靶座能将激光标靶5安装在大棚农机9的车顶。当仅需控制大棚农机9在任意两个正对应的地头激光器11之间运动作业时,在激光标靶座上可只设置两个激光束接收感应体,此时,两个激光束接收感应体分别与大棚农机9的车头与车尾分别对应。
49.当大棚农机9在任意两个正对应的地头激光发射器11间运动作业时,利用所述两个激光束接收感应体能同时接收与大棚农机9正对应的两个地头激光发射器11所发射的地头激光束,根据地头激光束入射到激光束接收感应体的位置,能确定大棚农机9在运动作业时的横向偏移量。
50.如图3所示,在大棚内设置大棚农机9运动作业调头用的地头调头通道时,所述激光标靶5包括激光标靶座以及至少四个设置于所述激光标靶座上的激光束接收感应体,其中,四个激光束接收感应体分别与大棚农机9的车头、车尾以及车身的侧面相对应;
51.还包括适配安装于地头调头通道端部的调头通道支架12以及装配于所述调头通道支架12上的通道激光发射器21,激光标靶5通过相应的激光束接收感应体接收通道激光发射器21发射的通道激光束和/或地头激光发射器11发射的地头激光束;
52.同时接收到通道激光束与地头激光束时,激光标靶5根据通道激光束确定通道激光信息以及根据地头激光束确定地头激光信息,并将所确定的通道激光信息以及地头激光
信息传输至运动控制器1内;
53.运动控制器1根据所接收通道激光信息以及地头激光信息通过电控转向装置3控制大棚农机9调头。
54.本实用新型实施例中,当大棚内存在地头调头通道,且需要控制大棚农机9在大棚内实现调头等多种情况的运动作业时,所述激光标靶5的激光标靶座上要设置四个激光束接收感应体,其中,激光标靶座上的四个激光束接收感应体能分别与大棚农机9的车头、车尾以及车身的两个侧面相对应。当大棚农机9沿垄的长度方向运动时,可以利用与大棚农机9车头、车尾相对应的激光束接收感应体同时接收两个正对应地头激光发射器11发射的地头激光束。当然,大棚农机9在地头调头通道调头时,可以利用与大棚农机9车身侧面相对应的激光束接收感应体能同时接收两个正对应地头激光发射器11所发射的地头激光束,此时,可利用与大棚农机9车头或车尾对应的激光束接收感应体接收通道激光束。大棚内地头调头通道的数量可以根据需要选择,一般地,地头调头通道的长度方向与大棚内垄的长度方向垂直。
55.为了能实现对大棚农机9调头时的导引,在任一地头调头通道均设置调头通道支架12,调头通达支架12可以位于地头调头通道的任一端,具体可以根据需要选择,此处不再赘述。在调头通道支架12上设置通道激光发射器21,通道激光发射器21可以采用现有常用的形式,具体可以根据实际需要选择。具体实施时,当大棚农机9在地头调头通道内行驶时,通道激光发射器21所发射的通道激光束也配置为经过激光标靶5的中心,即当激光标靶5的任一激光束接收感应体与通道激光发射器21正对应,通道激光发射器21所发射的通道激光束经过正对应的激光束接收感应体的中心。当然,当与通道激光发射器21对应的激光束接收感应体存在偏移时,则通道激光发射器21所发射的通道激光束会入射到激光束接收感应体相应的位置,此时,可以确定大棚农机9在地头调头通道的行驶情况。
56.具体实施时,通道激光发射器21的具体情况可与地头激光发射器11的具体情况相一致,如通道激光发射器21也由pwm信号驱动,地头激光发射器11、通道激光发射器21中相应的pwm信号的频率以及占空比均不相同,从而能被激光标靶5检测并确认所发射激光束的地头激光发射器11或通道激光发射器21。
57.通道激光发射器21所发射的通道激光束可以为可见光或不可见光,具体可以根据实际需要选择;当然,地头激光发射器11所发射的地头激光束也可以为可见光或不可见光。一般地,通道激光束与地头激光束相互垂直。通道激光发射器21的工作状态也可以由激光发射控制器20控制,即可通过激光发射控制器20控制通道激光发射器21处于工作状态或非工作状态。
58.当激光标靶座上同时设置四个激光束接收感应体时,激光标靶5通过相应的激光束接收感应体接收通道激光发射器21发射的通道激光束和/或地头激光发射器11发射的地头激光束,激光标靶5接收通道激光束、地头激光束的具体情况与大棚农机9在大棚里的行驶位置相关。如当大棚农机9行驶到通道激光束与地头激光束交叉的位置区域时,由激光标靶5检测后可知由当前照射激光束相应的状态,进而得知大棚农机9所在的运动位置。激光标靶5可以同时接收通道激光束以及地头激光束,否则,激光标靶5仅会接收地头激光束。
59.本实用新型实施例中,当激光标靶5通过激光束接收感应体同时接收到通道激光束以及地头激光束时,激光标靶5会将同时接收到的通道激光信息以及地头激光信息传输
至运动控制器1内。运动控制器1根据通道激光信息以及地头激光信息,即可确定需要控制大棚农机9进行调头,以便进行下一垄的运动作业。
60.具体地,由于地头激光发射器11的安装位置固定,可以将地头激光发射器11与地头通道之间的距离预设于运动控制器1内。大棚农机9行驶至地头调头通道后,运动控制器1可以通过电控转向装置3控制大棚农机9转向,如将大棚农机9的车头或车尾方向与地头调头通道正对应,然后运动控制器1控制大棚农机9在地头调头通道内继续行驶,在行驶后,如再次同时接收到通道激光信息以及地头激光信息时,则运动控制器1通过电控转向装置3控制大棚农机9转向,以在转向后能与大棚内的一垄正对应或一垄间区域正对应。此后,利用与大棚农机9车头、车位相对应的激光束接收感应体同时接收正对应地头激光发射器11所发射的地头激光束,利用地头激光束能实时测量大棚农机9的横向偏移量,具体测量横向偏移量的过程以及在得到横向偏移量后控制大棚农机9运动作业的过程均参考上述说明,此处不再赘述。
61.如图5所示,所述激光束接收感应体包括感光面板15以及若干均匀分布于感光面板15上的感光元件16,通过感光元件16能接收通道激光发射器21发射的通道激光束或地头激光发射器11发射的地头激光束,所述感光元件16与运动控制器1电连接。
62.具体地,图5中示出了激光束接收感应体的一种实施情况,感应元件16可以采用现有常用的形式,以能满足对激光束的感应为准,具体为本技术领域人员所熟知,此处不再赘述。感应元件16在感光面板15上呈阵列分布,具体阵列分布的情况可以根据实际需要选择。一般地,激光标靶座可以呈方形,激光标靶座内还可以设置座体内支架14,利用座体内支架14能提高激光标靶座的强度,激光标靶座的形状以及座体内支架14与激光标靶座的连接配合均可以根据实际需要选择,此处不再赘述。
63.具体实施时,对于每个感光面板15上的感光元件16均分配一独立的位置标号,对同一个感光面板15上的感光元件16,各个感光元件16的相互位置关系根据阵列分布关系能精确配置。因此,在任一感光元件16接收到激光束后,运动控制器1即可能确定激光束入射的位置信息。如入射的激光束为地头激光束时,运动控制器1根据所确定的地头激光束的入射位置信息能实现横向偏移量的确定。
64.如图6所示,所述激光束接收感应体包括感应幕布17、采集感应幕布17图像信息的ccd(charge-coupled device)图像传感器19以及用于连接感应幕布17与ccd图像传感器19的感应暗室18,ccd图像传感器19与运动控制器1电连接;
65.通过感应幕布17接收通道激光发射器21发射的通道激光束或地头激光发射器11发射的地头激光束,ccd图像传感器19采集感应幕布17的图像信息,并将所采集感应幕布17的图像信息传输至运动控制器1内。
66.具体地,图6中示出了激光束接收感应体的另一种实施情况,感应幕布17、感应暗室18以及ccd图像传感器19均可以采用现有常用的形式,具体可以根据实际需要选择。ccd图像传感器19的视场完全覆盖感应幕布17,当有激光入射到感应幕布17上时,利用ccd图像传感器19能采集感应幕布17具有激光入射时的图像。具体实施时,可以对ccd图像传感器19采集感应幕布17的图像进行标定,从而在激光束入射到感应幕布17不同的区域位置时,根据ccd图像传感器19的图像能精确确定激光束入射到感应幕布17的位置,即运动控制器1能精确得到激光束入射到感应幕布17的位置信息,根据确定的激光束位置信息,可以直接得
到横向偏移量等信息。
67.具体实施时,可以采用本技术领域常用的技术手段能对ccd图像传感器19采集感应幕布17的图像标定,具体标定方式以及过程为本技术领域人员所熟知,此处不再赘述。当然,具体实施时,激光束接收感应体还可以采用其他任意的形式,具体可以根据实际需要选择,此处不再赘述。
68.进一步地,还包括用于获取大棚农机9在大棚内位置信息的棚内粗定位装置以及用于调节大棚农机9行驶速度的电子油门装置4,所述棚内粗定位装置以及电子油门装置4与运动控制器1电连接;
69.棚内粗定位装置将所获取大棚农机9的棚内位置信息实时传输至运动控制器1内,运动控制器1根据所接收的棚内位置信息通过电控转向装置3和/或电子油门装置4控制大棚农机9在大棚内的行驶状态,以辅助控制大棚农机9在大棚内的运动作业。
70.本实用新型实施例中,电子油门装置4可以采用现有常用的形式,具体为本技术领域人员熟知,此处不再赘述。通过电子油门装置4能对大棚农机9的行驶速度进行调节或控制,如实现大棚农机9运动作业时的加速、减速或匀速行驶,具体通过电子油门装置4控制大棚农机9行驶状态的方式等均可根据需要选择,为本技术领域人员所熟知,此处不再赘述。辅助控制大棚农机9在大棚内的运动作业,具体是指辅助大棚农机9进入激光光路以及在激光失效或脱靶时的运动。激光光路具体是指地头激光发射机构以及通道激光发射器21产生的激光光路,激光失效或脱靶具体是指地头激光发射机构以及通道激光发射器21处于失效状态,或者地头激光发射机构以及通道激光发射器21所发射的激光束不能入射到检测标靶5上。
71.进一步地,还包括设置于大棚农机9上的激光测距仪7,所述激光测距仪7以及电子油门装置4均与运动控制器1电连接;
72.利用激光测距仪7测量大棚农机9的车头与前方物体之间的距离,当所测量的距离与运动控制器1内预设的减速距离阈值匹配时,运动控制器1通过电子油门装置4降低大棚农机9的行驶速度。
73.本实用新型实施例中,激光测距仪7可以采用现有现有常用的形式,激光测距仪7一般装配于大棚农机9的车头,即利用激光测距仪7能测量与前方物体之间的距离,利用激光测距仪7实现距离测定的方式以及过程均可与现有相一致,为本技术领域人员所熟知,此处不再赘述。
74.当在大棚农机9上设置激光测距仪7后,可利用激光测距仪7检测与地头激光支架10之间的距离,根据所测量与地头激光支架10之间的距离,能对大棚农机9调头等过程进行控制,提高大棚农机9调头时的可靠性。当然,还可以利用激光测距仪7确定大棚农机9在行驶时,与前方物体之间的距离,从而为大棚农机9的运动作业安全性提供保障,避免大棚农机9撞上障碍物等情况发生。
75.具体实施时,在运动控制器1内还可以预先设置一减速距离阈值,减速距离阈值的大小具体可以根据实际需要选择。当利用激光测距仪7测量的距离匹配时,运动控制器1可以通过电子油门装置4对大棚农机9的行驶速度减速。测量的距离与减速距离阈值匹配,一般是指测量距离不大于减速距离阈值。
76.进一步地,还包括用于检测大棚农机9运动作业过程的车身姿态信息的车身姿态
检测传感器6,所述车身姿态检测传感器6与运动控制器1电连接,以将所检测大棚农机9运动作业过程中的车身姿态信息传输至运动控制器1内;
77.在接收到车身姿态信息后,运动控制器1通过电控转向装置3控制大棚农机9进行所需的转向,以实时修正大棚农机9在大棚内运动作业的行驶状态。
78.本实用新型实施例中,车身姿态传感器6可以采用现有常用的形式,如可以采用陀螺仪等,具体可以根据需要选择。车身姿态传感器6安装于大棚农机9上,并与运动控制器1电连接。
79.具体地,当大棚农机9直线行进时,通过车身姿态传感器6能实时获取大棚农机的偏航信息,并将获取的偏航信息传输至运动控制器1内。因此,即使地头激光发射器11发射的地头激光束短暂丢失,或车辆瞬间偏移较大造成地头激光束脱靶时,由车身姿态传感器6提供车辆偏航信息,运动控制器1根据所述偏航信息通过电控转向机构3大棚农机9转向,以消除所述大棚农机9行驶中的偏航状态,保证大棚农机9回到正常的直线运动作业。
80.如图3所示,所述棚内粗定位装置包括设置于大棚农机9上的uwb移动信标8以及若干与所述uwb移动信标8适配的uwb固定信标13,所述uwb固定信标13固定安装于大棚内,uwb移动信标8与运动控制器1电连接;
81.通过uwb移动信标8与uwb固定信标13配合,运动控制器1能确定大棚农机9的棚内位置信息。
82.本实用新型实施例中,uwb(ultra wide band)固定信标13一般uwb固定信标13的数量不小于3个,即大于等于3个;uwb固定信标13分布于大棚作业区域的四周,uwb固定信标13采用电池供电。当将uwb固定信标13固定在大棚作业区域的四周后,即可确定uwb固定信标13的坐标位置。uwb移动信标8设置于大棚农机9的车顶,uwb移动信标8能跟随大棚农机9运动,uwb移动信标8与uwb固定信标13间具体通讯配合与现有相一致,利用uwb移动信标8与uwb固定信标13之间的通讯,能准确获得大棚农机9在大棚内的空间位置,具体利用uwb移动信标8以及uwb固定信标13实现大棚农机9在大棚内定位的方式与现有相一致,为本技术领域人员所熟知,此处不再赘述。
83.具体实施时,运动控制器1根据uwb移动信标8与uwb固定信标13间配合确定大棚农机9在大棚内的空间位置后,即可通过电控转向机构3引导大棚农机9在大棚内的运动,如将大棚农机9快速引导至所需的地头激光发射器11相对应的运动作业位置。
84.具体工作时,可以利用激光标靶5与地头激光发射机构以及通道激光发射机构配合,实现对uwb移动信标8测量的位置信息以及车身姿态检测传感器6检测的偏航信息校准,如激光标靶5同时接收到地头激光束以及通道激光束时,此时,大棚农机9的位置可以对利用uwb移动信标8测量的位置校准。
85.此外,当利用uwb移动信标8测出大棚农机9快要行进至地头或大大棚农机9在地头调头通道内要行进至某一垄时,会反馈至运动控制器1,运动控制器1通过电子油门装置4能降低大棚农机9的行驶速度,然后,在通过电控转向装置3使得大棚农机9按预定轨迹转向,车身姿态检测传感器6输出的偏航角用来调节大棚农机9进行精确地90
°
转向,实现换垄作业,直至作业完成。棚内粗定位装置采用uwb移动信标8与uwb固定信标13通讯配合时,可解决大棚内的定位,定位精度高,部署方便,降低维护成本,安全可靠。
86.当在地头激光发射机构和/或通道激光发射机构处于故障状态,或者大棚农机9产
生大的位移导致与激光标靶5脱靶时,运动控制器1利用uwb移动信标8测得的位置信息和车身姿态检测传感器6检测的偏航信息可引导大棚农机9继续作业,即进而控制大棚农机9在大棚内运动作业的行驶状态,即确保大棚农机9在运动作业过程的稳定性与可靠性。
87.此外,运动控制器1还可以与运动操作装置2电连接,运动操作装置2可以采用开关等形式,通过运动操作装置2能关闭运动控制器1对大棚农机9的运动控制,如关闭通过电控转向装置3对大棚农机9的转向控制,以及通过电子油门装置4对大棚农机9的加速或减速等。当然,还可以通过运动操作装置2能显示或指示运动控制器1对大棚农机9的控制状态,运动操作装置2可采用led指示灯或led显示屏等形式实现对具体状态的显示,具体可以根据实际需要选择,此处不再赘述。
88.具体实施时,可以根据大棚农机9在大棚内的运动作业情况,具体选择设置激光测距仪7、车身姿态检测传感器6以及棚内粗定位装置。当同时设置激光测距仪7、车身姿态检测传感器6以及棚内粗定位装置后,对大棚农机9在大棚内的运动作业更为智能控制。对一确定的大棚,地头激光支架10、设置于地头激光支架10上的地头激光发射器11、调头通道支架12、设置于调头通道支架12上的调头通道激光器21、uwb固定信标13等的具体分布位置等均能确定得到,因此,可以通过横向偏移量测量机构、激光测距仪7、车身姿态检测传感器6以及棚内粗定位装置与运动控制器1配合,能有效取定大棚农机9在运动作业时的位置,运动控制器1通过电子转向装置3和/或电子油门装置4与大棚农机9配合,以能实现大棚农机9的直线运动作业,以及大棚农机9在大棚内的调头、转弯等运动控制,即可实现大棚农机9在运动过程的全自动化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
