技术特征:
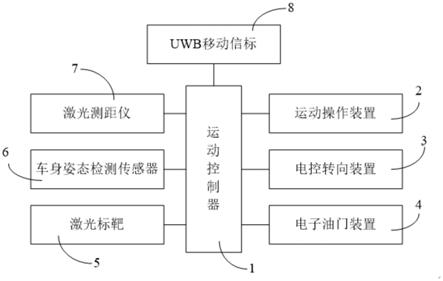
1.一种适用于大棚农机的智能运动控制系统,其特征是:包括用于确定大棚农机(9)在大棚内运动作业时偏移状态的横向偏移测量机构、用于操控大棚农机(9)转向的电控转向装置(3)以及用于控制大棚农机(9)运动状态的运动控制器(1),横向偏移测量机构、电控转向装置(3)与运动控制器(1)电连接;所述横向偏移测量机构包括设置于大棚每个地头的地头激光发射机构以及与地头激光发射机构适配的激光标靶(5),所述激光标靶(5)设置于大棚农机(9)上,激光标靶(5)同时接收两个地头激光发射机构所发射的地头激光束,运动控制器(1)根据激光标靶(5)所接收的地头激光束确定大棚农机(9)运动作业时的横向偏移量。2.根据权利要求1所述的适用于大棚农机的智能运动控制系统,其特征是:所述地头激光发射机构包括地头激光支架(10)以及若干设置于地头激光支架(10)上的地头激光发射器(11);对于大棚地头的两个地头激光发射机构,地头激光支架(10)上的一地头激光发射器(11)能与另一地头激光支架(10)上的地头激光发射器(11)呈一一正对应;大棚农机(9)在任意两个地头激光发射器(11)间直线运动时,任一地头激光发射器(11)发射的地头激光束配置为照射在激光标靶(5)的中心。3.根据权利要求2所述的适用于大棚农机的智能运动控制系统,其特征是:所述激光标靶(5)包括激光标靶座以及至少两个设置于激光标靶座上的激光束接收感应体,所述两个激光束接收感应体分别与大棚农机(9)的车头与车尾对应;大棚农机(9)在任意两个正对应的地头激光发射器(11)间运动时,激光标靶座上的激光束接收感应体与所述两个地头激光发射器(11)正对应,以通过激光束接收感应体同时接收两个地头激光发射器(11)所发射的地头激光束。4.根据权利要求2所述的适用于大棚农机的智能运动控制系统,其特征是:在大棚内设置大棚农机(9)运动作业调头用的地头调头通道时,所述激光标靶(5)包括激光标靶座以及至少四个设置于所述激光标靶座上的激光束接收感应体,其中,四个激光束接收感应体分别与大棚农机(9)的车头、车尾以及车身的侧面相对应;还包括适配安装于地头调头通道端部的调头通道支架(12)以及装配于所述调头通道支架(12)上的通道激光发射器(21),激光标靶(5)通过相应的激光束接收感应体接收通道激光发射器(21)发射的通道激光束和/或地头激光发射器(11)发射的地头激光束;同时接收到通道激光束与地头激光束时,激光标靶(5)根据通道激光束确定通道激光信息以及根据地头激光束确定地头激光信息,并将所确定的通道激光信息以及地头激光信息传输至运动控制器(1)内。5.根据权利要求1至4任一项所述的适用于大棚农机的智能运动控制系统,其特征是:还包括用于获取大棚农机(9)在大棚内位置信息的棚内粗定位装置以及用于调节大棚农机(9)行驶速度的电子油门装置(4),所述棚内粗定位装置以及电子油门装置(4)与运动控制器(1)电连接;棚内粗定位装置将所获取大棚农机(9)的棚内位置信息实时传输至运动控制器(1)内,运动控制器(1)根据所接收的棚内位置信息通过电控转向装置(3)和/或电子油门装置(4)控制大棚农机(9)在大棚内的行驶,以辅助控制大棚农机(9)在大棚内的运动作业。6.根据权利要求5所述的适用于大棚农机的智能运动控制系统,其特征是:所述棚内粗
定位装置包括设置于大棚农机(9)上的uwb移动信标(8)以及若干与所述uwb移动信标(8)适配的uwb固定信标(13),所述uwb固定信标(13)固定安装于大棚内,uwb移动信标(8)与运动控制器(1)电连接,uwb固定信标(13)在大棚内的数量不少于3个。7.根据权利要求5所述的适用于大棚农机的智能运动控制系统,其特征是:还包括设置于大棚农机(9)上的激光测距仪(7),所述激光测距仪(7)以及电子油门装置(4)均与运动控制器(1)电连接;利用激光测距仪(7)测量大棚农机(9)的车头与前方物体之间的距离,当所测量的距离与运动控制器(1)内预设的减速距离阈值匹配时,运动控制器(1)通过电子油门装置(4)降低大棚农机(9)的行驶速度。8.根据权利要求1至4任一项所述的适用于大棚农机的智能运动控制系统,其特征是:还包括用于检测大棚农机(9)运动作业过程的车身姿态信息的车身姿态检测传感器(6),所述车身姿态检测传感器(6)与运动控制器(1)电连接,以将所检测大棚农机(9)运动作业过程中的车身姿态信息传输至运动控制器(1)内。9.根据权利要求3或4所述的适用于大棚农机的智能运动控制系统,其特征是:所述激光束接收感应体包括感光面板(15)以及若干均匀分布于感光面板(15)上的感光元件(16),通过感光元件(16)能接收通道激光发射器(21)发射的通道激光束或地头激光发射器(11)发射的地头激光束,所述感光元件(16)与运动控制器(1)电连接。10.根据权利要求3或4所述的适用于大棚农机的智能运动控制系统,其特征是:所述激光束接收感应体包括感应幕布(17)、采集感应幕布(17)图像信息的ccd图像传感器(19)以及用于连接感应幕布(17)与ccd图像传感器(19)的感应暗室(18),ccd图像传感器(19)与运动控制器(1)电连接;通过感应幕布(17)接收通道激光发射器(21)发射的通道激光束或地头激光发射器(11)发射的地头激光束,ccd图像传感器(19)采集感应幕布(17)的图像信息,并将所采集感应幕布(17)的图像信息传输至运动控制器(1)内。
技术总结
本实用新型涉及一种适用于大棚农机的智能运动控制系统。其包括横向偏移测量机构、电控转向装置以及运动控制器,横向偏移测量机构、电控转向装置与运动控制器电连接;横向偏移测量机构包括设置于大棚每个地头的地头激光发射机构以及与地头激光发射机构适配的激光标靶,所述激光标靶设置于大棚农机上,激光标靶同时接收两个地头激光发射机构所发射的地头激光束,运动控制器根据激光标靶所接收的地头激光束确定大棚农机运动作业时的横向偏移量。本实用新型能有效实现对大棚农机运动的控制,提高大棚农机运动的智能化程度,安全可靠。靠。靠。
技术研发人员:张青苗 何峥晖
受保护的技术使用者:江苏悟空风行科技有限公司
技术研发日:2021.11.26
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。