:
1.本实用新型涉及热敏打印头制造技术领域,具体的说是一种能够保证陶瓷基板传送稳定性和准确性的热敏打印头用陶瓷基板传送纠偏装置。
背景技术:
2.众所周知,陶瓷基板是热敏打印头的关键部件,在打印头产品生产制造过程中,需要在陶瓷基板表面形成电路,印刷电路后需要进行烧结操作,基板在烧结炉出口经过一段空辊道后通过自动收料回传设备回收到料箱。由于烧结炉内的气流和温度影响,基板在烧结完成后于烧结炉出口辊道上会有不同大小的位置偏移或角度偏移,虽然在收料回传设备上设置了导向挡条,但是偏移较大的基板仍然会卡在挡条上,造成后续基板的堵塞和堆积。
3.现有烧结炉出口处没有纠偏机构,需要在出口安装监控摄像头,生产管理人员发现基板偏移太大出现堵料情况后进行人工纠偏,如果发现不及时会堆料严重,甚至影响产品品质。
技术实现要素:
4.本实用新型针对现有技术中存在的缺点和不足,提出了一种能够保证烧结处理后陶瓷基板传送稳定性和准确性,避免因传送偏转导致堆叠、磕碰的热敏打印头用陶瓷基板传送纠偏装置。
5.本实用新型通过以下措施达到:
6.一种热敏打印头用陶瓷基板传送纠偏装置,其特征在于,设有基板托举机构和夹爪纠偏机构,所述基板托举机构位于传送中基板的下方,并包括固定板、升降气缸以及托举板,所述升降气缸为直线气缸,升降气缸底部与固定板固定连接,升降气缸上端与托举板相连接;所述夹爪纠偏机构位于传送中基板的上方,并包括固定在固定板上的薄型气爪以及对称固定在薄型气爪上的左夹爪和右夹爪,左夹爪/右夹爪包括支架、定位压轮,支架的前端设有用于与传送中基板相抵的定位压轮,定位压轮经轮轴固定在支架前端下侧。
7.本实用新型所述左夹爪/右夹爪中的支架为t型支架,支架前端下侧对称设置两个定位压轮,以提高夹取陶瓷基板时的稳定性。
8.本实用新型所述基板托举机构中每个气缸上还设有2个磁性开关传感器,用于检测气缸的动作位置,在气缸升起/降下/夹紧/松开等动作到位时输出开关量信号,用于指示气缸当前状态,并参与逻辑控制,相关控制电路为现有技术,此不赘述。
9.本实用新型还包括反射型光纤传感器,光纤传感器经固定架固定在夹爪纠偏机构上方,用于检测是否有基板通过纠偏装置,作为纠偏逻辑动作流程的使能和报警判断的逻辑依据,相关控制电路为现有技术,此不赘述。
10.本实用新型还设有支撑框架,支撑框架包括矩形框式主体以及可调式支撑脚,支撑框架主体上并排设有两组以上基板托举机构,并设置与每组基板托举机构一一对应的两组以上的夹爪纠偏机构。
11.本实用新型所述支撑框架上的可调式支撑脚经连接板与支撑框架主体相连,连接板上设有具有内螺纹的螺栓孔或螺纹套筒,支撑脚主体包括螺栓以及底脚,螺栓下端与底脚相连,螺栓与螺栓孔或螺纹套筒相连。
12.本实用新型在使用时,通过支撑框架将装置设置在基板传送机构上,使基板托举机构位于传送中基板的下方、夹爪纠偏机构设置在传送中基板的上方,当反射型光纤传感器感知到基板后,通过驱动基板托举机构中升降气缸驱动托举板抬升,托起感知到的陶瓷基板,此时被托起的陶瓷基板位于夹爪纠偏机构中左夹爪和右夹爪中间,驱动薄型气爪,使左夹爪与右夹爪同时靠近待纠偏的陶瓷基板,利用左夹爪和右夹爪上的定位压轮,使该陶瓷基板位置摆正,此后左夹爪与右夹爪松开,基板托举机构中的升降气缸拉动托举板下移,纠偏后陶瓷基板重新回到传送机构,继续送出。
13.本实用新型与现有技术相比,能够自动对连续传送的多轨道多个陶瓷基板逐个准确纠偏,具有结构合理、传送稳定等显著的优点。
附图说明:
14.附图1是本实用新型中基板托举机构以及夹爪纠偏机构的结构示意主视图。
15.附图2是本实用新型中夹爪纠偏机构的结构示意后视图。
16.附图3是本实用新型中支撑框架的一种结构示意图。
17.附图4是本实用新型的一种整体结构示意图。
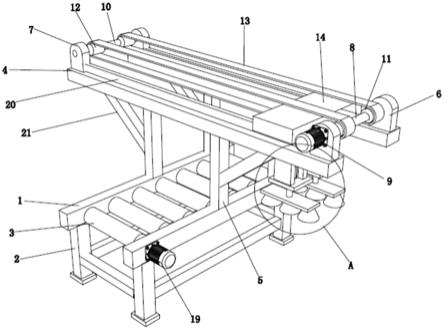
18.附图5是本实用新型的一种实施方式侧视图。
19.附图6是本实用新型的一种实施方式主视图。
20.附图标记:反射型光纤传感器(1)、夹爪定位板(2)、固定架(3)、薄型气爪(4)、支架(5)、定位压轮(6)、调速阀(7)、固定板(8)、磁性开关传感器(9)、升降气缸(10)、托举板(11)。
具体实施方式:
21.下面结合附图和实施例,对本实用新型做进一步的说明。
22.如附图所示,本实用新型提出了一种热敏打印头用陶瓷基板传送纠偏装置,设有基板托举机构和夹爪纠偏机构,所述基板托举机构位于传送中基板的下方,并包括固定板(8)、升降气缸(10)以及托举板(11),所述升降气缸(10)为直线气缸,升降气缸(10)底部与固定板(8)固定连接,升降气缸(10)上端与托举板(11)相连接;所述夹爪纠偏机构位于传送中基板的上方,并包括夹爪定位板(2)、固定在定位板上的薄型气爪(4)以及对称固定在薄型气爪上的左夹爪和右夹爪,左夹爪/右夹爪包括支架(5)、定位压轮(6),其中支架(5)的后端与薄型气爪(4)相连,前端设有用于与传送中基板相抵的定位压轮(6),定位压轮(6)经轮轴固定在支架(5)前端下侧。
23.本实用新型所述左夹爪/右夹爪中的支架(5)为t型支架,支架(5)前端下侧对称设置两个定位压轮(6),以提高夹取陶瓷基板时的稳定性。
24.本实用新型所述基板托举机构中升降气缸(10)和薄型气爪(4)上还设有磁性开关传感器(9),用于检测各个气缸的动作状态,还设有调速阀(7),用于调整各个气缸的动作速度。
25.本实用新型还包括反射型光纤传感器(1),光纤传感器(1)经固定架(3)固定在夹爪纠偏机构上方型材框架上,用于检测是否有基板通过纠偏设备。
26.本实用新型还设有支撑型材框架,支撑框架包括矩形框式主体以及可调式支撑脚,支撑框架主体上并排设有两组以上基板托举机构,并设置与每组基板托举机构一一对应的两组以上的夹爪纠偏机构。
27.本实用新型所述支撑框架上的可调式支撑脚经连接板与支撑框架主体相连,连接板上设有具有内螺纹的螺栓孔或螺纹套筒,支撑脚主体包括螺栓以及底脚,螺栓下端与底脚相连,螺栓与螺栓孔或螺纹套筒相连。
28.实施例1:
29.如附图5所示,本例提供了一种热敏打印头用陶瓷基板传送纠偏装置,其中支撑框架上并排设置两个以上的基板托举机构,并在基板托举机构侧面经夹爪定位板(2)对应设置夹爪纠偏机构,其中所述基板托举机构位于传送中基板的下方,并包括固定板(8)、升降气缸(10)以及托举板(11),所述升降气缸(10)为直线气缸,升降气缸(10)底部与固定板(8)固定连接,升降气缸(10)上端与托举板(11)相连接;所述夹爪纠偏机构位于传送中基板的上方,并包括夹爪定位板(2)、薄型气爪(4)以及对称固定在薄型气爪上的左夹爪和右夹爪,左夹爪/右夹爪包括支架(5)、定位压轮(6),其中支架(5)的后端与薄型气爪(4)相连,前端设有用于与传送中基板相抵的定位压轮(6),定位压轮(6)经轮轴固定在支架(5)前端下侧;所述左夹爪/右夹爪中的支架(5)为t型支架,支架(5)前端下侧对称设置两个定位压轮(6),以提高夹取陶瓷基板时的稳定性;
30.本例在使用时,通过支撑框架将装置设置在基板传送机构上,使基板托举机构位于传送中基板的下方、夹爪纠偏机构设置在传送中基板的上方,当反射型光纤传感器感知到基板后,通过驱动基板托举机构中升降气缸驱动托举板抬升,托起感知到的陶瓷基板,此时被托起的陶瓷基板位于夹爪纠偏机构中左夹爪和右夹爪中间,驱动薄型气爪,使左夹爪与右夹爪同时靠近待纠偏的陶瓷基板,利用左夹爪和右夹爪上的定位压轮,使该陶瓷基板位置摆正,此后左夹爪与右夹爪松开,基板托举机构中的升降气缸拉动托举板下移,纠偏后陶瓷基板重新回到传送机构,继续送出。
31.本实用新型与现有技术相比,能够自动对连续传送的多个陶瓷基板逐个准确纠偏,具有结构合理、传送稳定等显著的优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。