1.本实用新型涉及协作机器人技术领域,具体为一种可以及时检测碰撞情况的七轴协作机器人。
背景技术:
2.随着社会经济的发展,科学技术的进步,机器人作为一种代替或配合人类实现各类繁重劳动的重要工具,越来越受到整个社会的重视。但是传统机器人无法完成对手臂灵敏度,安全性,协作性的需求,因此社会需要一种高度灵活,高安全性,具有协作能力的机器人,用以协助人类实现某些繁重的工作。在传统的工业机器人逐渐取代单调、重复性高、危险性强的工作之时,协作机器人也将会慢慢渗入各个工业领域,与人共同工作。
3.现有的可以及时检测碰撞情况的七轴协作机器人还存着缺陷,关节处在工作过程中经常需要转动变化角度,长时间使用后,旋转处容易出现磨损,降低机器人的灵活性,无法实现精确的操作,缺乏对关节处及时润滑的结构,智能性较差,不符合实际的需要,降低了机器人的工作能力,具有极大的改进空间。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种可以及时检测碰撞情况的七轴协作机器人,解决了关节处在工作过程中经常需要转动变化角度,长时间使用后,旋转处容易出现磨损,降低机器人的灵活性,缺乏对关节处及时润滑的结构,智能性较差的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:一种可以及时检测碰撞情况的七轴协作机器人,包括基座,所述基座的左侧固定连接有第一关节,所述第一关节的顶部固定连接有第一连接柱,所述第一连接柱的顶部固定连接有第二关节,所述第二关节的右端固定连接有第三关节,所述第三关节的顶部固定连接有第二连接柱,所述第二连接柱的顶部固定连接有第四关节,所述第四关节的左端固定连接有第五关节,所述第五关节的顶部固定连接有第三连接柱,所述第三连接柱的顶部固定连接有第六关节,所述第六关节的右端固定连接有第七关节,所述第二关节包括关节轴,所述关节轴的中间固定设置有衔接柱,所述关节轴左右两侧的外表面均匀转动连接有若干滚珠,所述衔接柱的底部固定设置有顶块,所述关节轴的外部套设有关节套筒,所述关节套筒的上部开设有存放腔,所述存放腔的底部固定设置有橡胶厚膜,所述关节套筒的下部开设有放置腔,所述放置腔的内部填充有吸油棉。
6.优选的,所述橡胶厚膜的底部固定连接有触碰块。
7.优选的,所述存放腔的底部左右两侧均开设有出油孔,两个所述出油孔分别位于对应一侧滚珠的上方。
8.优选的,所述存放腔的内部填充有润滑油,所述放置腔的顶部左右两侧均开设有进油孔。
9.优选的,所述放置腔的左侧设置有密封塞,所述顶块与触碰块相对应。
10.优选的,所述第一关节、第二关节、第三关节、第四关节、第五关节以及第六关节的结构相同。
11.有益效果
12.本实用新型提供了一种可以及时检测碰撞情况的七轴协作机器人。与现有技术相比具备以下有益效果:
13.(1)、该可以及时检测碰撞情况的七轴协作机器人,通过在第五关节的顶部固定连接有第三连接柱,第三连接柱的顶部固定连接有第六关节,第六关节的右端固定连接有第七关节,第二关节包括关节轴,关节轴的中间固定设置有衔接柱,关节轴左右两侧的外表面均匀转动连接有若干滚珠,衔接柱的底部固定设置有顶块,关节轴的外部套设有关节套筒,关节套筒的上部开设有存放腔,存放腔的底部固定设置有橡胶厚膜,关节套筒的下部开设有放置腔,放置腔的内部填充有吸油棉,通过顶块、橡胶厚膜、触碰块以及出油孔之间的相互配合,当关节轴带动衔接柱转动的过程中,会使顶块向上挤压触碰块,从而使橡胶厚膜挤压存放腔内部的润滑油,在压力的作用下润滑油通过出油孔被挤出一定的量,及时对滚珠进行润滑,避免旋转处磨损,保证机器人的灵活性。
14.(2)、该可以及时检测碰撞情况的七轴协作机器人,通过在橡胶厚膜的底部固定连接有触碰块,存放腔的底部左右两侧均开设有出油孔,两个出油孔分别位于对应一侧滚珠的上方,存放腔的内部填充有润滑油,放置腔的顶部左右两侧均开设有进油孔,放置腔的左侧设置有密封塞,顶块与触碰块相对应,第一关节、第二关节、第三关节、第四关节、第五关节以及第六关节的结构相同,通过放置腔、吸油棉以及进油孔之间的相互配合,便于对多余的润滑油进行收集,避免润滑油的浪费,将其及时吸附在吸油棉的内部,可定期将其抽拉出来,挤压出润滑油循环利用,保证关节处的洁净。
附图说明
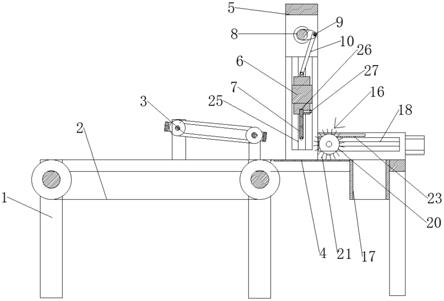
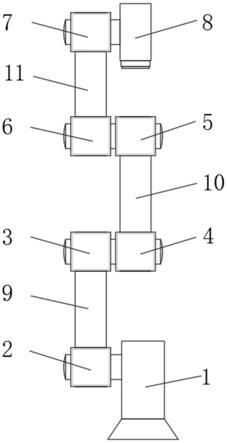
15.图1为本实用新型的结构主视图;
16.图2为本实用新型第二关节的剖视图;
17.图3为本实用新型第二关节的左视剖面图。
18.图中:1、基座;2、第一关节;3、第二关节;31、关节轴;32、衔接柱;33、滚珠;34、顶块;35、关节套筒;36、存放腔;37、橡胶厚膜;38、触碰块;39、出油孔;310、放置腔;311、吸油棉;312、进油孔;313、密封塞;4、第三关节;5、第四关节;6、第五关节;7、第六关节;8、第七关节;9、第一连接柱;10、第二连接柱;11、第三连接柱。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-3,本实用新型提供一种技术方案:一种可以及时检测碰撞情况的七轴协作机器人,包括基座1,基座1的左侧固定连接有第一关节2,第一关节2的顶部固定连接有第一连接柱9,第一连接柱9的顶部固定连接有第二关节3,第二关节3的右端固定连接有第
三关节4,第三关节4的顶部固定连接有第二连接柱10,第二连接柱10的顶部固定连接有第四关节5,第四关节5的左端固定连接有第五关节6,第五关节6的顶部固定连接有第三连接柱11,第三连接柱11的顶部固定连接有第六关节7,第六关节7的右端固定连接有第七关节8,第二关节3包括关节轴31,关节轴31的中间固定设置有衔接柱32,关节轴31左右两侧的外表面均匀转动连接有若干滚珠33,衔接柱32的底部固定设置有顶块34,关节轴31的外部套设有关节套筒35,关节套筒35的上部开设有存放腔36,存放腔36的底部固定设置有橡胶厚膜37,关节套筒35的下部开设有放置腔310,放置腔310的内部填充有吸油棉311,通过顶块34、橡胶厚膜37、触碰块38以及出油孔39之间的相互配合,当关节轴31带动衔接柱32转动的过程中,会使顶块34向上挤压触碰块38,从而使橡胶厚膜37挤压存放腔36内部的润滑油,在压力的作用下润滑油通过出油孔39被挤出一定的量,及时对滚珠33进行润滑,避免旋转处磨损,保证机器人的灵活性,橡胶厚膜37的底部固定连接有触碰块38,存放腔36的底部左右两侧均开设有出油孔39,两个出油孔39分别位于对应一侧滚珠33的上方,存放腔36的内部填充有润滑油,放置腔310的顶部左右两侧均开设有进油孔312,放置腔310的左侧设置有密封塞313,顶块34与触碰块38相对应,第一关节2、第二关节3、第三关节4、第四关节5、第五关节6以及第六关节7的结构相同,通过放置腔310、吸油棉311以及进油孔312之间的相互配合,便于对多余的润滑油进行收集,避免润滑油的浪费,将其及时吸附在吸油棉311的内部,可定期将其抽拉出来,挤压出润滑油循环利用,保证关节处的洁净。
21.同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
22.使用时,第一关节2、第二关节3、第三关节4、第四关节5、第五关节6、第六关节7以及第七关节8的内部均设置有角度控制结构,该角度控制结构能够控制这个节点任意旋转至某个角度,在旋转的过程中,关节轴31带动衔接柱32旋转,顶块34随之旋转,顶块34在旋转的过程中会间歇的碰到触碰块38,将其向存放腔36的内部顶去,橡胶厚膜37受到挤压力进而挤压存放腔36内部的润滑油,润滑油从出油孔39中被压出一定的量,滴向滚珠33的表面,减小旋转处的摩擦,当滚珠33表面有多余的润滑油时,其会沿着关节轴31向进油孔312处滑落,进入放置腔310内部,被吸油棉311所吸收,当吸油棉311内部吸收较多润滑油时,打开密封塞313将吸油棉311拉出,将内部的润滑油挤压出来,以便循环使用。
23.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。