1.本实用新型涉及机械结构技术领域,特别是涉及一种楼梯爬升装置。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
3.扫地机器人的机身为无线机器,以圆盘型为主。使用充电电池运作,操作方式以遥控器、或是机器上的操作面板。一般能设定时间预约打扫,自行充电。前方有设置感应器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,并依每间不同厂商设定,而走不同的路线,有规划清扫地区,此外,扫地机器人还具有防跌落功能。(部分较早期机型可能缺少部分功能),因为其简单操作的功能及便利性,现今已慢慢普及,成为上班族或是现代家庭的常用家电用品。
4.在现有的扫地机器人,一般是只能在一个凭平整的地面上工作,然而针对一些跃层、别墅等构造的房屋,扫地机器人无法对楼梯进行作业,只能通过人工作业。
5.因此,亟需设计一种楼梯爬升装置来克服现有技术的不足。
技术实现要素:
6.本实用新型为达到上述技术目的所采用的技术方案是:一种楼梯爬升装置,其特征在于,包括:外壳,所述外壳的底部设有型腔,所述外壳的中部内固定连接有升降机构,所述升降机构的底端穿出所述外壳的底部位于所述型腔内,所述升降机构穿出所述外壳的一端转动连接有万向驱动装置,所述万向驱动机构包括:履带支架、履带轮、驱动电机;所述履带轮分别设置于所述履带支架的两侧,所述驱动电机固定设于所述履带支架的一端并与所述履带轮传动连接,所述履带支架的两侧之间滑动连接有平移板,所述平移板的中部与所述升降机构的底端转动连接,所述履带支架的一侧内设有齿条,所述平移板与所述齿条相邻的一端上固定连接有平移电机,所述平移电机的输出端与所述齿条传动连接。
7.在一个优选的实施例中,所述升降机构包括:升降电机、螺杆、螺套;所述升降电机与所述外壳的顶壁固定连接,所述螺杆与所述升降电机的输出端固定连接,所述螺杆的侧壁上设有外螺纹,所述螺套的内壁上设有与所述外螺纹相配合的内螺纹,所述螺套与所述螺杆螺纹连接,所述螺套的底端穿出所述外壳的底部,并与所述外壳的底部滑动连接。
8.在一个优选的实施例中,所述螺套的外壁呈正多边形状。
9.在一个优选的实施例中,所述外壳的底部内设有竖直的滑套,所述滑套与所述升降机构对应,所述滑套套设于所述螺套的外壁上。
10.在一个优选的实施例中,所述外壳与所述万向驱动装置前进方向相对应的一面及所述外壳的底面上分别设有清洁片。
11.在一个优选的实施例中,所述履带支架包括:两个间隔设置的拖带支架,所述履带轮设置于所述拖带支架上,两个所述拖带支架的一端通过连接板固定连接,所述驱动电机设置于所述连接板上,所述齿条设于两个所述拖带支架的其中一个上,两个所述拖带支架相对的一面上分别设有“t”形凹槽,所述平移板的两端分别设有与所述凹槽适配的“t”形滑块,所述平移板位于两个所述拖带支架之间。
12.本实用新型的有益效果是:本实用新型通过设置升降装置实现外壳和万向驱动机构的上升,通过在外壳内设置万向驱动机构实现外壳的移动,通过平移电机和齿条的配合,实现外壳相对履带支架移动,实现台阶的爬升。采用上述设计,结构简单,设计合理,能够多向移动,具有较大的市场应用价值。
附图说明
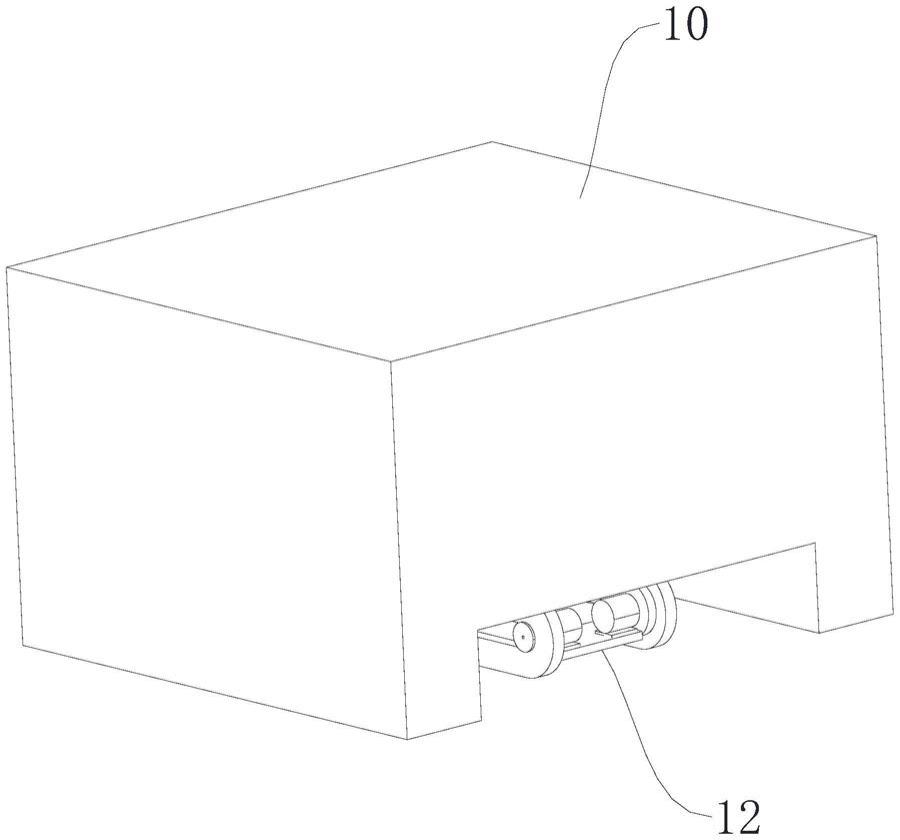
13.图1为本实用新型的结构示意图;
14.图2为本实用新型的爆炸图;
15.图3为本实用新型履带支架的结构示意图;
16.图4为本实用新型平移件的结构示意图;
17.图5为本实用新型升降机构与万向驱动机构的配合示意图;
18.图6为本实用新型的截面示意图;
19.图7为本实用新型的使用状态图i;
20.图8为本实用新型的使用状态图ii;
21.图9为本实用新型的使用状态图iii;
22.图10为本实用新型的使用状态图iv;
23.图11为本实用新型的使用状态图v。
24.图中:
25.10、外壳;101、型腔;102、滑套;11、升降机构;111、升降电机; 112、螺杆;113、螺套;12、万向驱动机构;121、履带支架;1211、拖带支架;1212、连接板;1213、凹槽;122、履带轮;123、驱动电机;124、平移板;1241、滑块;125、平移电机;126、齿条。
具体实施方式
26.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
27.如图1-图6所示,本实用新型提供一种楼梯爬升装置,其特征在于,包括:外壳10,所述外壳10的底部设有型腔101,该型腔101呈向外壳10内部凹陷且一面开口状,所述外壳10的中部内固定连接有升降机构11,所述升降机构11 的底端穿出所述外壳10的底部位于所述型腔101内,该升降机构11的底端与外壳10的底部为滑动配合,当升降机构11运行时带动外壳10升降,所述升降机构11穿出所述外壳10的一端转动连接有万向驱动机构12,用于带动外壳 10前进或后退或转弯,所述万向驱动机构12包括:履带支架121、履带轮 122、驱
动电机123;所述履带轮122分别设置于所述履带支架121的两侧,所述驱动电机123固定设于所述履带支架121的一端并与所述履带轮122传动连接,其中,驱动电机123设有两个,分别与对应的履带轮122传动连接,所述履带支架121的两侧之间滑动连接有平移板124,所述平移板124的中部与所述升降机构11的底端转动连接,所述履带支架121的一侧内设有齿条126,所述平移板124与所述齿条126相邻的一端上固定连接有平移电机125,所述平移电机125的输出端与所述齿条126传动连接,当升降机构11运行时能带动外壳10上升或下降,可以理解的,当外壳10受到外界的限制而无法下降时,升降机构11运行时能够带动与之连接万向驱动机构12上升或下降,万向驱动机构12运行时能够带动外壳10前进或后退或转弯,当需要前进或后退时,可通过控制两个驱动电机123同步正转或反转,从而带动履带轮122正转或反转,当需要转弯时,因平移板124与升降机构11的底端为转动连接,可通过控制其中一个电机的运行或控制两个电机相互反向运行,即可带动履带支架121转动,进而实现转弯,平移电机125用于控制外壳10相对万向驱动机构12移动,即平移电机125运行时,因履带支架121上的齿条126与平移电机125为传动连接,故平移电机125会带动外壳10移动而履带支架121不动或平移电机125 带动履带支架121移动而外壳10不动。
28.进一步的,在本实施例中,所述升降机构11包括:升降电机111、螺杆 112、螺套113;所述升降电机111与所述外壳10的顶壁固定连接,所述螺杆112 与所述升降电机111的输出端固定连接,所述螺杆112的侧壁上设有外螺纹,所述螺套113的内壁上设有与所述外螺纹相配合的内螺纹,所述螺套113与所述螺杆112螺纹连接,所述螺套113的底端穿出所述外壳10的底部,并与所述外壳10的底部滑动连接;具体的,当升降电机111运行时,螺杆112在升降电机111的带动下于螺套113内旋转,同时螺套113与外壳10的底部为滑动连接,因此螺杆112在螺套113内上下运动时,会带动外壳10相对螺套113 上下滑动,进而实现外壳10的上升或下降。
29.进一步的,在本实施例中,所述螺套113的外壁呈正多边形状;具体的,为防止螺杆112在螺套113内旋转时,螺套113随螺杆112旋转,而导致螺杆 112无法带动外壳10上升或下降的问题,故将螺套113设置成正多边形状,同时外壳10的底部与螺套113相接触的地方亦为相同正多边形状,进而限制螺套113随螺杆112旋转,其中正多边形状可以是正三角形或正方向形或正五边形或正六变形或是其他具有菱角能够限制螺套113旋转的形状等。
30.进一步的,在本实施例中,外壳10的底部内固定设有竖直的滑套102,所述滑套102与所述升降机构11对应,所述滑套102套设于所述螺套113的外壁上,使滑套102能够在螺套113上上下滑动,该滑套102的中部内设有与螺套113形状适配的通孔,螺套113的底端穿过该通孔位于型腔101内,从而使螺杆112旋转时螺套113在滑套102的限制下无法随之旋转,从而实现外壳10 的上升或下降,同时滑套102的设置还能够防止外壳10倾斜。
31.进一步的,在本实施例中,所述外壳10与所述万向驱动机构12前进方向相对应的一面及所述外壳10的底面上分别设有清洁片(图中未示出),具体的,通过清洁片的设置,使外壳10在移动时还能对处于外壳10前进方向上的墙面和外壳10底部的地面进行清洁。
32.进一步的,在本实施例中,所述履带支架121包括:两个间隔设置的拖带支架1211,所述履带轮122设置于所述拖带支架1211上,两个所述拖带支架 1211的一端通过连接板1212固定连接,所述驱动电机123设置于所述连接板 1212上,所述齿条126设于两个所述拖带支架1211的其中一个上,两个所述拖带支架1211相对的一面上分别设有“t”形凹槽1213,
所述平移板124的两端分别设有与所述凹槽1213适配的“t”形滑块1241,所述平移板124位于两个所述拖带支架1211之间;具体的,因平移板124与螺套113的底部为转动连接,平移板124无法相对螺套113上下左右前后移动,只能相对螺套113旋转,因此在平移电机125运行时,通过平移电机125与齿条126的配合,使平移电机125促使履带支架121相对外壳10移动或是促使外壳10相对履带支架 121移动,进而使本实用新型能够在具有台阶的地面上进行爬升。
33.工作原理,如图7-图8所示,万向驱动机构12带动外壳10来到第一台阶处,升降机构11运行,顶升外壳10,使外壳10的底部与第一台阶的台面平齐,随后如图9所示,平移电机125运行,此时因履带轮122与地面为接触状态,摩擦力较大,而外壳10处于悬空的状态,因此在此状态下平移电机125运行时平移电机125带动平移板124在履带支架121上滑动,平移板124带动升降机构11移动,升降机构11带动外壳10移动,使外壳10的前端搭在第一台阶的台面上,完成外壳10的上升,随后如图10所示,升降电机111在反向运行,此时因外壳10受到第一台阶的台面限制而无法下降,因此升降电机111在该状态下反向运行时,螺杆112带动螺套113上升,螺套113带动与之连接的平移板124上升,平移板124带动履带支架121上升,因型腔101为一面开口状,因此履带支架121能够部分能够进入型腔101内,部分位于型腔101外,而不受外壳10的阻挡,随后如图11所示,平移电机125再次运行,此时因外壳10 与台面为接触状态,摩擦力较大,而履带支架121为悬空状态,因此平移电机 125在该状态下运行时,外壳10为不动的,平移电机125运行时带动履带支架 121相对外壳10滑动,使履带支架121完全进入型腔101内,随后驱动电机123 运行,使外壳10的前端与后续台阶的墙面接触,至此完成台阶的爬升,后续台阶重复上述步骤即可。
34.需要说明的是,在本实施例中,履带轮122的长度应大于外壳10总长度的一半,使履带轮122具有更大的面积与地面接触,而提升履带轮122的支撑力,避免因外壳10上升后需向前移动时,因重心偏移,而履带轮122的支撑力不够导致倾斜倒塌的情况出现。
35.综上所述,本实用新型通过设置升降装置实现外壳和万向驱动机构的上升,通过在外壳内设置万向驱动机构实现外壳的移动,通过平移电机和齿条的配合,实现外壳相对履带支架移动,实现台阶的爬升。采用上述设计,结构简单,设计合理,能够多向移动,具有较大的市场应用价值。
36.本实用新型并不仅仅限于说明书和实施方式中所描述,因此对于熟悉领域的人员而言可容易地实现另外的优点和修改,故在不背离权利要求及等同范围所限定的一般概念的精神和范围的情况下,本实用新型并不限于特定的细节、代表性的设备和这里示出与描述的图示示例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。