343.)等。现有的焊接堵管方法多处于探索也研究阶段,极少有针对高温气冷堆蒸汽发生器或其它类型蒸汽发生器工作现场的自动化焊接堵管的案例报道。
4.激光焊接(laser welding)利用激光束作为热源,能量密度高、激光光斑直径小、热量可精确控制、焊接热影响区小、接头质量高、光束可达性好,适用于精密加工,可有效减少焊接变形,广泛应用于汽车、船舶、航空航天等装备制造业领域中。相比于氩弧焊等焊接工艺,激光焊接有望进一步提高堵管的可靠性和密封性,进一步提高堵头焊接质量和焊接精度,这一特质对进一步提升核电系统的运行安全具有重要意义。针对高温气冷堆蒸汽发生器给水端的激光焊接堵管技术,主要存在的问题是:(1)如何根据给水端的特殊结构,实现激光焊接堵管工艺?(2)如何提高堆蒸汽发生器给水端激光焊接堵管作业的自动化程度,降低作业人员在辐射环境下的近程操作时间?(3)如何解决设备通过性问题,可使整套设备顺利通过狭小的输运空间?上述问题是制约激光焊接技术用于高温气冷堆核电站蒸汽发生器给水端堵管作业的关键所在。
技术实现要素:
5.针对现有技术的不足,本实用新型的目的在于提供一种用于高温气冷堆核电站蒸汽发生器给水端激光焊接堵管装置。
6.本实用新型解决技术问题所采取的技术方案如下:
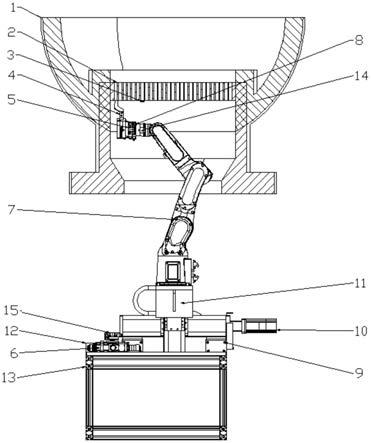
7.高温气冷堆蒸汽发生器给水端激光焊接堵管装置,包括焊接堵头3、多轴机器人7、气动卡爪4、卡爪快换接头5、激光头6、机器人快换接头8、x轴运动机构9、y轴运动机构10、z轴运动机构11、堵头容器盒12、支撑架13、摄像头14和激光头快换接头15;
8.所述的x轴运动机构9、y轴运动机构10和z轴运动机构11组成三轴运动平台,并通过x轴运动机构9固定于支撑架13上;多轴机器人7的底盘固定在z轴运动机构11上并可在三轴运动平台的带动下实现x/y/z方向的直线运动;
9.所述的机器人快换接头8固定安装于多轴机器人7的前端,气动卡爪4和卡爪快换接头5固定安装,激光头快换接头15和激光头6固定安装;机器人快换接头8可分别与卡爪快换接头5或激光头快换接头15相互配套连接和分离,即,机器人快换接头8松开卡爪快换接头5后可连接放置于支撑架13上的激光头快换接头15,松开激光头快换接头15后可连接放置于支撑架13上的卡爪快换接头5;
10.所述的焊接堵头3放置于堵头容器盒12中,堵头容器盒12安装于支撑架 13上;焊接堵头3可由气动卡爪4抓取并在多轴机器人7的带动下运送并插入给水端管板2上待封堵的传热管中,实现焊接堵头3的上料;
11.所述的激光头6可在多轴机器人7的带动下移动至安装在给水端管板2上的焊接堵头3处,并跟随多轴机器人7的运动轨迹实现焊接作业;
12.所述的摄像头14安装于多轴机器人7的前端不受气动卡爪4或激光头6影响的位置,所获取的图像用于判断给水端管板2上的故障传热管位置、多轴机器人7的空间位置及焊接作业的质量。
13.进一步地,所述的多轴机器人7为六轴机器人,能通过轨迹规划避免与蒸汽发生器容器1和给水端管板2干涉。
14.进一步地,所述的激光头6可通过光纤接受外部激光源,并可通过连接外部冷却介
质或保护气体实现降温冷却或焊接保护。
15.进一步地,所述的气动卡爪4、卡爪快换接头5、激光头快换接头15和机器人快换接头8可通过气管连接压力气源实现所需动作。
16.进一步地,所述的多轴机器人7、激光头6及其它配套装置可承受一定程度的核电辐射,耐辐照能力不低于10gy/h。
17.与现有技术相比,本实用新型的有益效果在于:将激光焊接工艺应用于高温气冷堆核电站蒸汽发生器给水端的焊接堵管作业中,给出了实现激光焊接堵管作业的执行机构。通过多轴运动机构配备图像采集,提高激光焊接堵管作业的自动化程度,降低作业人员在辐射环境下的近程操作时间,提高了激光焊接堵管的定位精度和焊接作业精度;通过三轴运动平台和多轴机器人组合实现装置小型化,便于在有限空间运输与安装。本实用新型为核电站蒸汽发生器给水端的焊接堵管提供创新性解决方案。
附图说明
18.实用新型
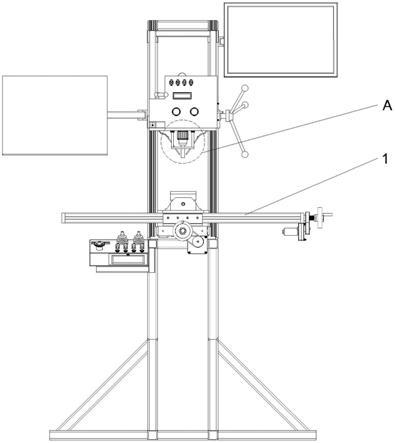
19.图1为本实用新型装置立体图。
20.图2为本实用新型装置主视图。
21.图3为本实用新型装置去掉蒸汽发生器容器的示意图。
22.图4为本实用新型装置中多轴机器人抓取气动卡爪示意图。
23.图中:1蒸汽发生器容器,2给水端管板,3焊接堵头,4气动卡爪,5卡爪快换接头,6激光头,7多轴机器人,8机器人快换接头,9x轴运动机构,10 y轴运动机构,11z轴运动机构,12堵头容器盒,13支撑架,14摄像头,15 激光头快换接头。
具体实施方式
24.以下结合附图对本实用新型进一步说明。
25.如图1、图2、图3和图4所示,高温气冷堆蒸汽发生器给水端激光焊接堵管装置,包括焊接堵头3,多轴机器人7,气动卡爪4,卡爪快换接头5,激光头6,机器人快换接头8,x轴运动机构9,y轴运动机构10,z轴运动机构 11,堵头容器盒12,支撑架13,摄像头14,激光头快换接头15;
26.所述的x轴运动机构9、y轴运动机构10和z轴运动机构11组成三轴运动平台,并通过x轴运动机构9固定于支撑架13上;多轴机器人7的底盘固定在z轴运动机构11上并可在三轴运动平台的带动下实现x/y/z方向的直线运动;
27.所述的机器人快换接头8固定安装于多轴机器人7的前端,气动卡爪4和卡爪快换接头5固定安装,激光头快换接头15和激光头6固定安装;机器人快换接头8可分别与卡爪快换接头5或激光头快换接头15相互配套连接和分离,即,机器人快换接头8松开卡爪快换接头5后可连接放置于支撑架13上的激光头快换接头15,松开激光头快换接头15后可连接放置于支撑架13上的卡爪快换接头5;
28.所述的焊接堵头3放置于堵头容器盒12中,堵头容器盒12安装于支撑架 13上;焊接堵头3可由气动卡爪4抓取并在多轴机器人7的带动下运送并插入给水端管板2上待封堵的传热管中,实现焊接堵头3的上料;
29.所述的激光头6可在多轴机器人7的带动下移动至安装在给水端管板2上的焊接堵头3处,并跟随多轴机器人7的运动轨迹实现焊接作业;
30.所述的摄像头14安装于多轴机器人7的前端不受气动卡爪4或激光头6影响的位置,所获取的图像用于判断给水端管板2上的故障传热管位置、多轴机器人7的空间位置及焊接作业的质量。
31.所述的多轴机器人7为六轴机器人,能通过轨迹规划避免与蒸汽发生器容器1和给水端管板2干涉。
32.所述的激光头6可通过光纤接受外部激光源,并可通过连接外部冷却介质或保护气体实现降温冷却或焊接保护。
33.所述的气动卡爪4、卡爪快换接头5、激光头快换接头15和机器人快换接头8可通过气管连接压力气源实现所需动作。
34.所述的多轴机器人7、激光头6及其它配套装置可承受一定程度的核电辐射,耐辐照能力不低于10gy/h。
35.如图1至图4所示,基于机器人的高温气冷堆核电站蒸汽发生器给水端激光焊接堵管装置,其工作原理如下:
36.在多轴机器人7的执行端安装机器人快换接头8,机器人快换接头8可与激光头快换接头15或卡爪快换接头5相互配套,实现自动安装和分离更换。其原理是,采用模块化的接头,将机器人快换接头8设置为公头,将激光头快换接头15和卡爪快换接头5设置为母头,当机器人快换接头8与激光头快换接头15 或卡爪快换接头5安装或分离时,利用集成于接头上的气动执行元件实现开合动作。
37.当需要焊接堵头3上料时,多轴机器人7的执行末端运行到气动卡爪4处,并通过卡转快换接头5处连接气动卡爪4。完成气动卡爪4安装后,多轴机器人 7带动气动卡爪4抓取堵头容器盒12中的焊接堵头3,并将之输运到给水端管板2待封堵传热管处。待焊接堵头3正确插入传热管后,气动卡爪4松开焊接堵头3,运动至支撑架13附近,通过机器人快换接头8和卡爪快换接头5的配合,松开气动卡爪4,气动卡爪4和卡爪快换接头5被放置于支撑架13上。
38.完成焊接堵头3的装插上料后,多轴机器人7通过激光头快换接头15安装激光头6,并将激光头6运送到已装插于给水端管板2附近的焊接堵头3处,开展焊接作业。焊接作业根据前期编制的运动轨迹和加工参数开展。完成焊接作业后,多轴机器人7将激光头6运送到支撑架13附近后脱开连接,将激光头6 和激光头快换接头15放置于支撑架13上。
39.为顺利实现多轴机器人7对焊接堵头3的抓取、对给水端管板2故障评估、对装插焊接堵头3的定位操作、对安装和更换激光头6的操作定位、对蒸汽发生器容器1和给水端管板2的避障等,在多轴机器人7的执行末端安装摄像头14。根据摄像头14采集的图像并结合图像处理方法和机器视觉方法等,实现上述功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。