1.本实用新型涉及起重机运行技术领域,尤其是涉及一种精确度高的起重机对轨控制电路。
背景技术:
2.公知的,随着现代科技发展,对过轨起重机的对轨、过轨的生产效率要求越来越高,快速而准确的完成对轨变得尤为重要;传统有人工对轨和自动对轨两种方式,其中人工对轨是工人站在地面,手持遥控设备控制起重机运行,进而完成对轨,但是采用该方式时,由于工人需要长时间仰视观察起重机的对轨情况,从而对工人的身体负荷较大,且人眼观察还会导致对轨的精度较低;而自动对轨方案是在过轨起重机上设置定位开关,然后由plc程序根据定位开关的位置控制电机运行,但是由于定位开关的定位精度低;
3.因此,综上所述,目前市场上需要一种能够提高起重机对轨精度的控制电路。
技术实现要素:
4.为了克服背景技术中的不足,本实用新型公开了一种精确度高的起重机对轨控制电路。
5.为实现上述发明目的,本实用新型采用如下技术方案:
6.一种精确度高的起重机对轨控制电路,包含运行梁、固定梁、变频器、plc控制器、编码尺和控制手柄,所述控制手柄、plc控制器和变频器通过profinet通讯总线连接,所述编码尺的输出端与plc控制器的输入端对应连接,变频器用于控制运行梁移动;所述编码尺包含读头和标尺,其中读头安装在固定梁的端部,标尺安装在运行梁的端部,且读头能够配合读取标尺上的数值,读头的输出端与plc控制器的输入端对应连接。
7.优选的,所述变频器设有能够根据编码尺读数控制变频器运行的定位卡。
8.优选的,所述控制手柄包含按钮sb2-1、sb7-1、sb7-2、sb8-1和sb8-2,以及继电器k41、k42、k43和k44,其中按钮sb2-1与继电器k44的感应线圈对应相连,按钮sb7-1与继电器k41的感应线圈对应相连,按钮sb8-1与继电器k42的感应线圈对应相连,按钮sb7-2和按钮sb8-2均与继电器k43的感应线圈对应相连;所述继电器k41、k42和k43的常开触点分别与变频器的起重机前进端子、起重机后退端子和起重机加速端子对应连接,继电器k44的常开触点与plc控制器对应连接。
9.优选的,所述按钮sb7-1与继电器k41的感应线圈之间设有继电器k42的常闭触点,按钮sb8-1与继电器k42的感应线圈之间设有继电器k41的常闭触点。
10.优选的,所述plc控制器设有继电器k45,且继电器k45的常闭触点与操作手柄的输入端对应连接。
11.由于采用如上所述的技术方案,本实用新型具有如下有益效果:
12.本实用新型公开的一种精确度高的起重机对轨控制电路,通过编码尺的标尺和读头,能够精准得到运行梁与固定梁之间的相对位置关系,从而为plc控制器提供对轨信号,
通过plc内部程序控制变频器运行,进而实现运行梁的运行,实现运行梁与固定梁之间的精准对轨;
13.另外,本控制电路的外围线路及硬件组成简单,复杂的控制逻辑靠plc内部程序实现。
附图说明
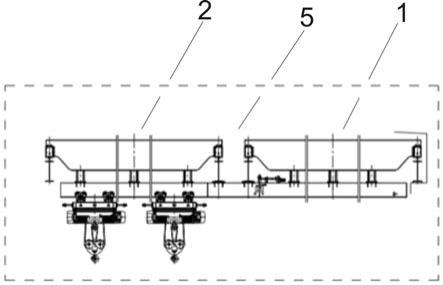
14.图1为本实用新型的一种结构示意图;
15.图2为编码尺的结构示意图;
16.图3为控制手柄的控制原理图;
17.图4为变频器的控制原理图;
18.图5为plc控制器的控制原理图。
19.图中:1、固定梁;2、运行梁;3、读头;4、标尺;5、起重机构。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型的技术方案进行说明,在描述中,需要理解的是,若有术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系,仅是与本实用新型的附图对应,为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位:
21.结合附图1-5所述的一种精确度高的起重机对轨控制电路,包含运行梁2、固定梁1、变频器、plc控制器、编码尺和控制手柄,所述控制手柄、plc控制器和变频器通过profinet通讯总线连接,能够实现三者之间的数据通讯,其中控制手柄发出的控制信号能够被变频器接收,从而控制运行梁2运动,而当运行梁2运动到编码尺读数范围内时,plc将切断控制手柄与变频器之间的控制连接,并由自身程序根据编码尺读取到的运行梁2与固定梁1之间的数据,自动向变频器发出控制信号,从而实现运行梁2的自动对轨运行,最终完成精准对轨操作,所述编码尺的输出端与plc控制器的输入端对应连接,变频器用于控制运行梁2移动,另外,变频器的输出速度为:1速时15hz,2速时50hz;此外,所述变频器设有能够根据编码尺读数控制变频器运行的定位卡,plc控制器仅接收编码尺读头3所读取到的标尺4位置数据,而通过定位卡对标尺4位置数据进行分析,确定运行梁2与固定梁1之间的相对位置,进而判断何时停止运行梁2的动作,完成对轨操作;特别的,运行梁2上安装有起重机构5,该起重机构5用于吊运物品;
22.所述编码尺包含读头3和标尺4,其中读头3安装在固定梁1的端部,标尺4安装在运行梁2的端部,且读头3能够配合读取标尺4上的数值,读头3的输出端与plc控制器的输入端对应连接,运行梁2在移动过程中,标尺4也随着运行梁2一同移动,当标尺4的一端与读头3发生了感应,此时即代表本对轨起重机进入对轨区域,plc控制器将会断开控制手柄与变频器的连接,从而进入自动控制阶段;
23.此外,所述控制手柄包含按钮sb2-1、sb7-1、sb7-2、sb8-1和sb8-2,以及继电器k41、k42、k43和k44,其中按钮sb2-1与继电器k44的感应线圈对应相连,按钮sb7-1与继电器k41的感应线圈对应相连,按钮sb8-1与继电器k42的感应线圈对应相连,按钮sb7-2和按钮sb8-2均与继电器k43的感应线圈对应相连;所述继电器k41、k42和k43的常开触点分别与变
频器的起重机前进端子、起重机后退端子和起重机加速端子对应连接,继电器k44的常开触点与plc控制器对应连接,其中按下控制手柄上的按钮sb7-1能够实现起重机的前进动作,而按下控制手柄上的按钮sb8-1则是能够实现起重机的后退动作;按下控制手柄上的按钮sb7-1时再按下按钮sb7-2,则能够实现起重机的快速运行,按钮sb8-2的使用过程与按钮sb7-2同理;而按钮sb2-1是“对轨位置标定”旋钮,在首次进行自动对轨功能之前,需要手动将运行梁2移动到对轨区域,然后按下此按钮,plc会存储此时的位置信息,为后续plc控制器的自动控制提供基准位置;
24.根据需要,所述按钮sb7-1与继电器k41的感应线圈之间设有继电器k42的常闭触点,按钮sb8-1与继电器k42的感应线圈之间设有继电器k41的常闭触点,实现运行梁2前进和后退的互锁,从而使运行梁2在前进时,若误触到按钮sb8-1,会使运行梁2立即停车,减少对运行电机的伤害;此外,所述plc控制器设有继电器k45,且继电器k45的常闭触点与操作手柄的输入端对应连接,当运行梁2移动到对轨区域时,继电器k45的感应线圈将得电导通,从而断开操作手柄的控制功能,进而使plc控制器进入自动对轨控制阶段。
25.实施本实用新型所述的一种精确度高的起重机对轨控制电路时,
26.1、观察起重机和对轨点的具体位置,然后手动操作控制手柄控制起重机大车向着对轨点方向运行;
27.2、当起重机到到对轨区域时,此时手柄控制功能将断开,plc控制器根据编码尺传输的位置信号,自动控制运行梁2继续动作;
28.4、当编码尺的读头3读取到标尺4上对应的对轨完成位置点时,运行梁2停止动作,完成运行梁2与固定梁1的对轨。
29.本实用新型未详述部分为现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。