一种单激光双psd深孔直线度检测装置及方法
技术领域
1.本发明属于深孔直线度检测技术领域,尤其涉及一种单激光双psd深孔直线度检测装置及方法。
背景技术:
2.深孔直线度的精确检测一直是深孔检测领域的难点。现有的深孔直线度检测装置大多以激光准直为原理,利用激光和位置敏感传感器(psd)等位置探测器件组成直线度测量系统。该类检测系统常以激光器外置向深孔内部发射激光,psd探头随自定心机构一起内置于深孔中,采用牵引方式或推动方式使psd探头与自定心机构一起在深孔移动,通过数据采集系统实时采集psd传感器所获得的光斑位置信息。该方法以深孔两端面的中心连线为理论轴线,将psd探头在深孔运动过程中采集的数据拟合为一条空间曲线,将此曲线作为深孔零件的实际轴线,根据理论轴线与实际轴线的误差来评定深孔直线度。
3.上述方式存在以下问题:1、psd探头随自定心机构一起在深孔中运动时,由于深孔内壁复杂摩檫力的影响,会使psd测头在孔内会发生一定角度的倾斜,侧头的倾斜会改变psd上光斑的坐标位置,从而影响了测量数据,造成深孔直线度测量的误差;2、psd探头随自定心机构一起在深孔中运动时,自定心机构会受到深孔内表面复杂的摩擦力,导致自定心机构可能会绕深孔轴线产生一定角度的旋转,同时带动psd探头发生旋转,psd探头的旋转使光斑的位置坐标改变,产生错误位置数据,从而直接影响直线度的测量精度。
技术实现要素:
4.本发明实施例的目的在于提供一种单激光双psd深孔直线度检测装置及方法,旨在解决现有装置直线度测量精度低的问题。
5.本发明是这样实现的,一种单激光双psd深孔直线度检测装置,包括深孔零件和底板,还包括:
6.光斑位置与倾角测量模块、弹性自定心机构、进给机构、升降机构和数据处理模块;
7.所述弹性自定心机构安装在底板上,所述进给机构安装在底板上,所述升降机构与底板间隔设置,所述光斑位置与倾角测量模块包括光纤激光器、正方体分光棱镜、第一二维psd、凸透镜、第二二维psd和铝合金外框架,所述铝合金外框架安装在升降机构上,所述光纤激光器安装在弹性自定心机构中,所述光纤激光器用于发射激光,所述正方体分光棱镜、第一二维psd、凸透镜和第二二维psd均固定安装在铝合金外框架内,且所述第一二维psd安装在正方体分光棱镜的正上方,所述凸透镜安装在正方体分光棱镜右端,且所述凸透镜与正方体分光棱镜之间的距离为凸透镜的一倍焦距,所述第二二维psd安装在凸透镜的右端,所述第二二维psd与凸透镜之间的距离同为凸透镜的一倍焦距,所述正方体分光棱镜的几何中心、凸透镜的光心与二维psd的原点处于同一水平直线上,所述正方体分光棱镜的几何中心与二维psd的原点处于同一竖直方向上,所述铝合金外框架靠近光纤激光器一侧
开有正方形通光孔,且所述正方形通光孔的面积大于第一二维psd和第二二维psd的感光面,所述数据处理模块分别与第一二维psd和第二二维psd连接;
8.所述弹性自定心机构用于固定光纤激光器,所述进给机构用于带动弹性自定心机构贯穿深孔零件,所述升降机构用于调节铝合金外框架的高度,所述数据处理模块用于对第一二维psd和第二二维psd的电信号进行处理。
9.进一步的技术方案,所述正方形通光孔上固定安装有高透光玻璃。
10.进一步的技术方案,所述弹性自定心机构包括定心机构外层、深沟球轴承、定心机构内层,所述定心机构外层的两端均设置有多个外凸式微力弹片,所述深沟球轴承套设在定心机构内层上,所述深沟球轴承外侧安装在定心机构外层内,所述光纤激光器安装在定心机构内层内。
11.进一步的技术方案,所述进给机构包括导轨、推杆固定座、推杆、滑块与v形块,所述推杆固定座固定安装在底板上,所述推杆固定安装在推杆固定座上,所述推杆的末端与定心机构内层固定连接,所述导轨固定安装在底板上,所述滑块滑动连接在导轨上,所述v形块固定安装在滑块上。
12.进一步的技术方案,所述滑块由伺服电机驱动。
13.进一步的技术方案,所述升降机构包括高度调节螺母、高度调节杆和磁性底座,所述高度调节杆的一端与铝合金外框架固定连接,所述高度调节杆的另一端与磁性底座固定连接。
14.进一步的技术方案,所述数据处理模块包括a/d转换卡和上位机,所述a/d转换卡分别与第一二维psd和第二二维psd连接,所述a/d转换卡用于将第一二维psd和第二二维psd转换为数字信号,所述上位机与a/d转换卡连接,所述上位机通过专用软件显示第一二维psd和第二二维psd感光面的二维位置坐标(x,y)与激光本身的倾斜角度(θ
x
,θy)。
15.进一步的技术方案,所述倾斜角度计算公式为:
[0016][0017]
所述θ
x
为光纤激光器在深孔零件中相对于初始轴线在x方向上的偏转,θy为光纤激光器在深孔零件中相对于初始轴线在y方向上的偏转,f为所选凸透镜的焦距。
[0018]
一种单激光双psd深孔直线度检测装置的检测方法,步骤如下:
[0019]
步骤一、弹性自定心机构带动光纤激光器从深孔零件左端面至右端面进行检测,然后从深孔零件右端面至左端面再一次进行检测后复位;
[0020]
步骤二、将深孔零件转动90
°
后重复步骤一;
[0021]
步骤三、再将深孔零件转动90
°
后重复步骤一;
[0022]
步骤四、再将深孔零件转动90
°
后重复步骤一;
[0023]
步骤五、最终深孔零件的直线度取四次测量的平均值。
[0024]
本发明实施例提供的一种单激光双psd深孔直线度检测装置及方法,通过在深孔零件内置光纤激光器,外置光斑位置与倾角测量模块的方法,直接测量了光纤激光器在深孔零件中的倾斜角度,克服了psd深孔测量技术中常见的因不能检测探测器倾斜角度而引起的测量误差,使测量的数据更加准确,提高了深孔直线度测量的精度,设计了一种新型的
弹性自定心机构,弹性自定心机构分为内外两层,在深孔零件中运动时外圆管依靠特殊的微弹片通过弹力实现与深孔内表面的紧密接触与自动定心,两层圆管可独立旋转,该设计减小了激光器在深孔零件中的旋转角度,使测量的数据更加精确。
附图说明
[0025]
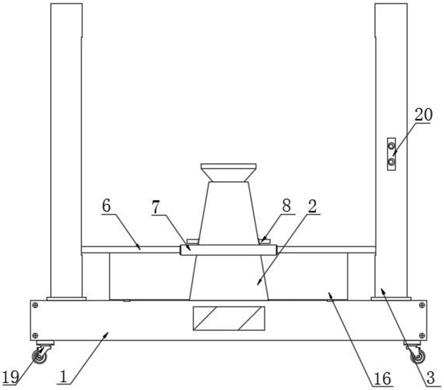
图1为本发明实施例提供的一种单激光双psd深孔直线度检测装置的结构示意图;
[0026]
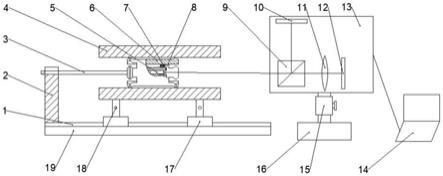
图2为本发明实施例提供的光斑位置与倾角测量模块具体光路的传播示意图;
[0027]
图3为本发明实施例提供的弹性自动定心机构的结构示意图。
[0028]
附图中:导轨1、推杆固定座2、推杆3、深孔零件4、光纤激光器5、定心机构外层6、深沟球轴承7、定心机构内层8、正方体分光棱镜9、第一二维psd 10、凸透镜11、第二二维psd 12、铝合金外框架13、数据处理模块14、高度调节杆15、磁性底座16、滑块17、v形块18、底板19。
具体实施方式
[0029]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0030]
以下结合具体实施例对本发明的具体实现进行详细描述。
[0031]
如图1所示,为本发明一个实施例提供的一种单激光双psd深孔直线度检测装置,包括深孔零件4和底板19,还包括:
[0032]
光斑位置与倾角测量模块、弹性自定心机构、进给机构、升降机构和数据处理模块14;
[0033]
所述弹性自定心机构安装在底板19上,所述进给机构安装在底板19上,所述升降机构与底板19间隔设置,所述光斑位置与倾角测量模块包括光纤激光器5、正方体分光棱镜9、第一二维psd10、凸透镜11、第二二维psd12和铝合金外框架13,所述铝合金外框架13安装在升降机构上,所述光纤激光器5安装在弹性自定心机构中,所述光纤激光器5用于发射激光,所述正方体分光棱镜9、第一二维psd10、凸透镜11和第二二维psd12均固定安装在铝合金外框架13内,且所述第一二维psd10安装在正方体分光棱镜9的正上方,所述凸透镜11安装在正方体分光棱镜9右端,且所述凸透镜11与正方体分光棱镜9之间的距离为凸透镜11的一倍焦距,所述第二二维psd12安装在凸透镜11的右端,所述第二二维psd12与凸透镜11之间的距离同为凸透镜11的一倍焦距,所述正方体分光棱镜9的几何中心、凸透镜11的光心与二维psd12的原点处于同一水平直线上,所述正方体分光棱镜9的几何中心与二维psd10的原点处于同一竖直方向上,所述铝合金外框架13靠近光纤激光器5一侧开有正方形通光孔,且所述正方形通光孔的面积大于第一二维psd10和第二二维psd12的感光面,所述数据处理模块14分别与第一二维psd10和第二二维psd12连接;
[0034]
所述弹性自定心机构用于固定光纤激光器5,所述进给机构用于带动弹性自定心机构贯穿深孔零件4,所述升降机构用于调节铝合金外框架13的高度,所述数据处理模块用于对第一二维psd10和第二二维psd12的电信号进行处理。
[0035]
在本发明实施例中,使用时,将深孔零件4放置在进给机构上,升降机构调节好铝
合金外框架13的高度,弹性自定心机构将光纤激光器5进行固定,弹性自定心机构伸入深孔零件4内,光纤激光器5发出的激光射向正方体分光棱镜9,正方体分光棱镜9将光线一分为二,一道光经折射向上传播,落在第一二维psd10的感光面上,一道光直接透过正方体分光棱镜9直线传播至凸透镜11,凸透镜11改变光线路径,并使光线落于第二二维psd 12的感光面上,数据处理模块对第一二维psd10和第二二维psd12的电信号进行处理,进给机构带动深孔零件4进行左右运动,直至光纤激光器5到达深孔零件4右端面,运动过程中数据处理模块14实时记录第一二维psd10和第二二维psd12上的数据变化值,将运动过程中所有数据进行处理,拟合出光纤激光器5在深孔零件4中的运动轨迹曲线,以此轨迹曲线作为深孔零件4的实际轴线,将深孔零件4左端面与右端面处的第一二维psd10上的坐标点数据经过角度修正后连接构造一条空间直线,以此空间直线作为深孔零件的理论轴线,比较实际轴线与理论轴线的差值来确定最终深孔零件的直线度误差。
[0036]
如图1所示,作为本发明的一种优选实施例,所述正方形通光孔上固定安装有高透光玻璃。
[0037]
在本发明实施例中,高透光玻璃的透光性保证光束进入铝合金外框架13内,同时高透光玻璃堵住正方形通光孔用于保证铝合金外框架13的密闭性,使得铝合金外框架13整体结构密封。
[0038]
如图1和图3所示,作为本发明的一种优选实施例,所述弹性自定心机构包括定心机构外层6、深沟球轴承7、定心机构内层8,所述定心机构外层6的两端均设置有多个外凸式微力弹片,所述深沟球轴承7套设在定心机构内层8上,所述深沟球轴承7外侧安装在定心机构外层6内,所述光纤激光器5安装在定心机构内层8内。
[0039]
在本发明实施例中,外凸式微力弹片与深孔零件4的内壁通过弹力紧密接触,使得定心机构外层6与深孔零件4自动定心,定心机构外层6与定心机构内层8通过深沟球轴承7连接,定心机构内层8所受摩檫力小,进而保证光纤激光器5不会旋转。
[0040]
如图1所示,作为本发明的一种优选实施例,所述进给机构包括导轨1、推杆固定座2、推杆3、滑块17与v形块18,所述推杆固定座2固定安装在底板19上,所述推杆3固定安装在推杆固定座2上,所述推杆3的末端与定心机构内层8固定连接,所述导轨1固定安装在底板19上,所述滑块17滑动连接在导轨1上,所述v形块18固定安装在滑块17上。
[0041]
在本发明实施例中,深孔零件4放置在v形块18上,伺服电机带动滑块17移动,滑块17通过v形块18带动深孔零件4移动,推杆3可轻微弯曲变形。
[0042]
如图1所示,作为本发明的一种优选实施例,所述滑块17由伺服电机驱动。
[0043]
在本发明实施例中,伺服电机通过带动丝杆转动,丝杆与滑块17螺纹配合,带动滑块17左右移动,或伺服电机带动齿轮转动,齿条与滑块17连接,齿轮与齿条啮合配合下带动齿条移动,齿条带动滑块17移动,任一方式带动滑块17移动均可。
[0044]
如图1所示,作为本发明的一种优选实施例,所述升降机构包括高度调节螺母、高度调节杆15和磁性底座16,所述高度调节杆15的一端与铝合金外框架13固定连接,所述高度调节杆15的另一端与磁性底座16固定连接。
[0045]
在本发明实施例中,通过改变高度调节杆15的高度,然后用调节螺母固定高度,便于调节铝合金外框架13的高度。
[0046]
如图1和图2所示,作为本发明的一种优选实施例,所述数据处理模块14包括a/d转
换卡和上位机,所述a/d转换卡分别与第一二维psd 10和第二二维psd 12连接,所述a/d转换卡用于将第一二维psd 10和第二二维psd 12转换为数字信号,所述上位机与a/d转换卡连接,所述上位机通过专用软件显示第一二维psd 10和第二二维psd 12感光面的二维位置坐标(x,y)与激光本身的倾斜角度(θ
x
,θy),所述倾斜角度计算公式为:
[0047][0048]
所述θ
x
为光纤激光器5在深孔零件4中相对于初始轴线在x方向上的偏转,θy为光纤激光器5在深孔零件4中相对于初始轴线在y方向上的偏转,f为所选凸透镜11的焦距。
[0049]
在本发明实施例中,第一二维psd10用于采集光斑的位置,第一二维psd10采集的数据有角度干扰,第二二维psd12的位置信息运用倾斜角度计算公式计算角度,之后在后期拟合实际轴线时,将第一psd的位置数据经过角度修正后,才是正确数据。
[0050]
本发明上述实施例中提供了一种单激光双psd深孔直线度检测装置的检测方法,步骤如下:
[0051]
步骤一、弹性自定心机构带动光纤激光器从深孔零件左端面至右端面进行检测,然后从深孔零件右端面至左端面再一次进行检测后复位;
[0052]
步骤二、将深孔零件转动90
°
后重复步骤一;
[0053]
步骤三、再将深孔零件转动90
°
后重复步骤一;
[0054]
步骤四、再将深孔零件转动90
°
后重复步骤一;
[0055]
步骤五、最终深孔零件的直线度取四次测量的平均值。
[0056]
具体操作如下
[0057]
检测时,将深孔零件4放置在v形块18上,伺服电机通过滑块17带动v形块18向左移动,使得光纤激光器5从深孔零件4的左端贯穿至右端,光纤激光器5发出的激光射向正方体分光棱镜9,正方体分光棱镜9将光线一分为二,一道光经折射向上传播,落在第一二维psd10的感光面上,一道光直接透过正方体分光棱镜9直线传播至凸透镜11,凸透镜11改变光线路径,并使光线落于第二二维psd 12的感光面上,运动过程中上位机通过数据采集软件实时记录第一二维psd10和第二二维psd12上的数据变化值,将运动过程中所有数据进行处理,拟合出光纤激光器5在深孔零件4中的运动轨迹曲线,以此轨迹曲线作为深孔零件4的实际轴线,将深孔零件4左端面与右端面处的第一二维psd10上的坐标点数据经过修正后连接构造一条空间直线,以此空间直线作为深孔零件的理论轴线,比较实际轴线与理论轴线的差值来确定最终深孔零件的直线度误差,第一二维psd10采集的数据有角度干扰,第二二维psd12的位置信息运用倾斜角度计算公式计算角度,之后在后期拟合实际轴线时,将第一二维psd10的位置数据进行角度修正;然后将深孔零件转动90
°
,同时定心机构外层6跟随深孔零件转动90
°
,进行第二次检测;第二次检测完成后,将深孔零件再次转动90
°
,同时定心机构外层6跟随深孔零件转动90
°
,进行第三次检测;第三次检测完成后,将深孔零件再次转动90
°
,同时定心机构外层6跟随深孔零件转动90
°
,进行第四次检测,最终深孔零件直线度评定值为这四次测量直线度的均值。
[0058]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。