1.本发明属于汽车零件组装设备技术领域,涉及一种用于并紧、压铆、冲切以及贴泡棉的设备。
背景技术:
2.在汽车零部件生产中,需要将水切与后三角等两个工件并紧后铆接在一起,然后对废料进行冲切,最后在两个水切工件中贴入泡棉。
3.现有技术中是采用三台设备来实现铆接、冲切、贴泡棉这三道工序的,这样不仅占用场地大而且需要更多的操作人员,极大的降低了生产效率并且增加了用人成本。此外现有技术中的将两个工件进行并紧的工序是采用人工并紧的方式,这样铆接出来的产品会存在间隙,极大的降低了产品的质量。因此,具有较大的改进空间。
技术实现要素:
4.本发明的目的是针对现有技术存在的上述问题,提出了一种用于并紧、压铆、冲切以及贴泡棉的设备。
5.本发明的目的可通过下列技术方案来实现:一种用于并紧、压铆、冲切以及贴泡棉的设备,包括:
6.并紧机构,其中所述并紧机构用于并紧两个待加工工件;
7.压铆机构,其中所述压铆机构对并紧后的工件进行压铆;
8.冲切料机构,其中所述冲切料机构对压铆后的工件进行冲切;
9.勾拉机构,其包括勾拉座、第一卡勾以及第二卡勾,所述第一卡勾与所述第二卡勾均安装于所述勾拉座,所述第一卡勾与所述第二卡勾可相对移动从而扒开工件;
10.贴泡棉机构,其中所述贴泡棉机构将泡棉安装在被扒开的工件内。
11.较佳的,所述并紧机构包括基座、支撑组件、第一驱动元件以及推动组件,所述推动组件包括压紧块、滑移座以及第三驱动元件,所述第一驱动元件与所述基座连接,所述滑移座与所述第一驱动元件联动连接,所述第三驱动元件与所述滑移座连接,所述压紧块与所述第三驱动元件联动连接,所述第三驱动元件可驱动所述压紧块抓取所述支撑组件上的一工件并且所述第一驱动元件可推动所述滑移座朝所述支撑组件上的另一工件移动从而并紧所述支撑组件上的两个工件。
12.较佳的,所述冲切料机构包括冲切组件、平移驱动元件以及升降驱动元件,所述升降驱动元件可平移地与所述平移驱动元件连接,所述冲切组件可升降地与所述升降驱动元件连接。
13.较佳的,所述冲切组件包括冲切座、上切刀、下切刀、上切刀驱动元件以及下切刀驱动元件,所述冲切座与所述升降驱动元件联动连接,所述上切刀与所述下切刀均可移动地与所述冲切座连接,所述上切刀驱动元件以及所述下切刀驱动元件均与所述冲切座固定连接,所述上切刀与所述上切刀驱动元件联动连接,所述下切刀与所述下切刀驱动元件联
动连接,所述上切刀与所述下切刀呈上下对应设置。
14.较佳的,所述冲切料机构还包括接料盒以及接料气缸,所述接料气缸与所述冲切座连接,所述接料盒与所述接料气缸联动连接,并且所述接料盒位于所述上切刀与所述下切刀的下方。
15.较佳的,还包括直线输送机构,其包括托举驱动元件以及输送驱动元件,所述输送驱动元件与所述基架连接,所述托举驱动元件与所述输送驱动元件联动连接,所述输送驱动元件驱动所述托举驱动元件靠近或远离所述支撑组件。
16.较佳的,所述压铆机构包括第二驱动元件以及压铆组件,所述压铆组件包括压铆块以及铰链压块,所述铰链压块与所述第二驱动元件以及所述支撑组件铰接,所述压铆块与所述铰链压块连接,所述第二驱动元件可驱动所述铰链压块朝所述支撑组件转动。
17.较佳的,所述第一卡勾与所述勾拉座固定连接,所述第二卡勾可移动地与所述勾拉座连接,所述勾拉机构还包括第四驱动元件、第五驱动元件以及第六驱动元件,所述第四驱动元件与所述基架连接,所述第五驱动元件可平移地与所述第四驱动元件联动连接,所述勾拉座可升降地与所述第五驱动元件联动连接,所述第六驱动元件与所述勾拉座固定连接,所述第二卡勾与所述第六驱动元件联动连接。
18.较佳的,所述贴泡棉机构包括泡棉输送机以及泡棉抓取机器人,所述泡棉抓取机器人设置有固定气爪、活动气爪以及第七驱动元件,所述活动气爪与所述第七驱动元件联动连接,所述第七驱动元件可驱动所述活动气爪远离或靠近固定气爪从而抓取所述泡棉输送机上的泡棉并且所述泡棉抓取机器人将抓取的泡棉装入被扒开的工件内。
19.较佳的,所述并紧机构还包括用于抵住工件的定位块,所述定位块靠近所述支撑组件并且所述第一驱动元件可推动两个工件抵住定位块。
20.与现有技术相比,本发明的有益效果为:
21.1、一台设备就能实现多道工序的生产,不仅减少了占地面积,还减少了设备操作人员,极大的增加了生产效率并且降低了人工成本。
22.2、通过并进机构来使两工件合并在一起,这样生产出来的两个工件之间不会有间隙存在,并且拼接的位置也十分准确。
23.3、冲切料机构可以多自由度调整移动,即使有障碍物也可以实现避让冲切。
24.4、使用勾拉机构来扒开两片水切,极大的增加了扒开的稳定性同时也不会将水切扒坏。
25.5、使用机器人将泡棉放入到两片水切之间,极大的增加了贴泡棉的稳定性。
26.6、设置有直线输送机构,工件加工完成后可以自动完成取件,十分方便。
附图说明
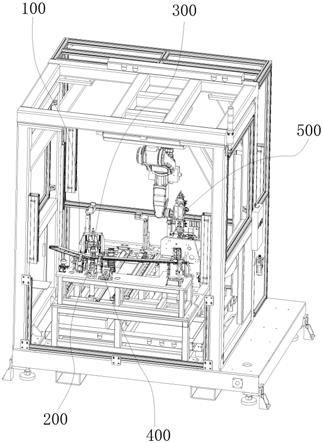
27.图1为本发明整体结构示意图。
28.图2为本发明去除外机架后的结构示意图。
29.图3为本发明并紧机构的结构示意图。
30.图4为本发明压铆机构的结构示意图。
31.图5为本发明冲切料机构的结构示意图。
32.图6为本发明冲切料机构的结构示意图。
33.图7为本发明勾拉机构的结构示意图。
34.图8为本发明贴泡棉机构的结构示意图。
35.图9为本发明直线输送机构的结构示意图。
36.图中,100、并紧机构;110、支撑组件;120、第一驱动元件;131、压紧块;132、滑移座;133、第三驱动元件;200、压铆机构;210、第二驱动元件;221、压铆块;222、铰链压块;300、冲切料机构;311、冲切座;312、上切刀;313、下切刀;314、上切刀驱动元件;315、下切刀驱动元件;320、平移驱动元件;330、升降驱动元件;340、接料盒;350、接料气缸;400、勾拉机构;410、第一卡勾;420、第二卡勾;430、第四驱动元件;440、第五驱动元件;450、第六驱动元件;460、勾拉座;500、贴泡棉机构;510、泡棉输送机;520、泡棉抓取机器人;521、固定气爪;522、活动气爪;523、第七驱动元件;600、基座;710、托举驱动元件;712、输送驱动元件;800、定位块。
具体实施方式
37.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
38.如图1-图8所示,一种用于并紧、压铆、冲切以及贴泡棉的设备,包括:并紧机构100、压铆机构200、冲切料机构300、勾拉机构400以及贴泡棉机构500。
39.并紧机构100包括支撑组件110、第一驱动元件120以及推动组件,所述推动组件与所述第一驱动元件120联动连接,所述第一驱动元件120可通过所述推动组件推动所述支撑组件110上的工件朝另一工件移动。
40.具体来说,在本实施例中,支撑组件110是用于放置工件,工件具体是后三角以及水切。
41.还需要说明的是,第一驱动元件120可以设置为气缸也可设置为液压缸等直线驱动元件,在本实施例中具体设置为气缸。推动组件可以压紧后三角,并且在第一驱动元件120的驱动下向水切靠近。
42.压铆机构200包括第二驱动元件210以及压铆组件,所述压铆组件与所述支撑组件110铰接,所述第二驱动元件210可驱动所述压铆组件朝所述支撑组件110转动。
43.具体来说,第二驱动元件210可以设置为气缸也可设置为液压缸等直线驱动元件。
44.冲切料机构300包括冲切组件,所述冲切组件用于冲切所述支撑组件110上的工件。
45.勾拉机构400包括勾拉座460、第一卡勾410以及第二卡勾420,其中,第一卡勾410以及第二卡勾420能够相对移动,在一实施例中,所述第一卡勾410固定于勾拉座460与所述第二卡勾420可移动地与勾拉座460连接,第一卡勾410以及第二卡勾420配合可扒开所述支撑组件110上的工件;在另一实施例中,第一卡勾410以及第二卡勾420均可移动地与勾拉座460连接。
46.总之,只要能够让第一卡勾410以及第二卡勾420相互靠近或者相互远离即可。
47.贴泡棉机构500包括泡棉输送机510以及泡棉抓取机器人520,所述泡棉抓取机器人520用于抓取泡棉输送机510上的泡棉并移动至所述支撑组件110上被扒开的工件内。
48.需要指出的是,本发明通过一台设备就能实现多道工序的生产,不仅减少了占地
面积,还减少了设备操作人员,极大的增加了生产效率并且降低了人工成本。
49.如图3所示,在上述实施方式的基础上,还设置有基座600,所述推动组件包括压紧块131、滑移座132以及第三驱动元件133,所述第一驱动元件120与所述基座600连接,所述滑移座132与所述第一驱动元件120联动连接,所述第三驱动元件133与所述滑移座132连接,所述压紧块131与所述第三驱动元件133联动连接,所述第三驱动元件133用于驱动所述压紧块131压紧工件并且所述第一驱动元件120推动所述滑移座132移动从而并紧所述支撑组件110上的两工件。
50.如图2、图3所示,所述并紧机构100还包括用于抵住工件的定位块800,所述定位块800靠近所述支撑组件110并且所述第一驱动元件120可推动两个工件抵住定位块800。
51.具体来说,首先将后三角与水切工件放置在支撑组件110上,此时水切工件的端部会靠紧定位块800,这样水切工件的一端就无法再朝这个方向移动,然后第三驱动元件133会带动压紧块131夹紧后三角工件。由于第三驱动元件133与压紧块131都能随着滑移座132的移动而移动,因此当第一驱动元件120驱动滑移座132向水切工件靠近时,第一驱动元件120同样也会驱动后三角工件与水切工件无缝拼接在一起。
52.优选的,第三驱动元件133可以设置为气缸也可设置为液压缸等直线驱动元件。
53.需要指出的是,通过并进机构来使两工件合并在一起,这样生产出来的两个工件之间不会有间隙存在,并且拼接的位置也十分准确。
54.如图5所示,在上述实施方式的基础上,所述冲切料机构300还包括平移驱动元件320以及升降驱动元件330,所述升降驱动元件330可平移地与所述平移驱动元件320连接,所述冲切组件可升降地与所述升降驱动元件330连接。
55.具体来说,平移驱动元件320可以带动冲切组件朝着一个方向移动从而让冲切组件到达待冲切位置的上方,同时升降驱动元件330可以使冲切组件下降从而让冲切组件到达待冲切位置。
56.如图5、图6所示,在上述实施方式的基础上,所述冲切组件包括冲切座311、上切刀312、下切刀313、上切刀驱动元件314以及下切刀驱动元件315,所述冲切座311与所述升降驱动元件330联动连接,所述上切刀312与所述下切刀313均可移动地与所述冲切座连接,所述上切刀驱动元件314以及所述下切刀驱动元件315均固定在所述冲切座311上,所述上切刀312与所述上切刀驱动元件314联动连接,所述下切刀313与所述下切刀驱动元件315联动连接,所述上切刀312与所述下切刀313呈上下对应设置。
57.具体来说,当冲切组件到达待冲切位置后,此时冲切部位刚好位于上切刀312与下切刀313之间,并且上切刀312位于下切刀313前方,然后上切刀驱动元件314会驱动上切刀312向前伸出,同时下切刀驱动元件315会驱动下切刀313缩回,这样上切刀312与下切刀313一起完成了对工件的冲切,而且冲切下的废料会位于上切刀312与下切刀313之间。
58.需要指出的是,冲切料机构300可以多自由度调整移动,即使有障碍物也可以实现避让冲切。
59.如图1、图5、图6所示,在上述实施方式的基础上,所述冲切料机构300还包括接料盒340以及接料气缸350,所述接料气缸350与所述冲切座311连接,所述接料盒340与所述接料气缸350联动连接。
60.具体来说,当冲切料机构300完成冲切后,冲切组件会回到初始位置,此时接料气
缸350会驱动接料盒340移动至借料位置,然后上切刀驱动元件314会驱动上切刀312缩回,同时下切刀驱动元件315会驱动下切刀313向前伸出,此时排废料块就会将废料从上切刀312与下切刀313之间排出至废料盒中。
61.需要指出的是,冲切料机构300可以实现废料的自动吞吐,使设备自动化程度更高。
62.如图2、图9所示,在上述实施方式的基础上,还包括直线输送机构,其包括托举驱动元件710以及输送驱动元件712,所述输送驱动元件712与所述基架连接,所述托举驱动元件710与所述输送驱动元件712联动连接,所述输送驱动元件712驱动所述托举驱动元件710靠近或远离所述支撑组件110。
63.具体来说,当各道工序完成后,托举驱动元件710会向上举起工件,然后输送驱动元件712会驱动托举驱动元件710移动至放置架,最后托举驱动元件710会下降从而将工件放置在放置架上。
64.优选的,托举驱动元件710以及输送驱动元件712可设置为气缸也可设置为液压缸等直线驱动元件。
65.需要指出的是,设置有直线输送机构,工件加工完成后可以自动完成取件,十分方便。
66.如图4所示,在上述实施方式的基础上,所述压铆组件包括压铆块221以及铰链压块222,所述铰链压块222与所述第二驱动元件210以及支撑组件铰接,所述压铆块221与所述铰链压块222连接。
67.具体来说,压铆块221是固定设置在铰链压块222上的,当两个工件并紧后,此时启动压铆机构200,由于铰链压块222与第二驱动元件210铰接同时又与支撑组件110铰接,因此其就相当于一个四连杆机构,所以第二驱动元件210会带动铰链压块222以及压铆块221翻转至工件连接处从而完成铆接。
68.优选的,第二驱动元件210可设置为气缸也可设置为液压缸等直线驱动元件。
69.如图2、图7所示,在上述实施方式的基础上,所述勾拉机构400还包括第四驱动元件430、第五驱动元件440以及第六驱动元件450,所述第四驱动元件430与所述基架连接,所述第五驱动元件440可平移地与所述第四驱动元件430联动连接,所述勾拉座460可升降地与所述第五驱动元件440联动连接,所述第六驱动元件450与勾拉座固定连接,所述第二卡勾420与所述第六驱动元件450联动连接。
70.优选的,第四驱动元件430设置为滑台气缸,第五驱动元件440以及第六驱动元件450可设置为气缸也可设置为液压缸等直线驱动元件,第四驱动元件430驱动勾拉座460平移,第五驱动元件驱动勾拉座460升降,从而使第一卡勾410以及第二卡勾420卡嵌到工件之间,然后第六气缸能够驱动第二卡勾420移动从而扒开工件。
71.需要说明的是,使用勾拉机构400来扒开两片水切,极大的增加了扒开的稳定性同时也不会将水切扒坏。
72.如图8所示,在上述实施方式的基础上,所述泡棉抓取机器人520设置有固定气爪521、活动气爪522以及第七驱动元件523,所述活动气爪522与所述第七驱动元件523联动连接,所述第七驱动元件523驱动所述活动气爪522远离或靠近固定气爪521。
73.具体来说,第七驱动元件523通过驱动活动气爪522可以将泡棉捏成不同的形态。
在本实施例中,泡棉被挤压为类似z字形的形态。
74.优选的,第七驱动元件523设置为三轴气缸。
75.需要说明的是,使用机器人将泡棉放入到两片水切工件之间,极大的增加了贴泡棉的稳定性。
76.本发明的工作原理:首先并紧机构100会将放置在支撑组件110上的后三角以及水切工件并紧并放入端盖工件;然后压铆机构200会将并紧的工件进行铆压从而使两个工件组装在一起;铆压完成后,冲切料机构300会对铆压后的工件进行冲切并收集冲切废料;冲切完成后,勾拉机构400会将两片水切的端部扒开;扒开后,泡棉抓取机器人520会抓取泡棉输送机510上的泡棉并移动至支撑组件110上被扒开的两片水切工件之间;最后加工完成的工件会通过直线输送机构移动至指定位置。
77.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
78.另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
79.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
80.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。