1.本发明涉及工业机器人技术领域,具体为一种具有抓取脱落防护功能的工业机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。在自动化流水线上,应用较为广泛的工业机器人为机械手,在生产过程中,通过机械手对产品进行抓取转运,从而使得产品的位置转移灵活性更好,可以根据实际需要将产品转送至不同的流水线上。现有的机械手在使用过程中大多通过夹持板对其进行夹持抓取,然后通过体表面的防滑板来增大产品与夹持板之间的摩擦力,在夹持转运的过程中,产品与防滑板之间会存在有细微的摩擦,在长期的使用过程中,防滑板表面的磨损逐渐明显,从而使得防滑板的防滑效果逐渐降低,当操作者未及时发现对其进行更换时,就容易在产品抓取转运过程中出现产品脱落损坏的情况,从而会给生产厂家带来一些不必要的损失。
技术实现要素:
3.为解决上述工业机器人缺乏脱落防护机构导致产品滑落容易损坏的问题,实现以上可以在产品滑落时对其进行安全防护的目的,本发明通过以下技术方案予以实现:一种具有抓取脱落防护功能的工业机器人,包括夹持板以及设置在夹持板外部的防滑板,所述夹持板的内部设置有防护机构,所述防护机构包括控制件、电机、线轮、拉绳、第一导向杆、连接板、第一弹簧、防滑块,所述防滑板的内部设置有控制件,所述夹持板的内侧面设置有电机,所述电机的外部设置有线轮,所述线轮的外表面收卷有拉绳,所述拉绳的外部设置有连接板,所述连接板的外部设置有第一弹簧,所述连接板的外部设置有防滑块,所述夹持板的内侧面设置有第一导向杆。
4.进一步的,所述连接板与夹持板的内侧面滑动连接,所述第一弹簧有夹持板的内侧面固定连接,所述防滑块与夹持板的外表面滑动连接,所述拉绳与第一导向杆的外表面滑动连接。
5.进一步的,所述控制件包括第二弹簧、滑动盒、滚轮、齿轮、扭簧、齿条、导电块、电源座,所述防滑板的内侧面设置有第二弹簧,所述第二弹簧的外部设置有滑动盒,所述滑动盒的外侧面设置有滚轮,所述滚轮的外部设置有齿轮,所述齿轮的外部设置有扭簧,所述齿轮的外表面啮合有齿条,所述齿条的外部设置有导电块,所述滑动盒的内侧面设置有电源座,可以对产品的夹持情况进行实时监测,从而使得产品抓取转运过程中的安全性更好。
6.进一步的,所述滑动盒与防滑板的内侧面滑动连接,所述滚轮的位置、规格均与防滑板的夹持端相匹配,所述扭簧与滑动盒的内侧面固定连接,所述导电块的位置、规格均与电源座相匹配,所述电机与导电块耦合,从而可以在产品脱落滑动时对电机进行通电,使得防滑块移动对产品进行夹持防滑。
7.进一步的,所述夹持板的内部设置有固定机构,所述固定机构包括移动板、牵引绳、第二导向杆、第三弹簧、固定杆、插板、固定孔、走线槽、细绳、拉环、插槽,夹持板的内侧面滑动连接有移动板,所述移动板的外部设置有牵引绳,所述牵引绳的外部设置有固定杆,所述固定杆的外部设置有第三弹簧,所述夹持板的内侧面开设有走线槽,所述走线槽的内侧面设置有第二导向杆,所述移动板的外部设置有细绳,所述细绳的外部设置有拉环,所述防滑板的外部设置有插板,所述插板的外表面开设有股的固定孔,所述夹持板的外表面开设有插槽,使得防滑板的安装拆卸过程更为简单方便,可以在防滑板磨损严重时对其进行更换处理。
8.进一步的,所述牵引绳与走线槽的内侧面滑动连接,所述牵引绳与第二导向杆的外表面滑动连接,所述第三弹簧与夹持板的内侧面固定连接。
9.进一步的,所述插槽的位置、规格均与插板相匹配,所述固定孔的位置、规格均与固定杆相匹配,所述固定杆与夹持板的内侧面滑动连接。
10.本发明提供了一种具有抓取脱落防护功能的工业机器人。具备以下有益效果:1、该具有抓取脱落防护功能的工业机器人,通过产品脱落时滑动带动滚轮转动,使得齿轮转动带动齿条移动,从而导电块与电源座接触并给电机通电,使得线轮转动对拉绳收卷并带动防滑块移动对产品进行夹持防滑,避免了产品脱落时直接掉落于载台或是地面之间直接发生碰撞导致发生损坏的情况发生,从而大大提高了产品抓取过程中的安全性,使得工业机器人的实用性以及稳定性都有效提高。
11.2、该具有抓取脱落防护功能的工业机器人,通过拉动拉环,使得移动板移动对牵引绳进行拉扯,从而固定杆移动从固定孔的内部退出,使得防滑板的移动不再受限,这样就可以对其拆卸进行更换,避免了防滑板磨损严重时拆卸不便导致其更换过程较为麻烦的情况发生,使得工业机器人在使用过程中的灵活性更好,可以满足实际使用情况的需要。
附图说明
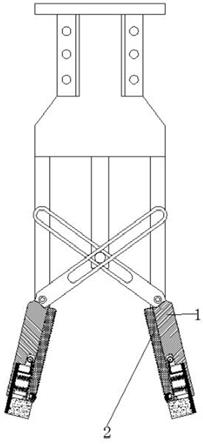
12.图1为本发明局部剖视结构示意图一;图2为本发明图1中部分结构连接关系结构示意图;图3为本发明图2中a处放大结构示意图;图4为本发明局部剖视结构示意图二;图5为本发明图4中部分结构连接关系结构示意图;图6为本发明图5中b处放大结构示意图。
13.图中:1、夹持板;2、防滑板;3、防护机构;31、控制件;311、第二弹簧;312、滑动盒;313、滚轮;314、齿轮;315、扭簧;316、齿条;317、导电块;318、电源座;32、电机;33、线轮;34、拉绳;35、第一导向杆;36、连接板;37、第一弹簧;38、防滑块;4、固定机构;41、移动板;42、牵引绳;43、第二导向杆;44、第三弹簧;45、固定杆;46、插板;47、固定孔;48、走线槽;49、细绳;410、拉环;411、插槽。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.该具有抓取脱落防护功能的工业机器人的实施例如下:请参阅图1-图6,一种具有抓取脱落防护功能的工业机器人,包括夹持板1以及设置在夹持板1外部的防滑板2,夹持板1的内部设置有防护机构3,防护机构3包括控制件31、电机32、线轮33、拉绳34、第一导向杆35、连接板36、第一弹簧37、防滑块38,防滑板2的内部设置有控制件31,控制件31包括第二弹簧311、滑动盒312、滚轮313、齿轮314、扭簧315、齿条316、导电块317、电源座318,防滑板2的内侧面设置有第二弹簧311,第二弹簧311的外部设置有滑动盒312,滑动盒312的外侧面设置有滚轮313,滚轮313的外部设置有齿轮314,齿轮314的外部设置有扭簧315,齿轮314的外表面啮合有齿条316,齿条316的外部设置有导电块317,滑动盒312的内侧面设置有电源座318,可以对产品的夹持情况进行实时监测,从而使得产品抓取转运过程中的安全性更好,滑动盒312与防滑板2的内侧面滑动连接,滚轮313的位置、规格均与防滑板2的夹持端相匹配,使得防滑板2与产品接触并对其夹持过程中,产品可以对滚轮313接触并对其进行挤压,使得第二弹簧311压缩并保证产品移动可以带动滚轮313进行转动,扭簧315与滑动盒312的内侧面固定连接,导电块317的位置、规格均与电源座318相匹配,电机32与导电块317耦合,从而可以在产品脱落滑动时对电机32进行通电,使得防滑块38移动对产品进行夹持防滑。
16.夹持板1的内侧面设置有电机32,电机32的外部设置有线轮33,线轮33的外表面收卷有拉绳34,拉绳34的外部设置有连接板36,连接板36的外部设置有第一弹簧37,连接板36的外部设置有防滑块38,连接板36与夹持板1的内侧面滑动连接,第一弹簧37有夹持板1的内侧面固定连接,防滑块38与夹持板1的外表面滑动连接,拉绳34与第一导向杆35的外表面滑动连接,夹持板1的内侧面设置有第一导向杆35。
17.夹持板1的内部设置有固定机构4,固定机构4包括移动板41、牵引绳42、第二导向杆43、第三弹簧44、固定杆45、插板46、固定孔47、走线槽48、细绳49、拉环410、插槽411,夹持板1的内侧面滑动连接有移动板41,移动板41的外部设置有牵引绳42,牵引绳42的外部设置有固定杆45,固定杆45的外部设置有第三弹簧44,牵引绳42与走线槽48的内侧面滑动连接,牵引绳42与第二导向杆43的外表面滑动连接,第三弹簧44与夹持板1的内侧面固定连接。
18.夹持板1的内侧面开设有走线槽48,走线槽48的内侧面设置有第二导向杆43,移动板41的外部设置有细绳49,细绳49的外部设置有拉环410,防滑板2的外部设置有插板46,插板46的外表面开设有股的固定孔47,夹持板1的外表面开设有插槽411,使得防滑板2的安装拆卸过程更为简单方便,可以在防滑板2磨损严重时对其进行更换处理,插槽411的位置、规格均与插板46相匹配,固定孔47的位置、规格均与固定杆45相匹配,固定杆45与夹持板1的内侧面滑动连接。
19.在工作过程中,当产品有脱落的趋势并与防滑板2之间发生相对滑动时,产品与滚轮313之间发生相对运动并带动滚轮313进行转动,滚轮313转动带动齿轮314转动,齿轮314转动带动齿条316移动,齿条316移动带动导电块317移动,导电块317在移动过程中会与电源座318接触并通电,导电块317通电时会给电机32通电,齿轮314在转动过程中还会带动扭簧315扭转进行压缩;电机32启动驱动线轮33转动,线轮33转动过程中会对拉绳34进行收卷,在第一导
向杆35的导向作用下,拉绳34受到拉扯时会带动连接板36移动并对第一弹簧37进行压缩,连接板36移动过程中会带动防滑块38移动,防滑块38移动过程中会与产品接触并对其进行夹持固定,从而可以避免产品从防滑板2之间脱落导致损坏的情况发生,使得工业机器人在进行产品抓取转运过程中的安全性以及稳定性更好;当防滑板2磨损严重需要进行更换时,操作者手动拉动拉环410,在细绳49的传动作用下,拉环410被拉动过程中会带动移动板41移动并对牵引绳42进行拉扯,在第二导向杆43的导向作用下,牵引绳42受到拉扯时会带动固定杆45移动从固定孔47的内部退出并对第三弹簧44进行压缩,使得插板46的移动不再受限,此时操作者可以通过向外拉动防滑板2将其与夹持板1分离,从而可以方便对其进行更换;在进行安装时,操作者将新的防滑板2上的插板46插在插槽411的内部,然后松开拉环410,此时移动板41不再对牵引绳42进行拉扯,在第三弹簧44回弹力的作用下,固定杆45移动复位继续与固定孔47插接,从而可以对插板46进行稳定固定,这样就可以将防滑板2稳定固定连接在夹持板1的外部,使得防滑板2的安装拆卸过程都较为方便,从而可以在需要的时候方便对其进行更换处理。
20.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
