技术特征:
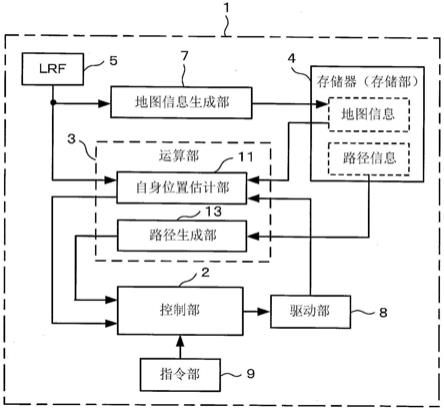
1.一种路径生成装置,其生成移动体的路径,其中,该路径生成装置具有如下单元:根据规定的地图信息而生成表示所述移动体的可侵入区域和不可侵入区域的地图信息的单元;根据所述生成的地图信息对所述可侵入区域与所述不可侵入区域的边界线应用规定的处理从而在所述边界线上设定所述移动体的中继地点的单元;距离计算单元,其根据连接了所述中继地点之间的线段的长度来计算中继地点之间的距离;以及根据所述中继地点以及所述中继地点之间的距离而生成从所述移动体的出发地到目的地的路径的单元。2.根据权利要求1所述的路径生成装置,其中,所述规定的处理是如下处理:在所述边界线上以规定的间隔设置点云,提取该点云中的连结规定的点云的直线所成的角度为一定值以上的点云,并计算角度信息。3.根据权利要求2所述的路径生成装置,其中,汇集针对构成所述点云的任意的点而连结在沿着所述边界线的两个方向上以规定的距离以上邻近的两个点的直线彼此所成的角度为一定值以上的该直线彼此的交点来设定所述中继地点。4.根据权利要求1所述的路径生成装置,其中,所述距离计算单元根据连接了所述可侵入区域中的在规定的环绕路径上相邻的中继地点彼此的线段的长度来计算所述中继地点之间的距离。5.根据权利要求1所述的路径生成装置,其中,所述距离计算单元根据将所述可侵入区域中的所述中继地点彼此全部连接的线段的长度来计算所述中继地点之间的距离。6.根据权利要求1所述的路径生成装置,其中,所述生成的地图信息是对拍摄规定的对象物和周围环境而得到的摄像数据进行图像处理而得的地图信息。7.根据权利要求1所述的移动体,其中,根据包含所述移动车的至少外形尺寸的信息来决定所述可侵入区域和所述不可侵入区域。8.根据权利要求1至7中的任意一项所述的路径生成装置,其中,所述移动体是无人搬运车。9.一种路径生成装置,其生成移动体的路径,其中,该路径生成装置具有如下单元:检测单元,其根据规定的地图信息来检测规定的对象物的边界面或线段;生成包含所述边界面或线段的地图信息的单元;对所述生成的地图信息应用规定的处理来设定所述移动体的中继地点的单元;根据连接了所述中继地点之间的线段来计算路径信息的单元;以及根据所述路径信息而生成从所述移动体的出发地到目的地的路径的单元。10.根据权利要求9所述的路径生成装置,其中,
所述检测单元从构成所述边界面或线段的点云中提取规定的长度以上的线段的端部。11.根据权利要求11所述的路径生成装置,其中,所述规定的处理是基于根据以所述端部为基准的周围的占用状态而得到的角度信息的处理。12.根据权利要求11所述的路径生成装置,其中,根据所述角度信息在从所述边界面或直线的端部延伸了规定的距离的位置设定所述中继地点。13.根据权利要求9至12中的任意一项所述的移动体,其中,所述移动体是无人搬运车。14.一种路径生成方法,具有如下工序:根据规定的地图信息而生成表示移动体的可侵入区域和不可侵入区域的地图信息;根据所述生成的地图信息在所述可侵入区域与所述不可侵入区域的边界线上设置规定的间隔的点云;对提取所述点云中的连结规定的点云的直线所成的角度为一定值以上的点云而得到的角度信息进行计算;根据所述角度信息在所述不可侵入区域内设定所述移动体的中继地点;根据连接了所述中继地点之间的线段的长度来计算中继地点之间的距离;以及根据所述中继地点以及所述中继地点之间的距离而生成从所述移动体的出发地到目的地的路径。
技术总结
从使用LiDAR而生成的地图信息提取可侵入区域的轮廓,根据设置于该轮廓的点云所成的角度,迅速地设定移动体AGV的中继地点。由此,能够容易地构建从AGV的出发地到目的地的、考虑了障碍物的安全且最短的路径。了障碍物的安全且最短的路径。了障碍物的安全且最短的路径。
技术研发人员:今田翔平 芳川知树 小川修平
受保护的技术使用者:日本电产株式会社
技术研发日:2020.08.21
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。