1.本发明涉及飞行器控制器、飞行器制动系统和操作飞行器控制器来确定制动参数的方法。
背景技术:
2.在飞行器起飞之前或者在飞行器着陆之后,飞行器必须遵循下述滑行路线:该滑行路线在着陆地点(例如跑道)与乘客或货物待进入或离开的位置(例如,终端建筑)之间延伸。已经注意到,在传统的滑行路线上,左手转弯的总和经常不同于右手转弯的总和。实际上,通常,左手转弯的数目更大。当使飞行器在滑行期间转弯时,制动通常应用至在转弯的内侧处的主起落架上,以有助于使飞行器转弯。然而,在滑行期间的该制动会引起起落架制动器的磨损和发热。此外,与右手侧起落架的制动器相比,向左转的倾向将在左手起落架的制动器中引起更多磨损和发热。
3.在着陆后影响飞行器的周转时间的因素之一是起落架制动器的温度。为了允许飞行器再次起飞,起落架制动器必须首先已经冷却为小于预定温度。期望减少制动器需要维修或更换的频率并且减少飞行器周转时间,使得飞行器能够以更大比例的制动器寿命在飞行中进行操作。
技术实现要素:
4.本发明的第一方面提供了一种飞行器控制器,该飞行器控制器配置成:确定与飞行器滑行路线相关联的信息,飞行器滑行路线与飞行器相关联;基于该信息,在着陆事件期间确定用于飞行器的第一主起落架的第一制动参数和用于飞行器的第二主起落架的第二制动参数,第一制动参数和第二制动参数被确定成在着陆事件期间导致第一主起落架与第二主起落架之间的不对称制动。
5.可选地,飞行器控制还配置成基于该信息确定在滑行路线中右手制动的总和与左手制动的总和之间的差。
6.可选地,第一制动参数和第二制动参数基于该差来确定。
7.可选地,第一制动参数和第二制动参数被确定成使得在所述着陆事件和所述飞行器沿着所述滑行路线运动的组合期间第一主起落架的至少一个制动器上的磨损与第二主起落架的至少一个制动器上的磨损的区别在于小于预定量。
8.可选地,第一制动参数和第二制动参数中的每一者包括下述各者中的至少一者:液压、制动扭矩、起落架轮的角减速度和制动许可。
9.可选地,滑行路线是飞行器由于在着陆事件之后滑行所沿着的路线。
10.可选地,第一制动参数和第二制动参数被确定成使得在飞行器滑行路线结束时第一主起落架的至少一个制动器的温度与第二主起落架的至少一个制动器的温度区别在于小于预定量。
11.本发明的第二方面提供了一种用于飞行器的飞行器制动系统,该飞行器制动系统
包括:在飞行器上的第一主起落架和从第一主起落架侧向偏移的第二主起落架;和飞行器控制器,该飞行器控制器配置成在飞行器的着陆事件期间确定用于第一主起落架的第一制动参数和用于第二主起落架的第二制动参数,其中,飞行器控制器配置成基于指示与飞行器相关联的飞行器滑行路线的信息来确定第一制动参数和第二制动参数,第一制动参数和第二制动参数被确定为在着陆事件期间导致第一主起落架与第二主起落架之间的不对称制动。
12.可选地,该信息包括与飞行器运动相关联的历史信息。
13.可选地,历史数据包括与飞行器滑行路线相关联的历史数据。
14.可选地,飞行器制动系统还包括下述输入装置:该输入装置能够由操作者在着陆事件期间进行操作,以通过确定用于第一主起落架的替代性第一制动参数和/或用于第二主起落架的替代性第二制动参数来超越控制飞行器控制器。
15.可选地,所述飞行器制动系统的飞行器控制器包括本发明的第一方面的飞行器控制器。飞行器制动系统的飞行器控制器可以具有上述特征中的任何特征作为可选用于本发明的第一方面的飞行器控制器。
16.本发明的第三方面提供了一种操作飞行器控制器以确定制动参数的方法,制动参数用于对飞行器上彼此侧向偏移的第一主起落架和第二主起落架中的每一者的至少一个轮进行制动,该方法包括:确定指示与飞行器相关联的飞行器滑行路线的信息;以及基于该信息,在飞行器的着陆事件期间确定用于第一主起落架和第二主起落架中的每一者的相应制动参数,制动参数被确定成在着陆事件期间导致由第一主起落架和第二主起落架引起的不对称制动。
17.可选地,确定指示滑行路线的信息包括从能够由操作者操作的输入装置接收信息。
18.可选地,该方法还包括向操作者提供与制动参数相关联的指示。
19.可选地,该方法还包括从操作者接收所确定的制动参数将在着陆事件期间使用的确认。
20.可选地,确定制动参数的步骤包括基于在滑行路线中右手制动的总和与左手制动的总和之间的差将制动参数确定成使得第一主起落架的制动与第二主起落架的制动的区别在于所选定的量。
21.可选地,确定制动参数包括将制动参数确定使得在着陆事件和飞行器沿着滑行路线运动的组合期间第一主起落架的至少一个制动器的磨损与第二主起落架的至少一个制动器的磨损的区别在于小于预定量。
22.可选地,确定制动参数包括将制动参数确定成使得在继着陆事件之后飞行器滑行路线结束时第一主起落架的至少一个制动器的温度与第二主起落架的至少一个制动器的温度区别在于小于预定量。
23.可选地,制动参数用于自动应用在着陆事件期间的预定时间处。
24.可选地,制动参数包括要提供给操作者的制动许可,以分别用于第一起落架的制动器和第二起落架的制动器的致动。
25.本发明的第四方面提供了一种非暂态性计算机可读存储介质,该非暂态性计算机可读存储介质存储下述指令:所述指令在由飞行器控制器执行的情况下使控制器实现本文
中描述的方法。
26.本发明的第五方面提供了一种飞行器控制器,该飞行器控制器配置成:确定在与飞行器相关联的飞行器滑行路线中右手制动的总和与左手制动的总和之间的差;以及基于所述差,确定用于飞行器的第一主起落架的第一制动参数和用于飞行器的第二主起落架的第二制动参数,第一制动参数和第二制动参数在着陆事件期间使用。
27.本发明的第六方面提供了一种飞行器,该飞行器包括根据本发明的第一方面的飞行器控制器、或根据本发明的第二方面的飞行器制动系统、或根据本发明的第四方面的非暂态性计算机可读存储介质。
附图说明
28.现在将参照附图仅通过示例的方式描述本发明的实施方式,在附图中:
29.图1示出了飞行器的滑行路线的示例。
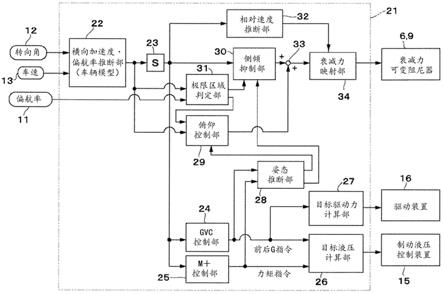
30.图2示出了本发明的一个实施方式的示例飞行器制动系统的示意图。
31.图3示出了根据本发明的一个实施方式的操作飞行器控制器以确定制动参数的示例方法的流程图。
32.图4示出了本发明的一个实施方式的非暂态性计算机可读存储介质的示例的示意图。
33.图5示出了本发明的一个实施方式的示例飞行器的示意性等距视图。
具体实施方式
34.图1示出了飞行器1可以在着陆地点比如跑道3与起始地或目的地比如终端建筑物4之间采用的示例滑行路线。滑行路线包括由飞行器1在完成着陆事件(例如,飞行器已经与地面接触并且已经充分放缓,据说已经着陆)之后采用的路线。如图1中所示,滑行路线可以由转弯加标点的特定数目的区段组成(左手侧或右手侧)。例如,从跑道3至终端4的一个这种滑行路线可以包括区段2a、2b、2c、2d、2e和2f。从图1中可以看出,这种滑行路线将包括三个90度的左手转弯和两个90度右手转弯。因此,左手转弯的相应总和与右手转弯的相应总和之间的差是90度(向左)。从终端4至跑道3的一个替代滑行路线可以包括区段2f、2g、2h、2c和2i。同样,如图1中所看到的,该路线需要比右手转弯(两个,每个90度)更多的左手转弯(三个,每个90度)以便飞行器与跑道对准,并且因此同样左手转弯的相应总和与右手转弯的相应总和之间的90度(向左)的差。
35.这可能意味着,在沿着上述路线中的每个路线的滑行过程内,相比于飞行器1的右手侧上的起落架(右手制动),更多的制动将应用于飞行器1的左手侧上的起落架(左手制动)。反过来,如上所描述,与右手起落架的制动器中相比,这可能在左手起落架的制动器中导致更多磨损和发热。因此,与右手起落架的制动器相比,左手起落架的制动器将需要更长时间冷却并且将更快地磨损。
36.尽管箭头在区段上示出,但这些箭头只是说明了一个示例滑行路线。飞行器可以沿任一方向沿着这些区段行进。此外,尽管在图1中示出了仅90度转弯,但这仅仅是出于简单起见。实际上,部分转弯或全部转弯可能不同于90度。
37.图2示出了根据一个实施方式的飞行器1的飞行器制动系统13。飞行器制动系统13
包括在飞行器1上的第一主起落架8和与第一主起落架8侧向偏移的第二主起落架9。例如,第一主起落架8可以设置在飞行器1的左手侧上并且第二主起落架9可以设置在飞行器1的右手侧上。飞行器制动系统13还包括飞行器控制器5。飞行器控制器5配置成在着陆事件期间、比如跑道3处的着陆事件期间确定用于第一主起落架8的第一制动参数和用于第二主起落架9的第二制动参数。
38.飞行器控制器5配置成基于指示与飞行器相关联的飞行器滑行路线的信息来确定第一制动参数和第二制动参数,使得第一制动参数和第二制动参数在飞行器着陆事件期间导致第一主起落架8与第二主起落架9之间的不对称制动。在一些实施方式中,飞行器控制器5配置成确定与飞行器1的滑行路线(例如,上面参照图1讨论的滑行路线中的一种滑行路线)相关联的信息。
39.在一些实施方式中,指示飞行器滑行路线的信息可以包括下述各者中的一者或更多者:一个或更多个机器可读的机场地图、当前坐标(比如全球定位系统(gps)坐标)和飞行器1的航向、目的地的坐标(比如gps坐标)、描述路线的指令、和/或来自基于地面指示符的信息(例如标志和/或灯)。
40.在一些实施方式中,第一主起落架8和第二主起落架9布置在飞行器1的机身的纵向轴线的任一侧上。例如,第一主起落架8可以设置在飞行器1的左机翼下方,并且第二主起落架9可以设置在飞行器1的右机翼下方。在该示例中,制动第一主起落架8将导致飞行器1向左手转弯,并且制动第二主起落架9导致飞行器1向右转弯。
41.在一些实施方式中,飞行器控制器5配置成确定在滑行路线中右手制动的总和与左手制动的总和之间的差。然后,第一制动参数和第二制动参数可以基于该差来确定。例如,飞行器控制器5可以确定在滑行路线中具有三个左手转弯和两个右手转弯,并且确定具有比右手制动更多的左手制动。制动参数可以根据这种差来确定。在一些实施方式中,飞行器控制器5可以基于转弯的长度和/或角度、和/或基于转弯导航期间的飞行器速度来确定制动参数。例如,取决于转弯角度,与相对长的转弯相比,相对短的转弯可能需要更小的制动量。
42.在一些实施方式中,第一制动参数和第二制动参数被确定成使得在着陆事件和飞行器沿着滑行路线运动的组合期间第一主起落架8的至少一个制动器10的磨损与第二主起落架9的至少一个制动器12的磨损的区别在于小于预定量。在一些实施方式中,预定量在约1%与20%之间或约2%与10%之间或约3%与5%之间。试图以该方式均衡制动器10、12的磨损有助于避免制动器中的一者比另一者使用更多并且因此避免比另一者更快地磨损完,这将在其他方面需要相对早期的制动检查或更换。此外,这还可以使由制动器10、12中的任一制动器达到的最大温度降低,使得制动器冷却时间以及因此飞行器周转时间可以减少。
43.在一些实施方式中,第一制动参数和第二制动参数被确定成使得在继着陆事件之后飞行器滑行路线结束时第一主起落架8的至少一个制动器10的温度与第二主起落架9的至少一个制动器12的温度区别在于小于预定量。在一些实施方式中,预定量在约1%与20%之间或约2%与10%之间或约3%与5%之间。试图以该方式均衡制动器10、12的温度可以使由制动器10、12中的任一制动器达到的最大温度降低,使得制动器冷却时间以及因此飞行器周转时间可以减少。
44.在一些实施方式中,制动参数中的每个制动参数可以限定下述各者中的至少一
者:液压、制动扭矩、起落架轮的角减速度或制动许可。此外,制动参数中的每个制动参数可以包括液压、制动扭矩和/或角减速度的组合。
45.在一些实施方式中,如先前关于图1所讨论的,滑行路线可以是飞行器1由于着陆事件之后滑行所沿着的路线。替代性地或附加地,滑行路线可以是飞行器1由于在起飞之前行进的路线。在一些实施方式中,滑行路线可以在着陆事件将发生或已经发生的同一机场处。在一些实施方式中,滑行路线在着陆事件将发生的不同机场处。例如,滑行路线可以包括飞行器1在第一机场处在起飞之前行进所沿着的路线,而着陆事件在起飞后发生在另一、目的地机场处。在一些实施方式中,滑行路线可以包括飞行器1在第一位置/机场处由于在起飞之前行进所沿着的路线以及飞行器1在第二位置/机场处由于着陆事件之后行进所沿着的路线。
46.在一些实施方式中,与飞行器滑行路线相关联的信息包括与飞行器运动相关联的历史数据。例如,历史数据可以是存储在形成飞行器制动系统13的一部分的本地数据库6上的历史数据,以及/或者历史数据可以存储在远离飞行器制动系统13、比如远离飞行器1的数据库7上。在一些实施方式中,历史数据可以由操作者、比如飞行机组人员的成员或技术人员输入控制器5中或数据库6、7中。在一些实施方式中,历史数据可以通过基于地面的系统而传输至本地数据库6。例如,历史数据可以在机场处在接近着陆时和/或在起飞之前从地面传输至飞行器1。
47.在一些实施方式中,历史数据包括与飞行器滑行路线相关联的历史数据。附加地或替代性地,历史数据可以包括关于一个或更多个特定位置/机场处的一个或更多个滑行路线、一个或更多个跑道的条件/特性和/或天气条件的历史数据。例如,历史数据可以指示机场处的最有可能的滑行路线。该历史数据可以允许飞行器控制器5在已知精确的滑行路线之前预测滑行路线。
48.在一些实施方式中,飞行器制动系统13可以包括输入装置14,该输入装置14能够由操作者、比如飞行机组人员的成员进行操作,以超越控制飞行器控制器5。例如,操作者可以在可能需要最大制动的紧急着陆的情况下超越控制飞行器控制器5。输入装置14可以允许操作者在着陆事件期间输入用于第一主起落架8的替代性第一制动参数和/或用于第二主起落架9的替代性第二制动参数。有利地,这将制动参数的最终决定留给操作者。
49.在一些实施方式中,飞行器制动系统13可以包括本文中描述的任何飞行器控制器5。
50.图3示出了操作飞行器控制器以确定制动参数的方法30,制动参数用于对飞行器上彼此侧向偏移的第一主起落架8和第二主起落架9中的一者的至少一个轮进行制动。例如,飞行器控制器可以是本文中讨论的飞行器控制器中的任何一种飞行器控制器。
51.方法30包括:确定31指示与飞行器1相关联的飞行器滑行路线的信息;并且基于该信息,在飞行器1的着陆事件期间确定32用于第一主起落架8和第二主起落架9中的每一者的相应制动参数。制动参数被确定成在着陆事件期间导致由第一主起落架8和第二主起落架9引起的不对称制动。
52.在一些实施方式中,指示滑行路线的信息可以从能够由操作者比如飞行机组人员的成员进行操作的输入装置14接收。例如,一旦操作者知道飞行器1由于着陆事件之后滑行的地点(例如,登机口号码),他们可以确定滑行路线并将滑行路线输入到输入装置中。替代
性地或附加地,操作者可以将目的地(例如,登机口号码)输入到输入装置14中,并且控制器可以基于目的地来确定滑行路线。
53.在一些实施方式中,方法30可以包括向操作者比如飞行机组人员的成员提供33与制动参数相关联的指示。在一些实施方式中,该指示可以包括制动参数值的指示和/或可以包括已经确定制动参数的指示。例如,制动参数可以在飞行器1的驾驶舱中的显示器上示出给操作者。例如,该指示可以是视觉指示和/或可听指示。
54.在一些实施方式中,方法30还可以包括从操作者比如飞行机组人员的成员接收34所确定的制动参数将在着陆事件期间使用的确认。有利地,这允许操作者判定是否使用所确定的制动参数。例如,操作者可以判定在紧急的情况下不使用所确定的制动参数。
55.在一些实施方式中,确定32制动参数可以包括基于右手制动的总和与左手制动的总和之间的差将制动参数确定成使得在滑行路线中第一主起落架8的制动与第二主起落架9的制动的不同于之处在于所选定的量。附加地或替代性地,确定制动参数可以包括将确定制动参数成使得在着陆事件和飞行器1沿着滑行路线2的运动的组合期间第一主起落架8的至少一个制动器10的磨损与第二主起落架9的至少一个制动器12的磨损区别在于小于预定量。在一些实施方式中,预定量在约1%与20%之间或约2%与10%之间或约3%与5%之间。试图以该方式均衡制动器10、12的磨损有助于避免制动器中的一者比另一者使用更多并且因此避免比另一者更快地磨损完,这将在其他方面需要相对早期的制动检查或更换。此外,这还可以使由制动器10、12中的任一制动器达到的最大温度降低,使得制动器冷却时间以及因此飞行器周转时间可以减少。
56.在一些实施方式中,确定32制动参数可以包括将制动参数确定成使得在继着陆事件之后飞行器滑行路线结束时第一主起落架8的至少一个制动器10的温度与第二主起落架9的至少一个制动器12的温度区别在于小于预定量。在一些实施方式中,预定量在约1%与20%之间或约2%与10%之间或约3%和5%之间。试图以该方式均衡制动器10、12的温度可以使由制动器10、12中的任一制动器达到的最大温度降低,使得制动器冷却时间以及因此飞行器周转时间可以减少。
57.在一些实施方式中,制动参数可以自动地应用在着陆事件期间的预定时间处。例如,制动参数可以在接收飞行器1处于地面上的指示之后应用。例如,这种指示可以由设置在起落架上或飞行器上的其他地方的传感器提供。有利地,这允许操作者比如飞行机组人员的成员集中精力在着陆事件的其他方面上,而不需要手动地应用制动参数。
58.在一些实施方式中,控制器可以配置成基于操作者的输入来确定飞行器1应该从跑道3转弯的时刻。制动参数可以至少部分地基于该确定来确定。
59.在一些实施方式中,制动参数包括要提供给操作者的制动许可。因此,当操作者向第一主起落架8或第二主起落架9中的任一者或两者应用制动时,所提供的制动量与制动参数相关。
60.图4示出了根据一个实施方式的非暂态性计算机可读存储介质40的示意图。非暂态性计算机可读存储介质40存储指令43,所述指令330在由飞行器控制器41的处理器42执行的情况下使处理器42实行本文中所描述的方法中的一种方法。在一些示例中,飞行器控制器41是上面参照图2所描述的飞行器控制器5或本文中描述的飞行器控制器的变型。指令43可以包括用以执行上面参照图3描述的方法30中的任何方法的指令。
61.在一些实施方式中,飞行器控制器5、41配置成:确定在与飞行器1相关联的飞行器滑行路线中右手制动的总和与左手制动的总和之间的差;以及基于该差,确定用于飞行器1的第一主起落架8的第一制动参数和用于飞行器1的第二主起落架9的第二制动参数,第一制动参数和第二制动参数在着陆事件期间被使用。
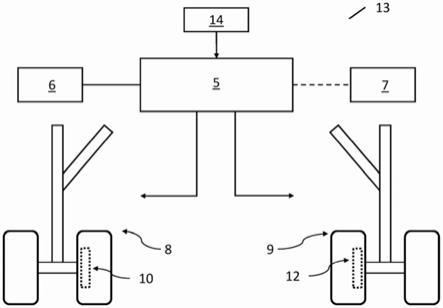
62.图5示出了包括如本文中所描述的飞行器制动系统的飞行器1。飞行器1包括第一主起落架8和第二主起落架9以及飞行器控制器5。飞行器控制器5可以是上面讨论的任何飞行器控制器。该飞行器1还包括如参照图4所描述的非暂态性计算机可读介质。
63.应当注意的是,除非另有明确说明,否则本文中所使用的术语“或”应当被解释为表示“和/或”。
64.以上实施方式应理解为本发明的说明性示例。设想了本发明的其他实施方式。应当理解的是,关于任何一个实施方式所描述的任何特征可以被单独使用、或者与描述的其他特征结合使用,并且也可以与实施方式中的任何其他实施方式或者实施方式中的任何其他实施方式的任何组合的一个或更多个特征结合使用。此外,在不脱离所附权利要求中所限定的本发明的范围的情况下,还可以采用以上未描述的等同方案和改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。