1.本公开涉及使用于汽车等车辆的车辆运动控制装置。
背景技术:
2.例如在专利文献1中记载了一种车辆,其进行gv控制(g-vectoring控制)与力矩控制(moment 控制),该gv控制根据基于车辆的横向加速度计算的加减速指令值使4轮中的左右轮产生大致相同的驱动力或者制动力而控制加减速,该力矩控制根据基于横向加速度计算的车辆横摆力矩指令值使4轮中的左右轮产生不同的驱动力或者制动力而控制横摆力矩。专利文献2中记载了一种车辆运动控制装置,其通过考虑由gv控制(g-vectoring控制)的指令产生的车辆的俯仰动作而控制衰减力可变阻尼器,从而兼顾侧倾控制与前下俯仰指令。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014-069766号公报(专利第5970322号公报)
6.专利文献2:日本特开2013-071558号公报(专利第5809506号公报)
技术实现要素:
7.发明将要解决的课题
8.专利文献2的车辆运动控制装置在转向时考虑使4轮中的左右轮产生大致相同的驱动力或者制动力的gv控制而控制衰减力可变阻尼器。但是,专利文献2的车辆运动控制装置在转向时未考虑使左右轮产生不同的驱动力或者制动力的力矩控制。因此,例如在进行力矩控制的车辆中使用了专利文献2的技术的情况下,存在因力矩控制所引起的侧倾力矩而侧倾姿态的变化变得过大、或者过小的可能性。
9.本发明的一实施方式的目的在于提供能够一种车辆运动控制装置,其在控制横摆力矩的车辆中能够减少侧倾姿态的变化被助长或者抑制的情况。
10.用于解决课题的手段
11.本发明的一实施方式为一种车辆运动控制装置,其用于具有制动驱动力控制器与多个力产生装置的车辆,所述制动驱动力控制器在车辆转向时调整制动驱动力,所述多个力产生装置分别夹装设置在所述车辆的车身与多个车轮之间,能够调整所述车身与所述各车轮之间的力,所述车辆运动控制装置还具有调整所述各力产生装置的力的控制部,所述控制部根据所述车身的转弯状态计算成为目标的目标侧倾量,所述控制部基于所述车辆的横向加速度的变化率与产生横摆力矩的横摆力矩指令值,推断在所述车辆产生的侧倾量,并向所述力产生装置输出使该推断出的侧倾量接近所述目标侧倾量的指令值。
12.根据本发明的一实施方式,在控制横摆力矩的车辆中能够减少侧倾姿态的变化被助长或者抑制的情况。
附图说明
13.图1是表示搭载有实施方式的车辆运动控制装置的4轮汽车的立体图。
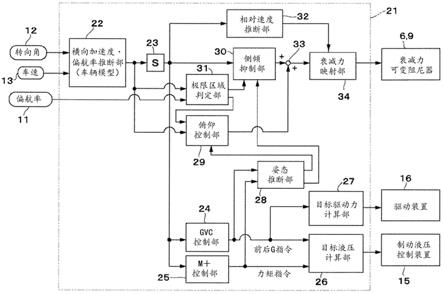
14.图2是表示第一实施方式的车辆运动控制装置的控制框图。
15.图3是表示横向加速度(gy)、加减速指令(gx_gvc)、力矩指令(m )、侧倾角、俯仰角及悬架控制指令(对于衰减力可变阻尼器的衰减力指令)的时间变化的一个例子的特性线图。
16.图4是表示第二实施方式的车辆运动控制装置的控制框图。
具体实施方式
17.以下,列举将实施方式的车辆运动控制装置搭载于4轮汽车的情况为例,参照添附附图进行说明。
18.图1至图3示出了第一实施方式。在图1中,车身1构成了车辆的主体。在车身1的下侧例如设有左、右的前轮2(也称作车轮2)与左、右的后轮3(也称作车轮3)。在车辆的车身1与多个车轮2、3之间分别夹装设置有多个衰减力调整式减震器6、9。
19.若具体地进行说明,在左、右的前轮2侧与车身1之间夹装前轮侧的悬架装置4、4而设置。各悬架装置4由左、右的悬架弹簧5(以下,称作弹簧5)和与各弹簧5并列地设于左、右的前轮2侧与车身1之间的左、右的衰减力调整式减震器6(以下,称作衰减力可变阻尼器6)构成。衰减力可变阻尼器6构成了能够调整车身1与各车轮2之间的力的力产生装置。衰减力可变阻尼器6与后述的控制器21一同构成了使用于车辆的悬架控制装置。
20.另一方面,在左、右的后轮3侧与车身1之间夹装后轮侧的悬架装置7、7而设置。各悬架装置7由左、右的悬架弹簧8(以下,称作弹簧8)和与各弹簧8并列地设于左、右的后轮3侧与车身1之间的左、右的衰减力调整式减震器9(以下,称作衰减力可变阻尼器9)构成。衰减力可变阻尼器9构成了能够调整车身1与各车轮3之间的力的力产生装置。衰减力可变阻尼器9与后述的控制器21一同构成了使用于车辆的悬架控制装置。
21.这里,各悬架装置4、7的衰减力可变阻尼器6、9使用衰减力调整式的液压缓冲器而构成。在衰减力可变阻尼器6、9上,为了将其衰减力特性从刚性特性(硬特性)连续地调整到柔性特性(软特性),附属设置有由衰减力调整阀、比例螺线管等构成的促动器(未图示)。另外,衰减力调整用的促动器并非必须使衰减力特性连续地变化的构成,也可以是以2个阶段或者3个阶段以上断续地进行调整的构成。另外,衰减力可变阻尼器6、9只要能够切换衰减力即可,例如也可以是气动阻尼器或者电磁阻尼器(电动阻尼器)。
22.即,在第一实施方式中,列举具备作为力产生装置的衰减力调整式减震器(衰减力可变阻尼器6、9)的半主动悬架为例进行说明,但例如也可以使用具备er阻尼器(电气粘性流体阻尼器)的半主动悬架、具备空气弹簧(气动促动器)的空气悬架、具备液压促动器的液压主动悬架、液压稳定装置等各种缸体装置(促动器)。另外,也可以使用具备直动式的线性马达、旋转式的马达等电动促动器的电磁悬架装置、电磁式稳定装置。总之,力产生装置只要是能够在车身1与车轮2、3之间调整力的装置,就能够使用各种力产生装置。
23.偏航率传感器11设于车身1。偏航率传感器11例如检测绕车辆的重心产生的自转方向的变化(偏航率),并将该检测信号向控制器21输出。转向角传感器12设于车身1。转向角传感器12检测车辆的驾驶员(driver)在转弯行驶时等操作方向盘(handle)时的转向角,
并将该检测信号向控制器21输出。车速传感器13例如检测车辆的行驶速度(车速),并将该检测信号向控制器21输出。
24.制动液压控制装置15搭载于车身1。制动液压控制装置15与后述的控制器21的gvc控制部24、m 控制部25、目标液压计算部26(都参照图2)等一同构成了在车辆的转向时产生制动力的制动力控制单元。制动液压控制装置15例如按照车辆的驾驶员对制动踏板的操作与来自控制器21的控制信号(制动信号)产生制动液压,并且进行使该制动液压增加、保持或者减少的控制。
25.在各前轮2侧与各后轮3侧设有由盘式制动器等构成的轮缸(均未图示)。轮缸在被供给被制动液压控制装置15可变控制的制动液压时,对相应的车轮(各前轮2与各后轮3中的某一个)赋予制动力,由此执行每个车轮2、3的减速控制。制动液压控制装置15例如由向每个车轮2、3的轮缸单独供给制动液压的esc(液压供给装置)构成。
26.另外,在实施方式中,作为对车辆赋予制动力的制动装置,以通过液压产生制动力的液压制动装置为例,但例如也可以使用通过电动马达产生制动力的电动制动装置。在该情况下,制动液压控制装置15成为制动力控制装置,目标液压计算部26成为求出与电动马达的控制电流对应的目标制动力的目标制动力计算部。
27.驱动装置16(仅在图2中图示)搭载于车身1。驱动装置16与后述的控制器21的gvc控制部24、目标驱动力计算部27(都参照图2)等一同构成了在车辆的转向时产生驱动力的驱动力控制单元。驱动装置16例如按照车辆的驾驶员对加速踏板的操作与来自控制器21的控制信号(驱动信号)使各前轮2侧产生驱动力,从而执行加速控制。驱动装置16例如由车辆的发动机、行驶用电动马达等驱动车轮的原动机构成。在实施方式中,车辆例如为前轮2、2成为驱动轮的前轮驱动车辆。而且,制动液压控制装置15和驱动装置16与控制器21一同构成了在车辆的转向时产生制动驱动力(制动力与驱动力中的至少一方的力)的制动驱动力控制单元(制动力控制单元以及/或者驱动力控制单元)。即,车辆具有制动驱动力控制单元(制动力控制单元与驱动力控制单元中的至少一方)。另外,控制器21构成了在车辆的转向时调整制动驱动力(制动力与驱动力中的至少一方的力)的制动驱动力控制器(制动力控制器以及/或者驱动力控制器)。即,车辆具有制动驱动力控制器(制动力控制器与驱动力控制器中的至少一方)。
28.这里,制动液压控制装置15以及驱动装置16基于来自后述的gvc控制部24的前后g指令(即,基于车辆的横向加速度计算的加减速指令值),使4轮(前轮2、后轮3)中的左右轮2、3产生大致相同的驱动力或者制动力,由此进行控制车辆的加减速的gv控制(g-vectoring控制)。另外,制动液压控制装置15基于来自后述的m 控制部25的力矩指令(即,基于横向加速度计算的车辆横摆力矩抑制指令值),使4轮(前轮2、后轮3)中的左右轮2、3产生不同的驱动力或者制动力,由此进行控制车辆的横摆力矩的力矩控制(moment 控制、m 控制、横摆力矩控制)。即,在实施方式中,如图3所示,根据车辆转弯时的横向加速度的变化进行gv控制以及力矩控制。
29.控制器21例如包含具备运算处理装置(cpu)、存储装置(存储器)等的微计算机而构成。控制器21与制动液压控制装置15以及驱动装置16一同构成了在车辆的转向时产生制动驱动力的制动驱动力控制单元。控制器21相当于在车辆的转向时调整制动驱动力的制动驱动力控制器。另外,控制器21构成了具有调整各衰减力可变阻尼器6、9的力的控制部(衰
减力调整控制部)的车辆运动控制装置。控制器21根据基于车辆的横向加速度计算的前后g指令(加减速指令值)控制制动液压控制装置15以及/或者驱动装置16,从而进行gv控制。即,控制器21基于车辆的横向加速度的变化率(横向加速度)计算加减速指令值(前后g指令),根据该加减速指令值由制动液压控制装置15以及/或者驱动装置16产生制动驱动力,从而使车辆产生加减速。
30.另外,控制器21根据基于横向加速度计算的横摆力矩指令值控制制动液压控制装置15,从而进行力矩控制。即,控制器21基于车辆的横向加速度的变化率(横向加速度)计算横摆力矩指令值(力矩指令),根据该横摆力矩指令值由制动液压控制装置15产生制动力,由此使车辆产生横摆力矩。另外,在搭载于车辆的驱动装置16具备能够使左右轮产生不同的驱动力的电磁离合器等驱动力分配装置的构成的情况下,也可以根据横摆力矩指令值使左右轮产生不同的驱动力,从而使车辆产生横摆力矩。
31.然而,前述的专利文献2的车辆运动控制装置在转向时考虑使4轮中的左右轮产生大致相同的驱动力或者制动力的gv控制而控制衰减力可变阻尼器。但是,专利文献2的车辆运动控制装置在转向时未考虑使左右轮产生不同的驱动力或者制动力的力矩控制。因此,例如在进行力矩控制的车辆、或者进行力矩控制以及gv控制的车辆中使用了专利文献2的技术的情况下,存在因力矩控制而在车辆产生的侧倾力矩导致侧倾姿态的变化变得过大、或者过小的可能性。由此,存在车辆的姿态变化变大、对驾驶员,乘员带来不适感的可能性。
32.即,力矩控制通过使左右轮产生不同的驱动力或者制动力(例如使单轮产生驱动力或者制动力),控制车辆的横摆力矩。但是,由于该力矩控制所引起的侧倾力矩,有时会不必要地助长或抑制侧倾。因此,在实施方式中,根据力矩控制独立地调整力产生装置(衰减力可变阻尼器6、9)的力。更具体而言,在实施方式中,通过与力矩控制和gv控制的控制指令相应的ff控制,根据值对悬架控制指令进行4轮独立的增减。由此,消除力矩控制所引起的侧倾的助长或者抑制,成为连贯的车辆运动,从而能够提高操纵稳定性。
33.因此,如图2所示,控制器21的输入侧连接于偏航率传感器11、转向角传感器12以及车速传感器13,输出侧连接于衰减力可变阻尼器6、9(的促动器)、制动液压控制装置15以及驱动装置16。控制器21具备横向加速度
·
偏航率推断部22、微分部23、gvc控制部24、m 控制部25、目标液压计算部26、目标驱动力计算部27、姿态推断部28、俯仰控制部29、侧倾抑制部30、极限区域判定部31、相对速度推断部32、加法部33、衰减力映射部34。
34.控制器21的横向加速度
·
偏航率推断部22被从转向角传感器12输入转向角,被从车速传感器13输入车速。横向加速度
·
偏航率推断部22基于由转向角传感器12检测出的转向角的信号与由车速传感器13检测出的车速的信号,推断(计算)横向加速度以及偏航率。横向加速度
·
偏航率推断部22例如根据转向角与车速,使用车辆模型推断横向加速度以及偏航率。横向加速度
·
偏航率推断部22将推断出的横向加速度向微分部23以及俯仰控制部29输出,将推断出的偏航率向极限区域判定部31输出。横向加速度
·
偏航率推断部22具备滤波器部。滤波器部对于横向加速度与偏航率分别进行用于再现动态特性的滤波处理。即,根据转向角与车速使用车辆模型推断出的推断横向加速度与偏航率成为忽略了从方向盘被转向起到实际上在车身1分别产生横向加速度与偏航率为止的动态特性的信号。因此,横向加速度
·
偏航率推断部22的滤波器部通过对动态特性进行了近似的lpf(低通滤波器)再现动力学。
35.微分部23被从横向加速度
·
偏航率推断部22输入横向加速度。微分部23通过对由横向加速度
·
偏航率推断部22推断出的横向加速度进行微分,计算横向加速度(跃度)。即,微分部23通过“车辆模型”与“用于考虑车辆动力学的lpf”对由横向加速度
·
偏航率推断部22计算出的推断横向加速度进行微分,计算横向加速度。由微分部23计算出的横向加速度被输出至相对速度推断部32、侧倾抑制部30、gvc控制部24以及m 控制部25。
36.用于进行gv控制(g-vectoring控制)的gvc控制部24根据车辆的横向加速度控制车辆的减速度。即,gvc控制部24基于由微分部23计算出的横向加速度,计算出应由车辆的左右轮2、3产生的驱动力或者制动力的指令即前后g指令gx_gvc(也称作加减速指令gx_gvc)。在该情况下,如图3所示,在gv控制中,在打入横向加速度(gy)增加的方向盘时,使左右轮2、3产生相同的制动力。在图3中,对车轮2、3标注黑色箭头来表示制动力或者驱动力。如图3所示,在打入方向盘时,对左右的前后轮2、3赋予与加减速指令gx_gvc(负的加速度指令)相应的制动力。另外,在gv控制中,在打回横向加速度(gy)减少的方向盘时,使左右轮2、3产生相同的驱动力。即,在打回方向盘时,对左右的前轮2、2赋予与加减速指令gx_gvc(正的加速度指令)相应的驱动力。
37.gvc控制部24例如包含滤波器部以及增益乘法部而构成。gvc控制部24利用滤波器部对横向加速度进行lpf处理,利用增益乘法部乘以增益,由此作为目标前后加速度(加减速指令gx_gvc)。即,在gvc控制部24的滤波器部中,对由微分部23计算出的横向加速度进行使用了低通滤波器“lpf”的滤波处理。在gvc控制部24的增益乘法部中,通过对滤波处理后的横向加速度乘以增益(-cxy),求出成为前后g指令(加减速指令)的目标前后加速度(gx_gvc)。目标前后加速度(gx_gvc)例如由下述的式1表示。
38.[式1]
[0039][0040]
作为目标前后加速度的前后g指令从gvc控制部24向姿态推断部28输出。另外,前后g指令从gvc控制部24向目标液压计算部26或者目标驱动力计算部27输出。在该情况下,例如若前后g指令是作为负值(负的目标前后加速度)的减速指令,则该减速指令从gvc控制部24向目标液压计算部26输出。如果前后g指令是作为正值(正的目标前后加速度)的加速指令,则该加速指令从gvc控制部24向目标驱动力计算部27输出。
[0041]
目标液压计算部26基于从gvc控制部24输出的前后g指令(减速指令)计算应作为目标的液压值(目标液压值),向制动液压控制装置15输出。即,目标液压计算部26根据前后g指令(目标前后加速度)计算目标的液压,利用制动液压控制装置15产生液压。制动液压控制装置15产生与由目标液压计算部26计算出的目标液压值对应的液压。另一方面,目标驱动力计算部27基于从gvc控制部24输出的前后g指令(加速指令)计算应作为目标的驱动力(目标驱动力),并向驱动装置16输出。即,目标驱动力计算部27根据前后g指令(目标前后加速度)计算目标的驱动力,利用驱动装置16产生驱动力。驱动装置16产生与由目标驱动力计算部27计算出的目标驱动力对应的驱动力。gvc控制部24、目标液压计算部26以及目标驱动力计算部27对应向制动液压控制装置15输出的目标液压以及应向驱动装置16输出的驱动力进行计算,实现横向加速度与前后加速度相关联的gv控制。
[0042]
用于进行力矩控制(moment 控制)的m 控制部25根据车辆的横向加速度控制车辆的横摆力矩。即,m 控制部25基于由微分部23计算出的横向加速度,计算成为车辆应产生的横摆力矩的指令的力矩指令m 。在该情况下,如图3所示,在力矩控制中,在打入横向加速度(gy)增加的方向盘时,使左右轮2、3产生不同的制动力(例如仅使单轮2、3产生制动力),从而产生车辆转弯方向的横摆力矩m (正的横摆力矩)。即,在打入方向盘时,根据横向加速度,与转弯外侧的车轮相比,使对于转弯内侧的车轮的制动力增加(仅使左侧的车轮2、3产生制动力)。另外,在力矩控制中,在打回横向加速度(gy)减少的方向盘时,使左右轮2、3产生不同的制动力(例如仅使单轮2、3产生制动力),从而产生与车辆转弯方向相反方向的横摆力矩m (负的横摆力矩)。即,在打回方向盘时,根据横向加速度,与转弯内侧的车轮相比,使对于转弯外侧的车轮的制动力增加(仅使右侧的车轮2、3产生制动力)。
[0043]
m 控制部25例如包含滤波器部以及增益乘法部而构成。m 控制部25由滤波器部对横向加速度进行lpf处理,由增益乘法部乘以增益,由此作为力矩指令m 。即,在m 控制部25的滤波器部中,对由微分部23计算出的横向加速度进行使用了低通滤波器“lpf”的滤波处理。在m 控制部25的增益乘法部中,通过对滤波处理后的横向加速度乘以增益(cm),求出力矩指令(m )。力矩指令(m )由下述的式2表示。
[0044]
[式2]
[0045][0046]
力矩指令从m 控制部25向姿态推断部28输出。另外,力矩指令从m 控制部25向目标液压计算部26输出。目标液压计算部26基于从m 控制部25输出的力矩指令计算应作为目标的液压值(目标液压值),并向制动液压控制装置15输出。即,目标液压计算部26根据计算出的力矩指令计算目标的液压,利用制动液压控制装置15产生液压。制动液压控制装置15产生与由目标液压计算部26计算出的目标液压值对应的液压。m 控制部25以及目标液压计算部26通过对应向制动液压控制装置15输出的目标液压进行计算,实现横向加速度与横摆力矩相关联的力矩控制。在实施方式中,目标液压计算部26基于来自gvc控制部24的前后g指令与来自m 控制部25的力矩指令,计算应作为目标的液压值(目标液压值),并向制动液压控制装置15输出。
[0047]
姿态推断部28被输入从gvc控制部24输出的前后g指令与从m 控制部25输出的力矩指令。姿态推断部28使用力矩指令(横摆力矩指令值),推断在车辆产生的俯仰
·
侧倾量。在实施方式中,姿态推断部28使用“前后g指令”与“力矩指令”这两方推断在车辆中产生的俯仰
·
侧倾量。即,姿态推断部28基于“从gvc控制部24输出的前后g指令”与“从m 控制部25输出的力矩指令”推断车辆的姿态。在该情况下,姿态推断部28作为车辆的姿态(在车辆产生的俯仰
·
侧倾量),推断俯仰率与侧倾率。
[0048]
具体而言,姿态推断部28根据前后加速度、即“作为gvc控制部24的前后g指令的前后加速度”与“根据m 控制部25的力矩指令推断的前后加速度”,推断在车身1产生的俯仰率。由此,不仅使用前后g指令,也使用横摆力矩指令值,推断相当于在车辆产生的俯仰量(俯仰状态)的俯仰率。在该情况下,俯仰率例如如以下那样推断。即,通过对于前后加速度乘以俯仰角/前后加速度增益,进而进行使动态特性近似的lpf处理来再现动力学,从而根
据前后加速度计算俯仰角。然后,通过对该计算出的俯仰角进行微分,计算(推断)俯仰率。
[0049]
另外,姿态推断部28根据横摆力矩指令值、即m 控制部25的力矩指令,也对在车身1产生的侧倾率进行推断。由此,使用横摆力矩指令值,推断相当于在车辆产生的侧倾量(辊状态)的侧倾率。在该情况下,侧倾率例如根据由力矩指令推断的侧倾力矩计算侧倾角,并对该侧倾角进行微分来计算。另外,根据需要进行lpf处理。由姿态推断部28计算出的俯仰率(推断俯仰率)向俯仰控制部29输出。由姿态推断部28计算出的侧倾率(推断侧倾率)向侧倾抑制部30输出。
[0050]
俯仰控制部29被输入从横向加速度
·
偏航率推断部22输出的横向加速度(推断横向加速度)、从姿态推断部28输出的俯仰率(推断俯仰率)、及从极限区域判定部31输出的俯仰控制用权重系数。俯仰控制部29构成了根据车身的转弯状态计算(取得)成为目标的目标俯仰量(具体而言,俯仰率)的目标俯仰量计算单元(目标俯仰状态计算单元)。俯仰控制部29被输入由姿态推断部28计算出的俯仰率(推断俯仰率),从而即使在进行gv控制以及力矩控制的车辆中,也调整衰减力可变阻尼器6、9的力,以使基于俯仰控制部29的俯仰量(目标俯仰率)接近目标值。为此,俯仰控制部29根据横向加速度推断侧倾角,将该推断出的侧倾角的绝对值乘以增益并进行微分,从而计算目标俯仰率。然后,俯仰控制部29计算根据横向加速度计算出的目标俯仰率与由姿态推断部28推断的俯仰率(预测俯仰率)的差分,根据计算出的差俯仰率,通过ff控制,在考虑俯仰方向的动力学的基础上,计算各轮的目标衰减力,以达到目标俯仰率。由此,控制器21能够推断在车辆产生的俯仰量,并将该推断出的俯仰量接近目标俯仰量的指令值输出到衰减力可变阻尼器6、9。而且,俯仰控制部29通过对计算出的目标衰减力乘以从极限区域判定部31输出的俯仰控制用权重系数,进行针对目标衰减力的加权,将乘以权重系数后的目标衰减力向加法部33输出。
[0051]
这里,俯仰控制部29在由gvc控制部24的前后加速度(前后g指令)产生的预测俯仰率比目标俯仰率大的情况下,目标是减小俯仰。因此,计算目标俯仰率与预测俯仰率的绝对值之差,在该值为正的情况下,由于目标俯仰率较大,因此利用产生考虑了俯仰动力学的俯仰的控制项来产生俯仰。相反,计算目标俯仰率与预测俯仰率的绝对值之差,在该值为负的情况下,由于预测俯仰率较大,因此利用抑制俯仰的控制项来抑制俯仰。
[0052]
侧倾抑制部30被输入从微分部23输出的横向加速度、从姿态推断部28输出的侧倾率(推断侧倾率)、及从极限区域判定部31输出的侧倾抑制用权重系数。侧倾抑制部30构成了根据车身的转弯状态计算(取得)成为目标的目标侧倾量(具体而言,侧倾率)的目标侧倾量计算单元(目标辊状态计算单元)。侧倾抑制部30被输入由姿态推断部28计算出的侧倾率(推断侧倾率),从而即使在进行gv控制以及力矩控制的车辆中,也调整衰减力可变阻尼器6、9的力,以使基于侧倾抑制部30的侧倾量(目标侧倾率)接近目标值。为此,侧倾抑制部30基于由微分部23计算出的横向加速度计算侧倾率,对于计算出的侧倾率乘以增益,从而计算目标衰减力以抑制侧倾。
[0053]
即,在侧倾抑制部30中,为了进行侧倾抑制控制,计算成为各轮侧的衰减力可变阻尼器6、9中应产生的力(衰减力)的目标衰减力。在该情况下,侧倾抑制部30以根据横向加速度抑制侧倾的方式计算目标衰减力。此时,侧倾抑制部30例如计算根据横向加速度计算出的目标侧倾率与由姿态推断部28推断的侧倾率(预测侧倾率)的差分,根据计算出的差侧倾率计算各轮的目标衰减力以达到目标侧倾率。由此,控制器21能够基于横向加速度与横摆
力矩指令值推断在车辆产生的侧倾量,并将该推断出的侧倾量接近目标侧倾量的指令值向衰减力可变阻尼器6、9输出。而且,侧倾抑制部30通过对计算出的目标衰减力乘以从极限区域判定部31输出的侧倾抑制用权重系数来进行针对目标衰减力的加权,将乘以权重系数后的目标衰减力向加法部33输出。
[0054]
这里,关于侧倾,力矩控制对车辆的影响在打入时与打回时不同。因此,根据作为力矩控制的指令值的力矩指令,在打入时增加侧倾控制指令(目标衰减力),在打回时减少侧倾控制指令(目标衰减力),从而能够确保与转向相应的连贯的侧倾动作。即,侧倾抑制部30使用由姿态推断部28根据m 控制部25的力矩指令推断的侧倾率(预测侧倾率),进行与力矩指令相应的侧倾抑制控制。在该情况下,侧倾抑制部30在转向的打入时增加侧倾控制指令(目标衰减力),在转向的打回时减少侧倾控制指令(目标衰减力)。
[0055]
极限区域判定部31被输入由偏航率传感器11检测出的偏航率(实际偏航率)与由横向加速度
·
偏航率推断部22计算出的推断偏航率。极限区域判定部31判定车辆行驶时的轮胎的接地力(抓地力)是否达到常用区域(线性区域)起的极限区域(非线性区域),输出与该判定结果相应的权重系数、即用于调整车辆的姿态的控制量(目标衰减力)的权重系数。在该情况下,极限区域判定部31根据差偏航率调整侧倾抑制与俯仰控制的控制量。即,极限区域判定部31运算成为由横向加速度
·
偏航率推断部22推断并且从该横向加速度
·
偏航率推断部22输出的偏航率(推断偏航率)与由偏航率传感器11检测出的实际偏航率之差的差偏航率。
[0056]
极限区域判定部31基于差偏航率计算用于调整侧倾抑制的控制量的侧倾抑制用权重系数与用于调整俯仰控制的控制量的俯仰控制用权重系数。极限区域判定部31将侧倾抑制用权重系数向侧倾抑制部输出,将俯仰控制用权重系数向俯仰控制部输出。由此,控制器21基于作为车辆的偏航率的推断值与检测值之差的差偏航率调整衰减力可变阻尼器6、9的力。即,控制器21基于作为车辆的偏航率的推断值与检测值之差的差偏航率,向成为力产生装置的衰减力可变阻尼器6、9输出指令值。在该情况下,极限区域判定部31例如在差偏航率变大时判断为车辆行驶时的轮胎处于接近极限区域的状态,在这种情况下,为了对侧倾抑制部30侧的控制赋予权重,增大侧倾抑制用权重系数,相对地减小俯仰控制部29侧的控制,因此将俯仰控制用权重系数减小为“0”或者接近“0”。
[0057]
相对速度推断部32被从微分部23输入横向加速度。相对速度推断部32基于由微分部23计算出的横向加速度将各轮的衰减力可变阻尼器6、9中的上、下方向的伸缩速度(行程速度)推断(计算)为相对速度。即,在相对速度推断部32中,根据由横向加速度计算出的侧倾率与车辆规格,利用几何学关系推断各轮的相对速度。由相对速度推断部32推断的相对速度被输入到衰减力映射部34。
[0058]
加法部33被输入从侧倾抑制部30输出的目标衰减力与从俯仰控制部29输出的目标衰减力。加法部33将由侧倾抑制部30计算出的相当于侧倾抑制控制量的衰减力与由俯仰控制部29计算出的相当于俯仰控制量的衰减力相加,将其作为各轮的目标衰减力向衰减力映射部34输出。
[0059]
衰减力映射部34被输入从相对速度推断部32输出的相对速度与从加法部33输出的目标衰减力。衰减力映射部34根据目标衰减力与推断的相对速度,由预先存储的衰减力特性的映射(衰减力、指令电流值及相对速度的关系)计算指令电流值。衰减力映射部34将
计算出的指令电流值向未图示的电流驱动器输出,经由电流驱动器将指令电流值所对应的电流向衰减力可变阻尼器6、9供给。由此,可变地调整衰减力可变阻尼器6、9的衰减力。
[0060]
如此,在第一实施方式中,控制器21的姿态推断部28使用“基于车辆的横向加速度的变化率(横向加速度)使车辆产生横摆力矩的横摆力矩指令值(力矩指令)”以及/或者“基于车辆的横向加速度的变化率(横向加速度)使车辆产生加减速的加减速指令值(前后g指令)”,推断(计算)在车辆产生的俯仰
·
侧倾量(预测俯仰率、预测侧倾率)。然后,在控制器21的俯仰控制部29以及侧倾抑制部30中,使用由姿态推断部28推断的俯仰
·
侧倾量(预测俯仰率、预测侧倾率),调整衰减力可变阻尼器6、9的衰减力,以使基于俯仰控制部29的俯仰量与基于侧倾抑制部30的侧倾量接近目标值。在该情况下,控制器21根据横摆力矩指令,在转向的打入时增加侧倾控制指令(目标衰减力),在转向的打回时减少侧倾控制指令(目标衰减力)。另外,也可以以仅使力矩控制对车辆的影响较大的侧倾量接近目标值的方式调整衰减力可变阻尼器6、9的衰减力。换言之,也可以推断在车辆产生的侧倾量,使作为目标侧倾量计算单元的侧倾抑制部30的侧倾量接近目标值。即,也可以不将俯仰控制部29的指令值向衰减力映射部34输入。
[0061]
如此,在第一实施方式中,控制器21根据车身的转弯状态计算成为目标的目标侧倾量。然后,控制器21基于车辆的横向加速度的变化率与产生横摆力矩的横摆力矩指令值,推断在车辆产生的侧倾量,将该推断的侧倾量接近目标侧倾量的指令值向成为力产生装置的衰减力可变阻尼器6、9输出。而且,控制器21根据车身的转弯状态计算成为目标的目标俯仰量。然后,控制器21推断在车辆产生的俯仰量,将该推断的俯仰量接近目标俯仰量的指令值向成为力产生装置的衰减力可变阻尼器6、9输出。在该情况下,控制器21基于车辆的横向加速度的变化率,使用产生加减速的加减速指令值与横摆力矩指令值,推断在车辆产生的俯仰
·
侧倾量,将该推断的俯仰
·
侧倾量接近目标俯仰量与目标侧倾量的指令值向成为力产生装置的衰减力可变阻尼器6、9输出。
[0062]
第一实施方式的车辆运动控制装置具有如上所述的构成,接下来,对由控制器21进行的车身1的姿态控制处理进行说明。
[0063]
首先,微分部23对由横向加速度
·
偏航率推断部22通过车辆模型与用于考虑车辆动力学的lpf(低通滤波器)计算出的推断横向加速度进行微分,计算横向加速度。gvc控制部24对横向加速度进行lpf处理,乘以增益,从而计算作为前后g指令的目标前后加速度。目标液压计算部26根据由gvc控制部24计算出的前后g指令(目标前后加速度)计算目标的液压,通过制动液压控制装置15使各车轮侧的轮缸(盘式制动器)产生液压。另外,目标驱动力计算部27根据由gvc控制部24计算出的前后g指令(目标前后加速度)计算目标的驱动力,通过驱动装置16对各车轮(左、右的前轮2、2)赋予驱动力。通过如此控制,能够实现横向加速度与前后加速度相关联的gv控制。另一方面,m 控制部25对横向加速度进行lpf处理,乘以增益,从而计算力矩指令(横摆力矩指令)。目标液压计算部26根据由m 控制部25计算出的力矩指令计算目标的液压,通过制动液压控制装置15使各车轮侧的轮缸(盘式制动器)产生液压。通过如此控制,能够实现横向加速度与横摆力矩相关联的力矩控制(m 控制、横摆力矩控制)。
[0064]
接下来,对侧倾抑制控制以及俯仰控制进行说明。在侧倾抑制部30中,以根据横向加速度抑制侧倾的方式计算目标衰减力。在俯仰控制部29中,以根据横向加速度提高侧倾
感的方式计算目标衰减力。这里,在俯仰控制部29中,对根据横向加速度推断的侧倾角的绝对值乘以增益来计算目标俯仰率。在该情况下,为了进行与gv控制以及力矩控制对应的俯仰控制,在姿态推断部28中,推断由“gv控制的前后g指令”与“根据力矩控制的力矩指令产生的前后加速度”产生的俯仰率。另外,在姿态推断部28中,还推定根据力矩控制的力矩指令产生的侧倾率。
[0065]
在俯仰控制部29中,计算由姿态推断部28推断的俯仰率(预测俯仰率)与目标俯仰率的差分,根据计算出的差俯仰率,通过ff控制,在考虑了俯仰方向的动力学的基础上,计算各轮的目标衰减力以成为目标俯仰率。这里,在由gv控制以及力矩控制的前后加速度产生的俯仰率比目标俯仰率大的情况下,以减小俯仰为目标。因此,计算目标俯仰率与预测俯仰率的绝对值之差,在该值为正的情况下,由于目标俯仰率较大,因此利用产生考虑了俯仰动力学的俯仰的控制项而产生俯仰。相反,计算目标俯仰率与预测俯仰率的绝对值之差,在该值为负的情况下,由于预测俯仰率较大,因此利用抑制俯仰的控制项来抑制俯仰。
[0066]
另一方面,在侧倾抑制部30中,计算根据横向加速度计算出的目标侧倾率与由姿态推断部28推断的侧倾率(预测侧倾率)的差分,根据计算出的差侧倾率计算各轮的目标衰减力,以成为目标侧倾率。这里,关于侧倾,由于力矩控制对车辆的影响在打入时与打回时不同,因此在打入时,根据力矩控制指令值(力矩指令)增加侧倾控制指令(目标衰减力),在打回时减少侧倾控制指令(目标衰减力)。由此,在转向时能够成为连贯的侧倾动作。
[0067]
另外,在极限区域判定部31中,运算成为由横向加速度
·
偏航率推断部22计算出的偏航率(推断偏航率)与由偏航率传感器11检测出的实际偏航率之差的差偏航率。极限区域判定部31根据差偏航率调整侧倾抑制与俯仰控制的控制量。具体而言,计算基于差偏航率调整侧倾抑制的控制量用的侧倾抑制用权重系数与调整俯仰控制的控制量用的俯仰控制用权重系数。极限区域判定部31将侧倾抑制用权重系数向侧倾抑制部30输出,将俯仰控制用权重系数向俯仰控制部29输出。在侧倾抑制部30中,对目标衰减力乘以侧倾抑制用权重系数,在俯仰控制部29中,对目标衰减力乘以俯仰抑制用权重系数。由此,能够进行与车辆行驶时的轮胎的接地力(抓地力)相应的目标衰减力的调整。
[0068]
而且,在相对速度推断部32中,根据由微分部23计算出的横向加速度计算侧倾率,并且根据计算出的侧倾率与车辆规格,利用几何学关系,推断各轮的相对速度。另一方面,在加法部33中,如上述那样将由侧倾抑制部30计算出的目标衰减力(侧倾抑制控制量)与由俯仰控制部29计算出的目标衰减力(俯仰控制量)相加,将其作为各轮的目标衰减力。作为衰减力映射部34中,根据该各轮的目标衰减力与由相对速度推断部32推断的相对速度,使用预先存储于控制器21的衰减力特性(衰减力―指令电流值―相对速度)计算指令电流值。控制器21使电流驱动器产生计算出的电流值,使衰减力可变阻尼器6、9的衰减力可变。
[0069]
图3示出了横向加速度(gy)、加减速指令(gx_gvc)、力矩指令(m )、侧倾角、俯仰角及悬架控制指令(对于衰减力可变阻尼器6、9的衰减力指令)的时间变化的一个例子。在图3中,实线41表示横向加速度gy的变化,实线42表示加减速指令(前后g指令)gx_gvc的变化,实线43表示力矩指令m 的变化。另外,在图3中,虚线44、45、46表示专利文献2所记载的技术那样的在进行gv控制的车辆中考虑gv控制引起的姿态变化来调整衰减力可变阻尼器6、9的衰减力的情况下的侧倾角的变化、俯仰角的变化、悬架控制指令(衰减力)的变化。在图3中,双点划线47、48、49表示在进行gv控制以及力矩控制的车辆中考虑gv控制引起的姿
态变化来调整衰减力可变阻尼器6、9的衰减力的情况下的侧倾角的变化、俯仰角的变化、悬架控制指令(衰减力)的变化。在图3中,实线50、51、52表示在进行gv控制以及力矩控制的车辆中考虑gv控制以及力矩控制引起的姿态变化来调整衰减力可变阻尼器6、9的衰减力的情况,即本实施方式的侧倾角的变化、俯仰角的变化、悬架控制指令(衰减力)的变化。
[0070]
这里,在不考虑力矩控制引起的姿态变化的情况下,根据表示侧倾角的变化的双点划线48可知,由于通过力矩控制对单轮赋予制动而产生的侧倾力矩,侧倾被助长
·
抑制。即,在转向的打入时,侧倾被助长,在转向的打回时,侧倾被抑制。与此相对,在比较图3中的悬架控制指令(衰减力)的实线52与双点划线49时可知,在考虑了力矩控制引起的姿态变化的本实施方式中,在转向的打入时,悬架控制指令(衰减力)增加,在转向的打回时,悬架控制指令(衰减力)减少。由此,在比较图3中的俯仰角的实线51与双点划线48时可知,在本实施方式中,在转向的打入时以及转向的打回时,能够抑制俯仰角的变化。
[0071]
另外,在比较图3中的侧倾角的实线50与双点划线48时可知,在本实施方式中,在转向的打入时能够减少侧倾助长的情况,在转向的打回时能够减少侧倾被抑制的情况。即,在实施方式中,通过考虑由gv控制以及力矩控制产生的俯仰以及由力矩控制产生的侧倾来控制衰减力可变阻尼器6、9,能够提高车辆的操纵稳定性。在该情况下,能够抑制转向返回时(车道变换、结束转弯时)产生的俯仰
·
侧倾、特别是侧倾。即,在结束转弯时,通过加速器操作,能够产生俯仰而调整俯仰,但不能产生侧倾来调整。与此相对,在实施方式中,通过考虑力矩控制引起的姿态变化来调整衰减力可变阻尼器6、9的衰减力,能够调整侧倾。
[0072]
如以上那样,根据第一实施方式,控制器21根据横摆力矩指令值(力矩指令)与加减速指令值(前后g指令)推断在车辆产生的俯仰
·
侧倾量(俯仰率、侧倾率),调整衰减力可变阻尼器6、9的力(衰减力),以使基于俯仰控制部29的俯仰量与基于侧倾抑制部30的侧倾量接近目标值。因此,衰减力可变阻尼器6、9的力(衰减力)被调整为考虑了“基于力矩指令产生的横摆力矩所引起的俯仰
·
侧倾量的变化”与“基于力矩指令以及前后g指令产生的俯仰力矩所引起的俯仰
·
侧倾量的变化”的力。
[0073]
由此,能够减少因基于力矩指令产生的横摆力矩而助长或者抑制侧倾的情况。另外,能够减少因基于力矩指令与前后g指令产生的俯仰力矩而助长或者抑制俯仰的情况。即,能够消除因基于力矩指令产生的横摆力矩所引起的侧倾变化的助长或者抑制,能够维持侧倾
·
俯仰关联。另外,能够消除因基于力矩指令与前后g指令产生的俯仰力矩所引起的俯仰的助长或者抑制,从这方面来看,也能够维持侧倾
·
俯仰关联。由此,能够抑制不必要的车辆的姿态变化,能够改善横摆运动的响应性、收敛性。其结果,在当车辆转向时基于力矩指令以及前后g指令由制动液压控制装置15以及驱动装置16产生制动驱动力的车辆中,能够实现连贯的车辆运动,能够提高操纵稳定性。
[0074]
根据第一实施方式,基于作为车辆的偏航率的推断值与检测值之差的差偏航率,调整衰减力可变阻尼器6、9的力(衰减力)。因此,能够根据差偏航率推断车辆行驶时的轮胎的接地力(抓地力)是常用区域还是极限区域,并根据该区域调整衰减力可变阻尼器6、9的力(衰减力)。即,能够考虑轮胎的接地力的状况来调整衰减力可变阻尼器6、9的衰减力,从该方面也能够提高操纵稳定性。
[0075]
根据第一实施方式,控制器21根据力矩指令,在转向的打入时增加侧倾控制指令(图3的悬架控制指令),在转向的打回时减少侧倾控制指令(图3的悬架控制指令)。因此,在
转向的打入时能够减少侧倾被助长的情况,在转向的打回时能够减少侧倾被抑制的情况。
[0076]
接下来,图4示出了第二实施方式。第二实施方式的特征在于,进行车身的姿态控制的促动器(力产生机构)不是半主动悬架(例如衰减力调整式的液压缓冲器),而是使用能够自身产生推力的主动悬架(例如电磁悬架)的构成。更具体而言,第二实施方式构成为,通过ff控制(前馈控制)抵消根据gv控制与力矩控制的控制指令在车身产生的力,通过ff控制以及fb控制(反馈控制)控制电磁悬架(电动促动器)以实现目标姿态。另外,在第二实施方式中,对与第一实施方式相同的构成要素标注相同的附图标记并省略其说明。
[0077]
在第二实施方式中,在车辆的车身1与多个车轮2、3之间分别夹装设置有多个电磁悬架61。电磁悬架61例如包含电动线性促动器等电动促动器(电磁阻尼器)而构成。电磁悬架61构成了能够调整车身1与各车轮2之间的力的力产生装置。电磁悬架61与后述的控制器63一同构成了车辆所使用的悬架控制装置。
[0078]
另外,在第二实施方式中,具备车高传感器62。车高传感器62设于车身1。车高传感器62例如在左、右的前轮2侧与左、右的后轮3侧分别单独地检测车高,将其检测信号向控制器63输出。控制器63的输入侧连接于车高传感器62、转向角传感器12以及车速传感器13,输出侧连接于电磁悬架61的促动器(电动线性促动器)、制动液压控制装置15。控制器63具备横向加速度推断部22a、gvc控制部64、m 控制部65、目标液压计算部26、ff控制部66、目标姿态计算部67、姿态计算部68、差运算部69、ff控制部70、fb控制部71、加法部72。另外,相对于在第一实施方式中具备推断横向加速度以及偏航率的横向加速度
·
偏航率推断部22,在第二实施方式中,具备推断横向加速度的横向加速度推断部22a。
[0079]
控制器63的横向加速度推断部22a将推断出的横向加速度向目标姿态计算部67、gvc控制部64、m 控制部65输出。gvc控制部64通过对由横向加速度推断部22a推断的横向加速度进行微分,计算横向加速度(跃度),基于计算出的横向加速度计算应在车辆的左右轮2、3产生的驱动力或者制动力的指令即前后g指令。即,第二实施方式的gvc控制部64由第一实施方式的微分部23与gvc控制部24(都参照图2)构成。m 控制部65通过对由横向加速度推断部22a推断的横向加速度进行微分,计算横向加速度(跃度),基于计算出的横向加速度计算成为应在车辆产生的横摆力矩的指令的力矩指令。即,第二实施方式的m 控制部65由第一实施方式的微分部23与m 控制部25(都参照图2)构成。
[0080]
由gvc控制部64计算出的前后g指令以及由m 控制部65计算出的力矩指令向目标液压计算部26输出。目标液压计算部26与第一实施方式的目标液压计算部26相同,基于来自gvc控制部64的前后g指令与来自m 控制部65的力矩指令,计算应作为目标的液压值(目标液压值)即各轮的制动指令值,并向制动液压控制装置15以及ff控制部66输出。
[0081]
ff控制部66被从目标液压计算部26输入各轮的制动指令值。ff控制部66计算(推断)由基于力矩指令以及/或者前后g指令的各轮的制动指令值产生的侧倾力矩以及俯仰力矩(预测侧倾力矩以及预测俯仰力矩)。然后,ff控制部66将消除该侧倾力矩以及俯仰力矩的指令值(指令侧倾力矩以及指令俯仰力矩)向加法部72输出。如此,ff控制部66使用来自目标液压计算部26的各轮的制动指令值,推断(计算)在车辆产生的俯仰
·
侧倾量(预测俯仰力矩、预测侧倾力矩)。
[0082]
目标姿态计算部67、姿态计算部68、差运算部69、ff控制部70、fb控制部71以及加法部72相当于目标俯仰量计算单元以及目标侧倾量计算单元。目标姿态计算部67被输入由
横向加速度推断部22a推断的车身1的横向加速度(推断横向加速度)。目标姿态计算部67根据推断横向加速度计算目标侧倾率以及目标俯仰率。目标姿态计算部67将目标侧倾率以及目标俯仰率向差运算部69以及ff控制部70输出。姿态计算部68被输入由车高传感器62检测出的车高。姿态计算部68根据由车高传感器62检测出的车高(实车高)计算实际侧倾率以及实际俯仰率。姿态计算部68将实际侧倾率以及实际俯仰率向差运算部69输出。
[0083]
在差运算部69中,计算由目标姿态计算部67计算出的目标侧倾率以及目标俯仰率与由姿态计算部68计算出的实际侧倾率以及实际俯仰率之差,将该差(相对于目标值的差)向fb控制部71输出。ff控制部70若被从目标姿态计算部67输入目标侧倾率以及目标俯仰率,则计算基于前馈控制的目标侧倾力矩以及目标俯仰力矩,并向加法部72输出。fb控制部71根据由差运算部69计算出的相对于目标值的差,计算基于反馈控制的目标侧倾力矩以及目标俯仰力矩,并向加法部72输出。
[0084]
加法部72将来自ff控制部70的目标侧倾力矩以及目标俯仰力矩、来自fb控制部71的目标侧倾力矩以及目标俯仰力矩、及用于消除由来自ff控制部66的gv控制以及力矩控制产生的侧倾力矩以及俯仰力矩的指令值(指令侧倾力矩、指令俯仰力矩)相加。由此,加法部72计算最终的目标侧倾力矩以及目标俯仰力矩,并向电磁悬架61(的促动器)输出。在该情况下,在加法部72中,以能够在各车轮侧的电磁悬架61产生分配给各车轮侧的目标俯仰力矩与目标侧倾力矩所对应的目标推力fr、fl、rr、rl的方式计算控制量,将与计算出的控制量(目标推力fr、fl、rr、rl)对应的控制信号分别输出到各电磁悬架61。
[0085]
如此,在第二实施方式中,控制器63的加法部72使用从由ff控制部66推断的俯仰
·
侧倾量(预测俯仰力矩、预测侧倾力矩)获得的指令值(指令侧倾力矩、指令俯仰力矩),调整电磁悬架61的控制力,以使基于目标姿态计算部67、姿态计算部68、差运算部69、ff控制部70以及fb控制部71的俯仰量(俯仰力矩)与侧倾量(侧倾力矩)接近目标值。即,控制器63基于车辆的横向加速度的变化率,使用产生加减速的加减速指令值与横摆力矩指令值,推断在车辆产生的俯仰
·
侧倾量,将该推断的俯仰
·
侧倾量接近目标俯仰量与目标侧倾量的指令值向成为力产生装置的衰减力可变阻尼器6、9输出。
[0086]
第二实施方式如上述那样通过控制器63调整电磁悬架61的力(控制力),其基本作用与上述的第一实施方式无明显差异。根据第二实施方式,控制器63通过ff控制部66计算由基于gv控制以及力矩控制的各轮的制动指令值产生的侧倾力矩、俯仰力矩,并将消除该侧倾力矩、俯仰力矩的指令值向加法部72输出。由此,能够抑制由gv控制与力矩控制产生的侧倾
·
俯仰动作,能够高精度地实现目标姿态。
[0087]
另外,在第一实施方式中,列举构成为由一个控制器21进行制动液压控制装置15以及驱动装置16的控制与衰减力可变阻尼器6、9的控制的情况为例进行了说明。即,在第一实施方式中,控制器21构成了在车辆的转向时产生制动驱动力的制动驱动力控制单元(制动驱动力控制器)的一部分,并且构成了调整力产生装置(衰减力可变阻尼器6、9)的力的力调整单元(控制部)。但是,并不限定于此,例如也可以构成为,分别设置控制制动液压控制装置15以及驱动装置16的控制器(制动驱动力控制器)与控制衰减力可变阻尼器6、9的控制器(控制部),将这些控制器通过通信线(信号线)连接。这对于第二实施方式也相同。
[0088]
在第一实施方式中,列举作为使车辆产生制动驱动力的控制能够进行gv控制与力矩控制(车辆横摆力矩控制、m 控制)这两方的车辆的情况为例进行了说明。但是,并不限定
于此,例如也可以是不进行gv控制而是进行力矩控制的车辆。另外,在第一实施方式中,列举作为gv控制能够产生制动力与驱动力这两方的车辆的情况为例说明。但是,并不限定于此,例如也可以是进行不产生驱动力而是产生制动力的gv控制的车辆、或者进行不产生制动力而是产生驱动力的gv控制的车辆。而且,在第一实施方式中,列举作为力矩控制产生制动力的车辆的情况为例进行了说明。但是,并不限定于此,例如也可以是进行不产生制动力而是产生驱动力的力矩控制的车辆、或者作为力矩控制能够产生制动力与驱动力这两方的车辆。这些对于第二实施方式也相同。
[0089]
在各实施方式中,列举根据转向角与车速使用车辆模型推断横向加速度的情况为例说明。但是,并不限定于此,例如也可以使用传感器检测横向加速度,横向加速度的计算方法没有限定。即,横向加速度的变化率也可以根据转向角的变化率、偏航率的微分值、曲率的微分值、导航数据等求出。另外,关于相对速度的推断,列举根据横向加速度(推断横向加速度)推断的情况为例进行了说明,但也可以通过对车高传感器值进行微分而求出的方法、对弹簧上加速度传感器值与弹簧下加速度传感器之差进行积分等而求出。而且,各实施方式是例示,当然可以对不同的实施方式中所示的构成的部分进行置换或者组合。
[0090]
作为基于以上说明的实施方式的车辆运动控制装置,例如可考虑下述方式。
[0091]
作为第一方式,为一种车辆运动控制装置,其用于具有制动驱动力控制器与多个力产生装置的车辆,所述制动驱动力控制器在车辆转向时调整制动驱动力,所述多个力产生装置分别夹装设置在所述车辆的车身与多个车轮之间,能够调整所述车身与所述各车轮之间的力,所述车辆运动控制装置具有调整所述各力产生装置的力的控制部,所述控制部根据所述车身的转弯状态计算成为目标的目标侧倾量,所述控制部基于所述车辆的横向加速度的变化率与产生横摆力矩的横摆力矩指令值,推断在所述车辆产生的侧倾量,并向所述力产生装置输出使该推断出的侧倾量接近所述目标侧倾量的指令值。根据该第一方式,控制部考虑横摆力矩指令值而向力产生装置输出指令值,因此能够减少在控制(产生)横摆力矩的车辆中侧倾姿态的变化被助长或者抑制的情况。
[0092]
作为第二方式,在第一方式中,所述控制部根据所述车身的转弯状态计算成为目标的目标俯仰量,所述控制部推断在所述车辆产生的俯仰量,并向所述力产生装置输出使该推断出的俯仰量接近所述目标俯仰量的指令值。根据该第二方式,也能够使用俯仰量来调整力产生装置的力。
[0093]
作为另一方式,在第二方式中,所述控制部基于所述车辆的横向加速度的变化率,使用产生横摆力矩的横摆力矩指令值,推断在所述车辆产生的俯仰
·
侧倾量,调整所述力产生装置的力,以使该推断出的俯仰
·
侧倾量接近所述目标俯仰量与所述目标侧倾量。
[0094]
根据该另一方式,控制部根据横摆力矩指令值推断在车辆产生的俯仰
·
侧倾量,调整力产生装置的力,以使该推断出的俯仰
·
侧倾量接近目标俯仰量与目标侧倾量。因此,力产生装置的力被调整为考虑了基于横摆力矩指令值产生的横摆力矩引起的俯仰
·
侧倾量的变化的力。由此,能够减少因基于横摆力矩指令值产生的横摆力矩而助长或者抑制侧倾的情况。即,能够消除基于横摆力矩指令值产生的横摆力矩引起的侧倾的助长或者抑制,能够维持侧倾
·
俯仰关联。而且,能够抑制不必要的姿态变化,也能够改善横摆运动的响应性、收敛性。其结果,在车辆转向时基于横摆力矩指令值利用制动驱动力控制器产生制动驱动力的车辆中,能够成为连贯的车辆运动,能够提高操纵稳定性。
[0095]
作为第三方式,在第二方式中,所述控制部于所述车辆的横向加速度的变化率,使用产生加减速的加减速指令值与所述横摆力矩指令值,推断在所述车辆产生的俯仰
·
侧倾量,并向所述力产生装置输出使该推断出的俯仰
·
侧倾量接近所述目标俯仰量与所述目标侧倾量的指令值。
[0096]
根据该第三方式,控制部能够根据横摆力矩指令值与加减速指令值推断在车辆产生的俯仰
·
侧倾量,调整力产生装置的力,以使该推断出的俯仰
·
侧倾量接近目标俯仰量与目标侧倾量。因此,力产生装置的力被调整为不仅考虑了基于横摆力矩指令值产生的横摆力矩所引起的俯仰
·
侧倾量的变化,还考虑了基于横摆力矩指令值以及加减速指令值产生的俯仰力矩所引起的俯仰
·
侧倾量的变化的力。由此,除了能够减少因基于横摆力矩指令值产生的横摆力矩而助长或者抑制侧倾的情况之外,还能够减少因基于横摆力矩指令值与加减速指令值产生的俯仰力矩而助长或者抑制俯仰的情况。其结果,在车辆转向时基于横摆力矩指令值以及加减速指令值利用制动驱动力控制器产生制动驱动力的车辆中,能够维持侧倾
·
俯仰关联,能够提高操纵稳定性。
[0097]
作为第四方式,在第二方式中,还具备检测所述车辆的偏航率的偏航率传感器,所述控制部基于作为所述车辆的偏航率的推断值与检测值之差的差偏航率而向所述力产生装置输出。根据该第四方式,能够根据差偏航率推断车辆行驶时的轮胎的接地力(抓地力)是常用区域还是极限区域,能够根据该区域调整力产生装置的力。即,能够考虑轮胎的接地力的状况而调整力产生装置的力,该从该方面也能够提高操纵稳定性。
[0098]
作为第五方式,在第二方式中,所述控制部根据所述横摆力矩指令值,在转向的打入时增加侧倾控制指令,在转向的打回时减少侧倾控制指令。根据该第五方式,在转向的打入时能够减少侧倾被助长的情况,在转向的打回时能够减少侧倾被抑制的情况。
[0099]
另外,本发明并不限定于上述的实施方式,而是包含各种变形例。例如上述的实施方式是为了容易理解地说明本发明而详细说明的,并不限定于必须具备所说明的所有构成。另外,可以将某一实施方式的构成的一部分置换为其他实施方式的构成,另外,也可以对某一实施方式的构成加入其他实施方式的构成。另外,可以对于各实施方式的构成的一部分进行其他构成的追加
·
删除
·
置换。
[0100]
本技术主张基于2019年9月27日申请的日本专利申请第2019-177675号的优先权。包含2019年9月27日申请的日本专利申请第2019-177675号的说明书、权利要求书、附图以及摘要在内的全部公开内容通过参照而整体被编入本技术中。
[0101]
附图标记说明
[0102]
2前轮(车轮) 3后轮(车轮) 6、9衰减力可变阻尼器(力产生装置) 11偏航率传感器 15制动液压控制装置(制动驱动力控制单元) 16驱动装置(制动驱动力控制单元) 21、63控制器(制动驱动力控制单元、力调整单元、控制部、制动驱动力控制器) 29俯仰控制部(目标俯仰量计算单元) 30侧倾抑制部(目标侧倾量计算单元) 61电磁悬架(力产生装置)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。