技术特征:
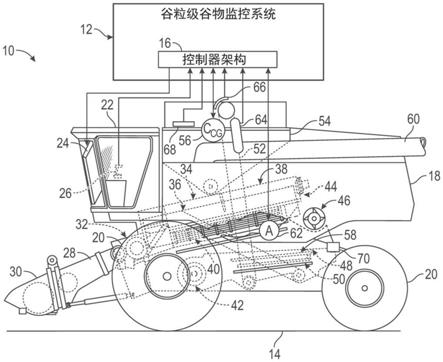
1.一种在联合收割机(10)上使用的谷粒级谷物监控系统(12),所述谷粒级谷物监控系统(12)包括:谷物相机(56),所述谷物相机被定位成捕获被获取到所述联合收割机(10)中并且由所述联合收割机处理的当前收割的谷物的堆积谷物样品图像;水分传感器(64),所述水分传感器被配置成生成指示所述当前收割的谷物的水分水平的水分传感器(64)数据;显示设备(24),所述显示设备具有显示屏,在所述显示屏上选择性地呈现与所述当前收割的谷物相关的参数;以及控制器架构(16),所述控制器架构耦接到所述谷物相机(56)、耦接到所述水分传感器(64)和耦接到所述显示设备(24),所述控制器架构(16)被配置成:分析(90,92)从所述谷物相机(56)接收的所述堆积谷物样品图像,以确定代表所述当前收割的谷物的单个平均谷粒的估计的体积的每谷粒平均(apk)体积;至少部分地基于所确定的apk体积和所述水分传感器(64)数据,重复计算(94)一个或多个顶线收割参数;以及在所述显示设备(24)上选择性地呈现(96)所述顶线收割参数,以供所述联合收割机(10)的操作员查看。2.根据权利要求1所述的谷粒级谷物监控系统(12),其中所述顶线收割参数包括谷粒重量参数。3.根据权利要求2所述的谷粒级谷物监控系统(12),其中所述谷粒重量参数包括测试重量,所述测试重量指定在被填充到预定体积的空间中时所述当前收割的谷物的重量。4.根据权利要求3所述的谷粒级谷物监控系统(12),其中所述控制器架构(16)还被配置为利用指示所述预定体积的空间内的累积空隙空间的谷粒填充数据计算所述测试重量。5.根据权利要求4所述的谷粒级谷物监控系统(12),其中所述控制器架构(16)被配置为至少部分地基于对所述堆积谷物样品图像内的累积空隙空间的图像分析评估来确定所述谷粒填充数据。6.根据权利要求4所述的谷粒级谷物监控系统(12),还包括耦接到所述控制器架构(16)的操作员接口(26);并且其中所述控制器架构(16)被配置成至少部分地基于经由所述操作员接口(26)接收的操作员输入数据来确定所述谷粒填充数据。7.根据权利要求4所述的谷粒级谷物监控系统(12),还包括存储与不同谷物属性相关联的多个谷粒填充数据的数据库(84);并且其中所述控制器架构(16)被配置成通过调用所述多个谷粒填充数据中的对应于所述当前收割的谷物的所选择的一个来确定所述谷粒填充数据。8.根据权利要求1所述的谷粒级谷物监控系统(12),还包括至少一个撞击板传感器(66),所述至少一个撞击板传感器耦接到所述控制器架构(16)并且当所述当前收割的谷物的谷粒被运输到所述联合收割机(10)的粮箱中时被所述当前收割的谷物的谷粒碰撞;其中所述控制器架构(16)耦接到所述撞击板传感器(66)并且被配置成:利用所述当前收割的谷物的apk体积和堆积密度参数来估计所述当前收割的谷物的apk质量;以及
至少部分地基于估计的apk质量和由所述撞击板传感器(66)提供的碰撞数据来监控所述当前收割的谷物的质量流率。9.根据权利要求8所述的谷粒级谷物监控系统(12),其中所述顶线收割参数包括利用所述质量流率作为输入而计算的谷物产量参数。10.根据权利要求1所述的谷粒级谷物监控系统(12),其中所述控制器架构(16)被配置成进一步分析从所述谷物相机(56)接收的所述堆积谷物样品图像,以确定指示所述当前收割的谷物的谷粒尺寸和形状类别的apk形态分类。11.根据权利要求10所述的谷粒级谷物监控系统(12),还包括位于所述联合收割机(10)的粮箱中的称重传感器(68);并且其中所述控制器架构(16)还被配置成:至少部分地基于所述apk形态分类来估计所述当前收割的谷物的休止角(95);以及利用由所述称重传感器(68)生成的数据和所估计的休止角(95)选择性地校准所述水分传感器(64)。12.根据权利要求1所述的谷粒级谷物监控系统(12),还包括撞击板传感器,所述撞击板传感器耦接到所述控制器架构(16)并且当所述当前收割的谷物的谷粒从所述联合收割机(10)喷射时被所述当前收割的谷物的谷粒碰撞;其中所述控制器架构(16)耦接到所述撞击板传感器(70)并且被配置成:利用所述当前收割的谷物的apk体积和堆积密度参数来估计所述当前收割的谷物的apk质量;以及至少部分地基于所估计的apk质量和由所述撞击板传感器(70)提供的撞击数据来监控所述当前收割的谷物的谷物损失参数。13.根据权利要求1所述的谷粒级谷物监控系统(12),还包括在所述联合收割机(10)上并且耦接到所述控制器架构(16)的被致动的收割部件(76);其中所述控制器架构(16)还被配置成:至少部分地基于利用所述apk体积而计算的参数,确定对所述被致动的收割部件(76)的目标设置调节;以及执行以下中的至少一个:(i)在所述显示设备(24)上生成可视地提示操作员实施对所述被致动的收割部件(76)的目标设置调节的图形,或者(ii)自动实施对所述被致动的收割部件(76)的目标设置调节。14.根据权利要求13所述的谷粒级谷物监控系统(12),其中利用所述apk体积而计算的参数包括apk重量、apk质量和apk密度中的至少一个;并且其中所述目标设置调节包括风扇速度调节。15.一种在具有被致动的收割部件(76)的联合收割机(10)上使用的谷粒级谷物监控系统(12),所述谷粒级谷物监控系统(12)包括:谷物相机(56),所述谷物相机被定位成捕获被获取到所述联合收割机(10)中并且由所述联合收割机处理的当前收割的谷物的堆积谷物样品图像;水分传感器(64),所述水分传感器被配置成生成指示所述当前收割的谷物的水分水平的水分传感器(64)数据;显示设备(24),所述显示设备具有显示屏,在所述显示屏上选择性地呈现与所述当前
收割的谷物相关的参数;以及控制器架构(16),所述控制器架构耦接到所述谷物相机(56)、耦接到所述水分传感器(64)和耦接到所述显示设备(24),所述控制器架构(16)被配置成:分析(90,92)从所述谷物相机(56)接收的所述堆积谷物样品图像,以确定每谷粒平均(apk)参数;至少部分地基于所述apk参数来确定(94)对所述被致动的收割部件(76)的目标设置调节;以及执行(96)以下中的至少一个:(i)生成提示操作员实施所述目标设置调节的通知,以及(ii)控制所述被致动的收割部件(76)自动实施所述目标设置调节。
技术总结
谷粒级谷物监控系统的实施例包括:谷物相机,该谷物相机被定位成捕获被获取到联合收割机中并且由联合收割机处理的当前收割的谷物的堆积谷物样品图像;水分传感器;以及显示设备。控制器架构耦接到谷物相机、耦接到水分传感器和耦接到显示设备。控制器架构被配置成:(i)分析从谷物相机接收的堆积谷物样品图像,以确定代表当前收割的谷物的单个平均谷粒的估计的体积的每谷粒平均(APK)体积;(ii)至少部分地基于所确定的APK体积和水分传感器数据,重复计算一个或多个顶线收割参数;以及(iii)在显示设备上选择性地呈现顶线收割参数,以供联合收割机的操作员查看。以供联合收割机的操作员查看。以供联合收割机的操作员查看。
技术研发人员:扎卡里
受保护的技术使用者:迪尔公司
技术研发日:2021.11.02
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。