1.本发明涉及磁约束核聚变装置技术领域,具体涉及一种仿星器,尤其涉及一种防止仿星器三维模块化线圈在使用过程中因受电磁力作用而产生变形的设计方法。
背景技术:
2.随着社会的发展进步,人类对能源的需求越来越大,世界能源危机日益加剧。在现有的能源体系中,主要以传统的煤、石油、天然气等不可再生能源为主,这些能源不仅在使用过程中会对环境产生巨大污染,而且可供使用的年限非常有限。因此,为了维持人类社会高速的可持续发展,必须发展安全且储量丰富的清洁能源。受控核聚变能正是这样一种能源,由于其燃料在海水中储量丰富且聚变反应过程中不产生长周期放射性物质,而被公认为是解决人类能源危机的最佳途径。
3.核聚变反应的发生需要上亿度的高温,如此高的温度使物质被电离而形成高温等离子体。研究表明,采用强磁场可以很好地将高温等离子体中的带电粒子约束在一个磁容器内,这就是磁约束的基本原理。多年来的研究结果表明,受控磁约束聚变是最有可能率先实现聚变能商业化的途径。目前,世界上最有成效的两种受控磁约束聚变装置为托卡马克和仿星器。
4.对于托卡马克,虽然经过半个多世纪的不懈探索,基于托卡马克位形的磁约束聚变研究已经取得了巨大的进展;但是,托卡马克等离子体电流在接近极端条件时可能由于磁流体不稳定性引起等离子体的大破裂,从而导致装置的安全风险。
5.磁约束聚变的另一类装置——仿星器的磁场完全由外置磁场线圈的电流产生。由于仿星器没有等离子体电流,故不会引起大破裂,并能够长时间稳态运行,因此它更适合作为商用聚变堆。美国、日本和德国等国家都拥有仿星器装置,国际上对仿星器的研究也从未间断。仿星器通过外置扭曲的磁场线圈,不需要等离子体电流即可产生约束高温等离子体的螺旋磁场。然而,仿星器的线圈结构和制造工艺比托卡马克复杂得多。与托卡马克相比,早期建造的传统仿星器具有很高的磁场波纹度。从原理上讲,这将引起大的新经典输运损失,导致其约束性能低于托卡马克,这正是传统仿星器未能成为国际主流的磁约束聚变位形的主要原因。鉴于仿星器位形具有无等离子体大破裂的明显优势,人们一直在坚持不懈的对仿星器进行研究,其中,改善和优化传统仿星器的磁场位形以提高其对等离子体的约束性能便成为近年来磁约束核聚变研究的焦点之一。
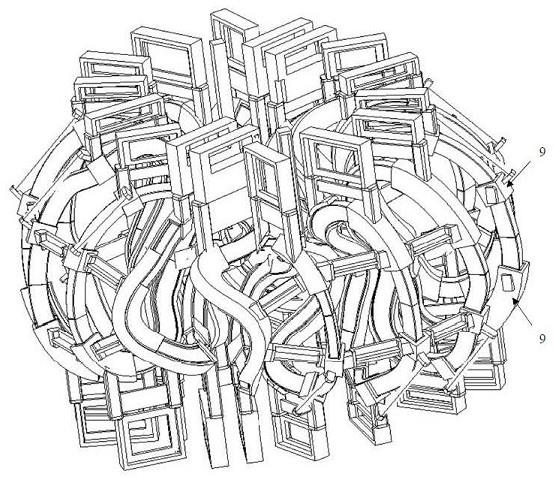
6.通过了解和分析当前国际上现有的磁约束聚变装置的特性,申请人设计了一种将托卡马克与传统仿星器优势相结合的准环对称磁场位形的仿星器,该准环对称仿星器包括线圈系统、真空系统、支撑系统、电源系统、水冷系统、中央控制系统、加热和诊断系统;线圈系统产生用于约束等离子体的磁场位形,该线圈系统包括十六个非平面模块化线圈(由四个极向场线圈和十二个环向场线圈组成),这十六个非平面模块化线圈的分布参见图1所示。
7.这十六个线圈具有:(1)利用非平面模块化线圈系统实现准环对称磁场约束的位
形;(2)通过极向场线圈控制等离子体中心磁轴的位置;(3)通过改变环向场线圈电流实现磁岛偏滤器位形。
8.这十六个线圈要实现上述三项功能,就需要将这十六个非平面模块化线圈的构造形状和摆放位置设计的非常精确,这样才能产生精准的磁场约束位形,且在使用过程中,其线圈形状不能发生变形或偏移。但线圈系统在使用过程中,线圈通电产生磁场,电流的运动电荷在磁场中将产生电磁力(洛伦兹力),该电磁力会作用在线圈上,从而可能会使线圈的局部发生变形。一旦线圈在使用过程中,如局部因为电磁力作用而发生变形,将破坏磁场约束和位形,从而影响对核聚变的约束。
技术实现要素:
9.本发明的目的在于提供一种防止仿星器三维模块化线圈因受电磁力而变形的设计方法,适用于准环对称仿星器,所述准环对称仿星器包括线圈系统、真空系统和中央控制系统,在真空系统中激发等离子体,线圈系统用于产生磁场位形并约束等离子体的运动范围,线圈系统包括若干个呈环形结构的三维模块化的仿星器线圈,计算仿星器线圈各剖切截面上的各点所承受的电磁力;将仿星器线圈沿环向划分成若干个分段体,将每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到该分段体所承受的电磁力值,设定各分段体在承受电磁力时不会产生变形的上限值,在承受电磁力值大于设定上限值的分段体部位,设置线圈盒进行支撑,以防止该部位的线圈在通电过程中发生变形。
10.本发明解决技术问题,所采用的技术方案是:一种防止仿星器三维模块化线圈因受电磁力而变形的设计方法,适用于准环对称仿星器,所述准环对称仿星器包括线圈系统、真空系统、电源系统和中央控制系统,在真空系统中激发等离子体,所述线圈系统用于产生磁场位形并约束等离子体的运动范围,所述线圈系统包括若干个呈环形结构的三维模块化的仿星器线圈,所述设计方法包括如下步骤:步骤s100:计算找出仿星器线圈沿径向的各剖切截面的中心点;步骤s200:根据找到的仿星器线圈各剖切截面的中心点,计算找出仿星器线圈的各剖切截面;步骤s300:计算各剖切截面所承受的电磁力;步骤s400:将仿星器线圈分成若干个分段体,将每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到该分段体所承受的电磁力值;步骤s500:设定各分段体在承受电磁力时不会产生变形的上限值,将步骤s400计算得到的各分段体所承受的电磁力值与设定的上限值进行比较,找到承受电磁力值大于设定上限值的分段体;在承受电磁力值大于设定上限值的分段体部位,设置线圈盒进行支撑。
11.本发明提出的准环对称仿星器,所述线圈系统包括十六个呈环形结构的三维模块化的仿星器线圈,每个仿星器线圈的环厚为69mm,环宽为132mm,各剖切截面的面积为:69
×
132mm2。
12.优选的,在步骤s400中,将仿星器线圈沿环向划分成八个或十六个或其他数量的分段体。对每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到每个分段体所承受的电磁力值。
13.优选的,在步骤s500中,设定各分段体在承受电磁力时不会产生变形的上限值,为70000n至80000n。
14.上述防止仿星器三维模块化线圈因受电磁力而变形的设计方法,在步骤s100至步骤s300中,将每个仿星器线圈沿360
°
环向划分成48个剖切截面,48个剖切截面将仿星器线圈切分成48个区间。
15.进一步的,在步骤s100中,计算仿星器线圈沿径向各剖切截面的中心点,包括如下步骤:步骤s110:求仿线器线圈各剖切截面的环向角和极向角;式中:ζ表示环向角;ζ0表示第一个截面的环向角;θ表示极向角; cm、dm、em、fm表示相应的傅里叶分量;式中:π为常数,取值3.14;d为微分符号;ψ表示360
°
环向上不同截面的极向角,ψ的数值是(0,1),将一个线圈沿360
°
环向划分的48个剖切截面,第1个剖切截面的ψ值是1/48,第2个剖切截面的ψ值是2/48
……
第48个剖切截面的ψ值是48/48=1;m表示极向模数,指当前剖切截面所处的数量;步骤s120:求仿线器线圈内环限制面和外环限制面的坐标;仿线器线圈包括位于内圈的内环限制面和位于外周的外环限制面,其中:内环限制面的坐标为:外环限制面的坐标为:式中:r
in
表示内环限制面的球坐标、z
in
表示内环限制面的柱坐标;r
in mn
表示内环限制面的球坐标的傅里叶分量、z
in mn
表示内环限制面的柱坐标的傅里叶分量;rout
表示外环限制面的球坐标、z
out
表示外环限制面的柱坐标;r
out mn
表示外环限制面的球坐标的傅里叶分量、z
out mn
表示外环限制面的柱坐标的傅里叶分量;n为环向模数,指当前仿星器线圈在环向上所处的数量;n是准环对称仿星器的环向周期数,n=2;步骤s130:求仿线器线圈载流面数据的插值系数;仿星器线圈的载流面位于内限制面和外限制面之间,且载流面呈环状;通过读取内环限制面和外环限制面的参数,通过线性插值,得到载流面数据:式中:f
mn
表示傅里叶系数、f表示线性插值系数、a表示线性插值系数的曲面分布函数、tanh表示双面正切函数;步骤s140:求仿星器线圈沿径向各剖切截面的中心点;仿星器线圈沿径向的各剖切截面的中心点均位于仿星器线圈的载流面内;根据计算得到的载流面数据,求得仿星器线圈沿径向各剖切截面的中心点:式中:ccs表示载流面、r
ccs
表示载流面的球坐标、z
ccs
表示载流面的柱坐标;r
ccs
(θ,ζ)表示各剖切截面的球坐标;z
ccs
(θ,ζ)表示各剖切截面的柱坐标,通过剖切截面的球坐标和柱坐标而得到各剖切截面的中心点。
16.更进一步的,在步骤s200中,计算求得仿星器线圈的各剖切截面的方法,包括如下步骤:步骤s210:求各剖切截面的坐标式中:x
ccs
表示当前剖切截面水平方向的横轴坐标、y
ccs
表示当前剖切截面水平方向的纵轴坐标;式中:ζ1表示载流面上的环向角;θ1表示载流面上的极向角;dθ表示极向上的调整量,取值0.0033;dζ表示环向上的调整量,取值0.0103;
式中:r
in1
表示环向角改变后的内环载流面的球坐标、z
in1
表示环向角改变后的内环载流面的柱坐标;r
out1
表示环向角改变后的外环载流面的球坐标、z
out1
表示环向角改变后的外环载流面的柱坐标;式中:f1表示环向角改变后的载流面上的线性插值系数、a1表示环向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs1
是由环向角改变后的截流面上的线圈中心点的球坐标、z
ccs1
是由环向角改变后的截流面上的线圈中心点的柱坐标;x
ccs1
表示环向角改变后的载流面水平方向的横轴坐标、y
ccs1
表示环向角改变后的载流面水平方向的纵轴坐标;式中:r
in2
表示极向角改变后的内环载流面的球坐标、z
in2
表示极向角改变后的内环载流面的柱坐标;r
out2
表示极向角改变后的外环载流面的球坐标、z
out2
表示极向角改变后的外环载流面的柱坐标;
式中:f2表示极向角改变后的载流面上的线性插值系数、a2表示极向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs2
是由极向角改变后的截流面上的线圈中心点的球坐标、z
ccs2
是由极向角改变后的截流面上的线圈中心点的柱坐标;x
ccs2
表示极向角改变后的载流面水平方向的横轴坐标、y
ccs2
表示极向角改变后的载流面水平方向的纵轴坐标;步骤s220:确定线圈截面的坐标轴u、v式中:a是一个矢量,表示在载流面上环向角的变化矢量;a
x
表示矢量a在载流面上沿x轴方向上的投影;ay表示矢量a在载流面上沿y轴方向上的投影;az表示矢量a在载流面上沿z轴方向上的投影;b是一个矢量,表示在载流面上极向角的变化矢量;b
x
表示矢量b在载流面上沿x轴方向上的投影;by表示矢量b在载流面上沿y轴方向上的投影;bz表示矢量b在载流面上沿z轴方向上的投影;将矢量b单位化后,得到横轴坐标u;将矢量a单位化后,得到纵轴坐标v;步骤s230:确定各剖切截面根据步骤s100求得的各剖切截面的中心点,以及步骤s220求得的各剖切截面的横
轴坐标u和纵轴坐标v,连线得到各剖切截面。
17.上述防止仿星器三维模块化线圈因受电磁力而变形的设计方法,在步骤s300中,各剖切截面所承受电磁力的计算方法是:式中:表示仿星器线圈各剖切截面上所承受电磁力;∮是面积分符号、
∂
代表偏微分、t表示时间、表示面积的矢量、表示矢量面积的微分;τ表示体积、dτ表示体积的微分;表示一个系统中机械物质的动量;是麦克斯韦应力张量,物理意义是从外界流入系统的动量流密度;是系统中电磁场自身携带的动量密度;式中:表示系统中物质的力密度,单位是kn/m3;是特殊微分符号,同时也是一个矢量;式中:分别表示x轴、y轴、z轴的单位矢量;分别表示对x、y、z的偏微分;式中:ε表示介电常量,e表示电场,表示电场的矢量;μ表示磁导率;b表示磁场,;
应力张量中的磁场部分用矩阵表示:式中:b
x
、by、bz分别表示在x轴、y轴、z轴方向上的磁场;在时谐电磁场中为0。
18.本发明采用上述技术方案后,所达到的有益效果是:本发明提出的上述设计方法,能准确找出构成仿星器的十六个线圈中的每一个线圈上受到电磁力较大的部位,并在所受到的电磁力有可能造成线圈局部发生变形的部位设置线圈盒或支撑架,支撑该受力较大的部位,以防止该部位的线圈在通电过程中因受电磁力作用而发生变形。从而能防止线圈在使用过程中,如局部因为电磁力作用而发生变形,破坏磁场约束和位形。
附图说明
19.图1为本发明适用的准环对称仿星器cfqs上设置的十六个仿线器线圈的分布示意图:图2为各仿星器线圈上沿径向的任一剖切截面的位置示意图;图3为其中一个仿星器线圈上沿径向的剖切截面的位置示意图;图4为其中一个仿星器线圈上沿径向的剖切截面的三维结构示意图;图5为将其中一个仿星器线圈沿环向划分成八个分段体的划分示意图;图6为本发明实施例中找出的仿线器线圈上承受电磁力时将产生变形的部位,并在这些部位设置了线圈盒的示意图。
20.图中,l、仿星器线圈上沿径向的剖切截面;9、线圈盒;a、b、c、d分别为剖切截面上的四个点;rc表示截面上任意一点的坐标;rg表示每个截面中心点的坐标。
具体实施方式
21.下面结合附图进一步详细描述本发明的技术方案,但本发明的保护范围不局限于以下所述。
22.本发明的实施例提出一种防止仿星器三维模块化线圈因受电磁力而变形的设计
方法,适用于准环对称仿星器cfqs,所述准环对称仿星器cfqs包括线圈系统、真空系统、支撑系统、电源系统和中央控制系统,在真空系统中激发等离子体,真空系统用于等离子体或核聚变物质的运动,所述线圈系统用于产生磁场位形并约束等离子体或核聚变物质的运动范围,所述电源系统用于给线圈系统供电以产生磁场,在本实施方式提出的准环对称仿星器cfqs中,线圈系统包括十六个呈环形结构的非平面状的仿星器线圈,这十六个仿线器线圈均为三维模块化的线圈,且其分布示意图详见图1所示。
23.这十六个仿线器线圈在通电过程中将产生磁场,但仿线器线圈在通电产生磁场的过程中,电流的运动电荷在磁场中也将同时产生电磁力(洛伦兹力),该电磁力会作用在仿线器线圈上,从而可能会使仿线器线圈的局部发生变形。一旦仿线器线圈在使用过程中,如局部因为电磁力作用而发生变形,将破坏磁场约束和位形,从而影响对核聚变的约束。故必须对仿星器线圈在使用过程中可能发生变形的部位进行支撑,以防止仿星器线圈发生变形。
24.本实施方式提出的:防止仿星器三维模块化线圈因受电磁力而变形的设计方法,如图2至图6所示,包括如下步骤:步骤s100:计算找出各个仿星器线圈沿径向的各剖切截面l的中心点;图2至图4所示,为本实施方式在仿星器线圈上找到的任意一个或多个剖切截面l的示意图,在实际计算过程中,需要将每个仿星器线圈通过计算机仿真程序划分成若干个有限数量的剖切截面,并通过仿真运算程序分别找到这些剖切截面的中心点。
25.步骤s200:根据找到的仿星器线圈各剖切截面l的中心点,再计算找出仿星器线圈的各剖切截面l;步骤s300:计算仿星器线圈各剖切截面l所承受的电磁力;步骤s400:将仿星器线圈沿环向划分成若干个分段体,将每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到该分段体所承受的电磁力值;在本实施方式中,将各仿星器线圈沿环向划分成了八个分段体,参见图5所示;步骤s500:设定各分段体在承受电磁力时不会产生变形的上限值,将步骤s400计算得到的各分段体所承受的电磁力值与设定上限值进行比较,找到承受电磁力值大于设定上限值的分段体;在承受电磁力值大于设定上限值的分段体部位,设置线圈盒9进行支撑,防止产生变形。
26.上述防止仿星器三维模块化线圈因受电磁力而变形的设计方法,在步骤s100至步骤s300中,将每个仿星器线圈沿360
°
环向划分成48个剖切截面,48个剖切截面将仿星器线圈切分成48个区间。
27.进一步的,在步骤s100中,计算仿星器线圈沿径向各剖切截面的中心点,包括如下步骤:步骤s110:求仿线器线圈各剖切截面的环向角和极向角;式中:ζ表示环向角;ζ0表示第一个截面的环向角;θ表示极向角; cm、dm、em、fm表示相应的傅里叶分量;
式中:π为常数,取值3.14;d为微分符号;ψ表示360
°
环向上不同截面的极向角,ψ的数值是(0,1),将一个线圈沿360
°
环向划分的48个剖切截面,第1个剖切截面的ψ值是1/48,第2个剖切截面的ψ值是2/48
……
第48个剖切截面的ψ值是48/48=1;m表示极向模数,指当前剖切截面所处的数量,在本实施方式中,m的取值是1至48;步骤s120:求仿线器线圈内环限制面和外环限制面的坐标;仿线器线圈包括位于内圈的内环限制面和位于外周的外环限制面,其中:内环限制面的坐标为:外环限制面的坐标为:式中:r
in
表示内环限制面的球坐标、z
in
表示内环限制面的柱坐标;r
in mn
表示内环限制面的球坐标的傅里叶分量、z
in mn
表示内环限制面的柱坐标的傅里叶分量;r
out
表示外环限制面的球坐标、z
out
表示外环限制面的柱坐标;r
out mn
表示外环限制面的球坐标的傅里叶分量、z
out mn
表示外环限制面的柱坐标的傅里叶分量;n为环向模数,指当前仿星器线圈在环向上所处的数量,在本实施方式中,n的取值是1至16,或者-8至8;n是准环对称仿星器的环向周期数,n=2;步骤s130:求仿线器线圈载流面数据的插值系数;仿星器线圈的载流面位于内限制面和外限制面之间,且载流面呈环状;通过读取内环限制面和外环限制面的参数,通过线性插值,得到载流面数据:式中:f
mn
表示傅里叶系数、f表示线性插值系数、a表示线性插值系数的曲面分布函数、tanh表示双面正切函数;
步骤s140:求仿星器线圈沿径向各剖切截面的中心点;仿星器线圈沿径向的各剖切截面的中心点均位于仿星器线圈的载流面内;根据计算得到的载流面数据,求得仿星器线圈沿径向各剖切截面的中心点:式中:ccs表示载流面、r
ccs
表示载流面的球坐标、z
ccs
表示载流面的柱坐标;r
ccs
(θ,ζ)表示各剖切截面的球坐标;z
ccs
(θ,ζ)表示各剖切截面的柱坐标,通过剖切截面的球坐标和柱坐标而得到各剖切截面的中心点。
28.更进一步的,在步骤s200中,计算求得仿星器线圈的各剖切截面的方法,包括如下步骤:步骤s210:求各剖切截面的坐标式中:x
ccs
表示当前剖切截面水平方向的横轴坐标、y
ccs
表示当前剖切截面水平方向的纵轴坐标;式中:ζ1表示载流面上的环向角;θ1表示载流面上的极向角;dθ表示极向上的调整量,取值0.0033;dζ表示环向上的调整量,取值0.0103;式中:r
in1
表示环向角改变后的内环载流面的球坐标、z
in1
表示环向角改变后的内环载流面的柱坐标;r
out1
表示环向角改变后的外环载流面的球坐标、z
out1
表示环向角改变后的外环载流面的柱坐标;
式中:f1表示环向角改变后的载流面上的线性插值系数、a1表示环向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs1
是由环向角改变后的截流面上的线圈中心点的球坐标、z
ccs1
是由环向角改变后的截流面上的线圈中心点的柱坐标;x
ccs1
表示环向角改变后的载流面水平方向的横轴坐标、y
ccs1
表示环向角改变后的载流面水平方向的纵轴坐标;式中:r
in2
表示极向角改变后的内环载流面的球坐标、z
in2
表示极向角改变后的内环载流面的柱坐标;r
out2
表示极向角改变后的外环载流面的球坐标、z
out2
表示极向角改变后的外环载流面的柱坐标;式中:f2表示极向角改变后的载流面上的线性插值系数、a2表示极向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs2
是由极向角改变后的截流面上的线圈中心点的球坐标、z
ccs2
是由极向角改变后的截流面上的线圈中心点的柱坐标;x
ccs2
表示极向角改变后的载流面水平方向的横轴坐标、y
ccs2
表示极向角改变后的载流面水平方向的纵轴坐标;步骤s220:确定线圈截面的坐标轴u、v
式中:a是一个矢量,表示在载流面上环向角的变化矢量;a
x
表示矢量a在载流面上沿x轴方向上的投影;ay表示矢量a在载流面上沿y轴方向上的投影;az表示矢量a在载流面上沿z轴方向上的投影;b是一个矢量,表示在载流面上极向角的变化矢量;b
x
表示矢量b在载流面上沿x轴方向上的投影;by表示矢量b在载流面上沿y轴方向上的投影;bz表示矢量b在载流面上沿z轴方向上的投影;将矢量b单位化后,得到横轴坐标u;将矢量a单位化后,得到纵轴坐标v;步骤s230:确定各剖切截面根据步骤s100求得的各剖切截面的中心点,以及步骤s220求得的各剖切截面的横轴坐标u和纵轴坐标v,连线得到各剖切截面。
29.在本实施方式中,仿星器线圈各剖切截面的面积是:69*132,单位是mm2,即各仿星器线圈的环厚为69mm,环宽为132mm。
30.即:本发明提出的准环对称仿星器,所述线圈系统包括十六个呈环形结构的三维模块化的仿星器线圈,每个仿星器线圈的环厚均为69mm,环宽均为132mm,各剖切截面的面积为:69
×
132mm2。
31.由中心点和横轴坐标u和纵轴坐标v,就可以得到截面的四个坐标,并得到各剖切截面,如图4所示,图4中的a、b、c、d四个点,即为一个剖切截面上的四个角点。图4中示出了横轴坐标u和纵轴坐标v,以及剖切截面上的四个角点a、b、c、d。另外,图4中示出的rc表示截面上任意一点的坐标;rg表示每个截面中心点的坐标。
32.更进一步的,在步骤s300中,各剖切截面所承受电磁力的计算方法是:
式中:表示仿星器线圈各剖切截面上所承受电磁力;∮是面积分符号、
∂
代表偏微分、t表示时间、表示面积的矢量、表示矢量面积的微分;τ表示体积、dτ表示体积的微分;表示一个系统中机械物质的动量;是麦克斯韦应力张量,物理意义是从外界流入系统的动量流密度;是系统中电磁场自身携带的动量密度;式中:表示系统中物质的力密度,单位是kn/m3;是特殊微分符号,同时也是一个矢量;式中:分别表示x轴、y轴、z轴的单位矢量;分别表示对x、y、z的偏微分;式中:ε表示介电常量,e表示电场,表示电场的矢量;μ表示磁导率;b表示磁场,;应力张量中的磁场部分用矩阵表示:
式中:b
x
、by、bz分别表示在x轴、y轴、z轴方向上的磁场;在时谐电磁场中为0。
33.本实施方式中,在步骤s400中,将仿星器线圈沿环向划分成了八个分段体,当然也可以将仿星器线圈沿环向划分成十六个或其他数量的分段体。图5所示的是对其中一个仿星器线圈沿环向划分成八个分段体的划分示意图,图5中的x表示坐标轴的横轴方向,即x轴,z表示坐标轴的纵轴方向,即z轴。对这八个分段体上的各剖切截面所承受的电磁力进行积分求和,得到每个分段体所承受的电磁力值,图5所示的这一个仿星器线圈,其八个分段体上所承受的电磁力,经其计算,八个分段体的数值分别如下:图5中,z轴向上穿过的分段体为第1分段体,顺时针排序,依次为第2至第8分段体。
34.经过力学计算,得到各分段体在承受电磁力时不会产生变形的上限值,在本施方式中,经计算得到的各分段体在承受电磁力时不会产生变形的上限值为70000n。将该值作为步骤s500中,确定的各分段体在承受电磁力时不会产生变形的上限值。
35.在十六个仿星器线圈中分别找到其值大于70000n标准限值的分段体,并在这些分段体部位上设置能支撑该部位仿星器线圈的线圈盒9,具体如图6所示,以支撑该承受电磁力较大的部位,以防止该部位的线圈在通电过程中因受电磁力作用而发生变形。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。