1.本发明属于声呐部署优化和声呐性能优化技术领域,具体地说,涉及一种浅海动态环境下蛙人探测声呐部署优化方法及其装置。
背景技术:
2.蛙人探测声呐的探测性能受海洋环境的影响显著。在动态水文变化及不同海洋地理环境条件下,声呐部署的深度和位置影响海上实际探测性能。目前已有学者对声呐最佳布放深度展开研究。郁红波等人在浅海条件下吊放声呐最佳入水深度的研究中通过潜艇在不同深度航行的概率分布,计算出吊放声呐不同入水深度下的平均探测距离,得到了不同声速剖面下吊放声呐的最佳入水深度;熊雄等人在水下目标探测中声呐工作深度优化选择中以等效作用距离最大准则为基础,提出距离调节因子的声呐工作深度优化选择模型,得到不同战术任务下声呐的最优工作深度。因此,上述现有技术都是基于声呐的作用距离最大准则选择最佳工作深度,但是,实际声呐应用中常常对某海区固定区域进行探测,并没有发现以声呐对目标区域的探测概率最大为准则去选择最佳工作深度。
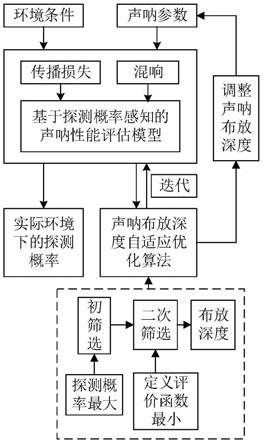
3.假设目标位置已知,当浅海海洋环境变化时,声呐发射的声信号传播路径改变会影响声呐方程中的传播损失,从而影响声呐对目标的探测性能。为提高声呐的环境适应能力,需要研究声呐部署方式的优化技术。研究表明,声呐的探测性能受其布放深度的影响较大,因此,适当调整布放深度可优化其性能。以图1为研究思路研究在动态海洋环境下布放深度的自适应调整;如图1所示,现有的声呐部署方法包括:根据环境条件和声呐参数计算待布放声呐作用海区的传播损失和混响,然后利用基于概率感知的声呐性能评估模型计算探测概率,最后使用声呐布放深度自适应优化算法计算声呐的最佳布放深度。
4.以往研究主动声呐的最佳布放深度时,通常以等效作用距离最大为准则选择最佳布放深度。但是,该方法存在一定的技术问题:由于目标并不一定位于等效作用距离最大值所在的深度上,通过该准则得出的数据不具有普遍性,无法获得最佳的布放深度。
技术实现要素:
5.为了解决现有技术存在的问题,本发明提出了一种浅海动态环境下蛙人探测声呐部署优化方法,该方法考虑在浅海动态环境下,假设目标位置已知,计算蛙人探测声呐对目标的探测概率,以不同的择优准则进行两次筛选得到声呐的最佳布放深度。
6.本发明提供了一种浅海动态环境下蛙人探测声呐部署优化方法,该方法包括:
7.将待布放声呐布放在目标海区内,形成声呐工作海区,并记录待布放声呐的初始位置,同时在水平和深度方向分别以预设的步长进行栅格化,得到多个栅格工作海区;
8.根据获取的声呐工作海区的环境条件和待布放声呐的声呐参数,采用高斯波束跟踪理论,计算传播损失;采用混响模型,计算混响;
9.基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;
10.采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;
11.根据得到的待布放声呐的最优布放深度和记录的待布放声呐的初始位置,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。
12.作为上述技术方案的改进之一,所述声呐工作海区的环境条件为水文情况,该水文情况具体表现为声呐工作海区海水的声速c;所述声呐参数包括:掠射角、声源级和检测阈。
13.作为上述技术方案的改进之一,所述根据获取的声呐工作海区的环境条件,采用高斯波束跟踪理论,计算传播损失;根据获取的待布放声呐的声呐参数,采用混响公式,计算混响;其具体过程包括:
14.假设声线声压u(s,n)表示为,
15.u(s,n)=a(s)φ(s,n)e
jwτ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
16.其中,a为沿声线方向的振幅;φ为垂直于声线中心方向的位移;s为沿声线方向的弧线;n为垂直于声线中心方向的位移;w为圆频率;τ为沿声线的传播时间;j为虚数;
17.在预先建立的柱坐标系下,控制方程为,
[0018][0019]
其中,r和z分别表示水平距离和深度;ζ和ξ为与掠射角有关的两个中间变量,c为声速;
[0020][0021]
其中,θ为掠射角;
[0022]
高斯射线束的变化过程通过引入两个变量p和q来控制,如式(4)和(5)所示,
[0023][0024][0025]
其中,c
nn
是声速在声线路径法线方向上的二阶导数;因此,利用φ和a表示为高斯声线宽度w的函数:
[0026][0027]
其中,δα为临近声线的夹角;
[0028]
然后将声线声压ui(s,n)转化为柱坐标系下的声压ui(r,z),用携带能量的声线叠加得到最后的声场;采用非相干的计算方式,声压ps为:
[0029][0030]
其中,z0为待布放声呐的入水深度,即待布放声呐的初始位置;c0为声源处的声速;
[0031]
采用高斯波束跟踪理论,计算传播损失tl:
[0032][0033]
根据获取的待布放声呐的声呐参数,采用混响模型,计算混响rl:
[0034]
rl=sl-2tl tsrꢀꢀ
(9)
[0035]
其中,sl为声源级,tl为传播损失,tsr为目标反射强度,其中,tsr由下式计算得到:
[0036][0037]
其中,lb为距离分辨力,r为水平距离,θ为掠射角。
[0038]
作为上述技术方案的改进之一,所述基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;其具体过程包括:
[0039]
基于传播损失tl和混响rl,计算信号余量se(r,zs,zg):
[0040]
se(r,zs,zg)=sl-2tl(r,zs,zg) ts-nl(r,zs,zg)-dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0041]
其中,r表示水平距离,zs表示声源深度,zg表示目标的深度,nl(r,zs,zg)为总噪声级;ts为目标强度;dt为检测阈;
[0042]
其中,
[0043][0044]
其中,an为环境噪声级,agn为接收阵列的噪声增益,rl为混响;
[0045]
将探测概率与信号余量相关联,建立基于探测概率感知的声呐性能评估模型:
[0046][0047]
其中,pd为探测概率;σ为该模型的标准差;
[0048]
根据上式(13),得到待布放声呐对声呐工作海区内每个栅格工作海区声呐处目标的实际环境下探测概率。
[0049]
作为上述技术方案的改进之一,所述采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;其具体过程包括:
[0050]
初次筛选过程中,在目标海区全深度以δzs为间隔选取多个待布放声呐可能的布放深度,利用基于探测概率感知的声呐性能评估模型,计算所选取的各深度下的探测概率pd;
[0051]
以待布放声呐对已知目标位置处的探测概率最大为准则,将上述计算的各深度下的探测概率进行从大到小排序,选择最大探测概率对应的布放深度,以a为间隔选取待布放声呐可能的布放深度,作为次优深度区间:
[0052][0053]
其中,zs为声源深度;rg为目标在距离方向上的位置;zg为目标在深度方向上的位置;
[0054]
针对得到的次优深度区间,计算每个待布放声呐可能的布放深度对应的评价函数值g:
[0055][0056]
其中,为声呐的等效作用距离的均值,为声呐的等效作用距离的均值,为归一化后的等效作用距离,为声呐归一化后等效平均距离的标准差,m为次优深度区间被划分的个数;r为等效作用距离;α,β,δ为不同的加权系数,且有α β δ=1;
[0057]
再依据评价函数最小为准则进行第二次筛选,获取最小化评价函数值对应的可能的布放深度,将其作为待布放声呐的最优布放深度
[0058][0059]
本发明还提供了一种浅海动态环境下蛙人探测声呐部署优化装置,该装置包括:
[0060]
传播损失与混响级获取模块,用于根据获取的声呐工作海区的环境条件,采用高斯波束跟踪理论,计算传播损失;根据获取的待布放声呐的声呐参数,采用混响公式,计算混响;
[0061]
探测概率获取模块,用于基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算声呐对特定区域内各处目标的实际环境下探测概率;和
[0062]
部署优化模块,用于采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;根据得到的待布放声呐的最优布放深度,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。
[0063]
本发明还提供了一种声呐部署优化的计算机设备,包括处理器、存储器以及存储
在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现所述的方法。
[0064]
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行所述的方法。
[0065]
本发明还提供了一种信息数据处理终端,所述信息数据处理终端用于实现所述的方法。
[0066]
本发明与现有技术相比的有益效果是:
[0067]
1.本发明的方法所建立的基于探测概率感知的声呐性能评估模型可根据水声环境及声呐系统的工作参数定量地给出系统对特定区域内各处目标的探测能力;
[0068]
2.本发明的方法以不同准则进行两次筛选优化,可得到对特定目标位置探测的最佳布放深度,极大地改善了声呐对目标的探测性能。
附图说明
[0069]
图1是现有技术的声呐部署方法的方法流程图;
[0070]
图2是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的概述方法流程图;
[0071]
图3a是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的中午水文1变化图;
[0072]
图3b是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的傍晚水文2变化图;
[0073]
图4是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的第一次筛选计算结果图;
[0074]
图5是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的第二次筛选计算结果图;
[0075]
图6是本发明的一种浅海动态环境下蛙人探测声呐部署优化方法的具体方法流程图。
具体实施方式
[0076]
现结合附图对本发明作进一步的描述。
[0077]
本发明提供了一种浅海动态环境下蛙人探测声呐部署优化方法,通过调整声呐布放深度优化声呐的探测性能,进而可辅助声呐对小目标的识别,检测,追踪等工作;为提高浅海动态环境下蛙人探测声呐的性能,本发明以不同准则进行两次筛选优化后得到声呐最佳布放深度。
[0078]
如图2和6所示,该方法包括:
[0079]
步骤1)将待布放声呐布放在目标海区内,形成声呐工作海区,并记录待布放声呐的初始位置,同时在水平和深度方向分别以预设的步长进行栅格化,得到多个栅格工作海区;
[0080]
步骤2)获取声呐工作海区的环境条件和声呐参数;其中,声呐工作海区的环境条
件包括海底地形以及水文情况;该水文情况具体表现为声呐工作海区海水的声速c;所述声呐参数包括:掠射角、声源级和检测阈;
[0081]
根据获取的声呐工作海区的环境条件和获取的待布放声呐的声呐参数,采用高斯波束跟踪理论,计算传播损失;采用混响公模型,计算混响;
[0082]
假设声线声压u(s,n)表示为,
[0083]
u(s,n)=a(s)φ(s,n)e
jwτ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0084]
其中,a为沿声线方向的振幅;φ为垂直于声线中心方向的位移;s为沿声线方向的弧线;n为垂直于声线中心方向的位移;w为圆频率;τ为沿声线的传播时间;j为虚数;
[0085]
在预先建立的柱坐标系下,控制方程为,
[0086][0087]
其中,r和z分别表示水平距离和深度;ζ和ξ为与掠射角有关的两个中间变量,c为声速;
[0088][0089]
其中,θ为掠射角;
[0090]
高斯射线束的变化过程通过引入两个变量p和q来控制,如式(4)和(5)所示,
[0091][0092][0093]
其中,c
nn
是声速在声线路径法线方向上的二阶导数;因此,利用φ和a表示为高斯声线宽度w的函数:
[0094][0095]
其中,δα为临近声线的夹角;
[0096]
然后将声线声压ui(s,n)转化为柱坐标系下的声压ui(r,z),用携带能量的声线叠
加得到最后的声场;采用非相干的计算方式,声压ps为:
[0097][0098]
其中,z0为待布放声呐的入水深度,即待布放声呐的初始位置;c0为声源处的声速;
[0099]
采用高斯波束跟踪理论,计算传播损失tl:
[0100][0101]
根据获取的待布放声呐的声呐参数,采用下述的混响模型,计算混响rl:
[0102]
rl=sl-2tl tsrꢀꢀ
(9)
[0103]
其中,sl为声源级,tl为传播损失,tsr为目标反射强度,其中,tsr由下式计算得到:
[0104][0105]
其中,lb为距离分辨力,r为水平距离,θ为掠射角。
[0106]
步骤3)基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算待布放声呐对声呐工作海区内各栅格工作海区声呐处目标的实际环境下探测概率;
[0107]
具体地,基于传播损失tl和混响rl,计算信号余量se(r,zs,zg):
[0108]
se(r,zs,zg)=sl-2tl(r,zs,zg) ts-nl(r,zs,zg)-dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0109]
其中,r表示水平距离,zs表示声源深度,zg表示目标的深度,nl(r,zs,zg)为总噪声级;ts为目标强度;dt为检测阈;
[0110]
其中,
[0111][0112]
其中,an为环境噪声级,agn为接收阵列的噪声增益,rl为混响;
[0113]
将探测概率与信号余量相关联,建立基于探测概率感知的声呐性能评估模型:
[0114][0115]
其中,pd为探测概率;σ为该模型的标准差;
[0116]
根据上式(13),得到待布放声呐对声呐工作海区内每个栅格工作海区声呐处目标的实际环境下探测概率。
[0117]
步骤4)获取需要探测的目标所在位置处的深度和水平距离;
[0118]
步骤5)采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;
[0119]
具体地,在海洋环境发生变化后,为提高声呐的探测性能调整待布放声呐的布放深度;初次筛选过程中,在目标海区全深度以δzs为间隔选取多个待布放声呐可能的布放深度,利用基于探测概率感知的声呐性能评估模型,计算所选取的各深度下的探测概率pd;
[0120]
最后以待布放声呐对已知目标位置处的探测概率最大为准则,将上述计算的各深度下的探测概率进行从大到小排序,选择最大探测概率对应的布放深度,并以a为间隔选取
多个待布放声呐可能的布放深度,作为次优深度区间:
[0121][0122]
其中,zs为声源深度;rg为目标在水平距离方向上的位置;zg为目标在深度方向上的位置;
[0123]
步骤6)针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;
[0124]
具体地,针对得到的次优深度区间,以a为间隔选取多个待布放声呐可能的布放深度,再依据评价函数最小为准则,寻找待布放声呐的最佳布放深度;其中,所用准则与探测概率最大准则略有不同。首先定义评价函数g:
[0125][0126]
其中,为声呐的等效作用距离的均值,为声呐的等效作用距离的均值,为归一化后的等效作用距离,为声呐归一化后等效平均距离的标准差,m为次优深度区间被划分的个数;r为等效作用距离;α,β,δ为不同的加权系数,且有α β δ=1;
[0127]
其中,在计算得到探测概率后,定义等效作用距离r(zs,zg)为探测概率在距离上的积分,将其作为度量依据。等效作用距离并不是声呐实际的作用距离范围,而是对声呐探测能力的简单度量。
[0128]
映了声呐对已知目标所处位置的探测性能;声呐的等效作用距离反映了声呐对试验海区的探测性能;等效作用距离的标准差反映了声呐对试验海区探测性能的稳定性。
[0129]
因此,第二次迭代寻优过程要通过最小化评价函数值获得待布放声呐的最优布放深度
[0130][0131]
实际计算过程中,可根据实际需求调整加权系数选择达到择优目的。
[0132]
步骤7)根据得到的待布放声呐的最优布放深度和记录的待布放声呐的初始位置,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。
[0133]
实施例1.
[0134]
本发明提供了一种浅海动态环境下蛙人探测声呐部署优化方法,该方法包括:
[0135]
步骤11)夏季浅海海水受太阳照射温度升高,声速剖面一天内可能发生多次变化,影响声呐对目标的探测性能。设某海域某天的声速剖面变化如图3a和3b所示,仿真水文变化前后声呐对目标的探测概率并进行优化调整,仿真时各参数设定如表2。已知声源深度为9m,目标位于深度方向10m,水平方向920m处,由式(13)可分别求得不同水文时声呐对该目标的探测概率,由表2得到水文2情况下声呐对目标位置的探测概率降低。
[0136][0137]
表1基于探测概率感知的声呐性能评估模型参数
[0138][0139]
表2不同水文下声呐对目标的探测概率
[0140][0141][0142]
步骤12)使用提出的声呐布放深度自适应优化算法调整待布放声呐的布放深度,使得待布放声呐对目标位置的探测概率达到最优。以探测概率最大为准则,初筛选以δzs=1m为间隔选取待布放声呐可能的布放深度,采用式(14)计算次优深度区间。迭代结果如图4所示,得到次优深度区间为[10m,18m]。
[0143][0144]
步骤13)然后在次优深度区间,以评价函数最小为准则,进行第二次筛选寻优,以a=0.1m为间隔选取各待布放声呐可能的布放深度。采用式(13)计算各布放深度对应的评价函数值,评价函数中的加权系数分别为:α=0.8,β=0.1,δ=0.1。迭代结果如图5所示。
[0145][0146]
其中,为声呐的等效作用距离的均值,为声呐的等效作用距离的均值,为归一化后的等效作用距离,为声呐归一化后等效平均距离的标准差,m为次优深度区间被划分的个数;r为目标海区水平距离;α,β,δ为不同的加权系数,且有α β δ=1。
[0147]
步骤14)最后以最小化评价函数值为准则,得到声呐的最佳布放深度为10.2m,调整前后的探测概率如表3,此时探测概率比未调整深度前提高了14.22%。
[0148][0149]
表3布放深度调整前后声呐对目标的探测概率
[0150]
[0151]
由上述结果可知,本发明能够通过调整声呐布放深度较好的提高声呐探测性能。
[0152]
本发明的方法提出了以不同准则进行两次筛选优化后得到待布放声呐最佳布放深度,改进了之前仅以最大作用距离为准则计算最佳声呐布放深度的方法,提高了声呐的探测性能。良好的探测性能可辅助声呐对小目标的识别,检测,追踪等工作。
[0153]
实施例2.
[0154]
本发明还提供了一种浅海动态环境下蛙人探测声呐部署优化装置,该装置包括:
[0155]
传播损失与混响级获取模块,用于根据获取的声呐工作海区的环境条件,采用高斯波束跟踪理论,计算传播损失;根据获取的待布放声呐的声呐参数,采用混响公式,计算混响;
[0156]
探测概率获取模块,用于基于传播损失和混响,建立基于探测概率感知的声呐性能评估模型,计算声呐对特定区域内各处目标的实际环境下探测概率;和
[0157]
部署优化模块,用于采用声呐布放深度自适应优化算法,以探测概率最大为准则进行初筛,选择次优布放深度区间;针对所选择的次优深度区间,以评价函数最小为准则,再进行二次筛选,获得待布放声呐的最优布放深度;根据得到的待布放声呐的最优布放深度,调整待布放声呐的布放深度,从而完成浅海动态环境下蛙人探测声呐部署优化。
[0158]
本发明还提供了一种声呐部署优化的计算机设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现所述的方法。
[0159]
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行所述的方法。
[0160]
本发明还提供了一种信息数据处理终端,所述信息数据处理终端用于实现所述的方法。
[0161]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。