技术特征:
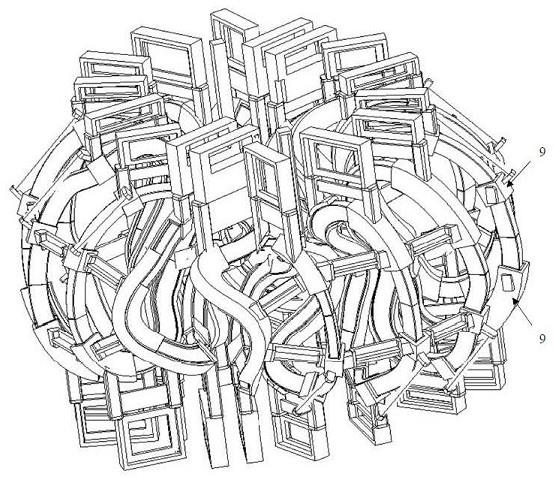
1.一种防止仿星器三维模块化线圈因受电磁力而变形的设计方法,适用于准环对称仿星器,所述准环对称仿星器包括线圈系统、真空系统、电源系统和中央控制系统,在真空系统中激发等离子体,所述线圈系统用于产生磁场位形并约束等离子体的运动范围,所述线圈系统包括若干个呈环形结构的三维模块化的仿星器线圈,其特征在于,防止仿星器三维模块化线圈因受电磁力而变形的设计方法包括如下步骤:步骤s100:计算找出仿星器线圈沿径向的各剖切截面的中心点;步骤s200:根据找到的仿星器线圈各剖切截面的中心点,计算找出仿星器线圈的各剖切截面;步骤s300:计算各剖切截面所承受的电磁力;步骤s400:将仿星器线圈分成若干个分段体,将每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到该分段体所承受的电磁力值;步骤s500:设定各分段体在承受电磁力时不会产生变形的上限值,将步骤s400计算得到的各分段体所承受的电磁力值与设定的上限值进行比较,找到承受电磁力值大于设定上限值的分段体;在承受电磁力值大于设定上限值的分段体部位,设置线圈盒进行支撑。2.根据权利要求1所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,所述线圈系统包括十六个呈环形结构的三维模块化的仿星器线圈,每个仿星器线圈的环厚为69mm,环宽为132mm,各剖切截面的面积为:69
×
132mm2。3.根据权利要求1所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s400中,将仿星器线圈沿环向划分成八个或十六个或其他数量的分段体。4.根据权利要求1所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s500中,设定各分段体在承受电磁力时不会产生变形的上限值为70000n至80000n。5.根据权利要求1所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s100至步骤s300中,将每个仿星器线圈沿360
°
环向划分成48个剖切截面,48个剖切截面将仿星器线圈切分成48个区间。6.根据权利要求5所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s100中,计算仿星器线圈沿径向各剖切截面的中心点,包括如下步骤:步骤s110:求仿线器线圈各剖切截面的环向角和极向角;式中:ζ表示环向角;ζ0表示第一个截面的环向角;θ表示极向角; c
m
、d
m
、e
m
、f
m
表示相应的傅里叶分量;
式中:π为常数,取值3.14;d为微分符号;ψ表示360
°
环向上不同截面的极向角,ψ的数值是(0,1),将一个线圈沿360
°
环向划分的48个剖切截面,第1个剖切截面的ψ值是1/48,第2个剖切截面的ψ值是2/48
……
第48个剖切截面的ψ值是48/48=1;m表示极向模数,指当前剖切截面所处的数量;步骤s120:求仿线器线圈内环限制面和外环限制面的坐标;仿线器线圈包括位于内圈的内环限制面和位于外周的外环限制面,其中:内环限制面的坐标为:外环限制面的坐标为:式中:r
in
表示内环限制面的球坐标、z
in
表示内环限制面的柱坐标;r
in mn
表示内环限制面的球坐标的傅里叶分量、z
in mn
表示内环限制面的柱坐标的傅里叶分量;r
out
表示外环限制面的球坐标、z
out
表示外环限制面的柱坐标;r
out mn
表示外环限制面的球坐标的傅里叶分量、z
out mn
表示外环限制面的柱坐标的傅里叶分量;n为环向模数,指当前仿星器线圈在环向上所处的数量;n是准环对称仿星器的环向周期数,n=2;步骤s130:求仿线器线圈载流面数据的插值系数;仿星器线圈的载流面位于内限制面和外限制面之间,且载流面呈环状;通过读取内环限制面和外环限制面的参数,通过线性插值,得到载流面数据:式中:f
mn
表示傅里叶系数、f表示线性插值系数、a表示线性插值系数的曲面分布函数、tanh表示双面正切函数;步骤s140:求仿星器线圈沿径向各剖切截面的中心点;
仿星器线圈沿径向的各剖切截面的中心点均位于仿星器线圈的载流面内;根据计算得到的载流面数据,求得仿星器线圈沿径向各剖切截面的中心点:式中:ccs表示载流面、r
ccs
表示载流面的球坐标、z
ccs
表示载流面的柱坐标;r
ccs
(θ,ζ)表示各剖切截面的球坐标;z
ccs
(θ,ζ)表示各剖切截面的柱坐标,通过剖切截面的球坐标和柱坐标而得到各剖切截面的中心点。7.根据权利要求6所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s200中,计算求得仿星器线圈的各剖切截面的方法,包括如下步骤:步骤s210:求各剖切截面的坐标式中:x
ccs
表示当前剖切截面水平方向的横轴坐标、y
ccs
表示当前剖切截面水平方向的纵轴坐标;式中:ζ1表示载流面上的环向角;θ1表示载流面上的极向角;dθ表示极向上的调整量,取值0.0033;dζ表示环向上的调整量,取值0.0103;式中:r
in1
表示环向角改变后的内环载流面的球坐标、z
in1
表示环向角改变后的内环载流面的柱坐标;r
out1
表示环向角改变后的外环载流面的球坐标、z
out1
表示环向角改变后的外环载流面的柱坐标;
式中:f1表示环向角改变后的载流面上的线性插值系数、a1表示环向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs1
是由环向角改变后的截流面上的线圈中心点的球坐标、z
ccs1
是由环向角改变后的截流面上的线圈中心点的柱坐标;x
ccs1
表示环向角改变后的载流面水平方向的横轴坐标、y
ccs1
表示环向角改变后的载流面水平方向的纵轴坐标;式中:r
in2
表示极向角改变后的内环载流面的球坐标、z
in2
表示极向角改变后的内环载流面的柱坐标;r
out2
表示极向角改变后的外环载流面的球坐标、z
out2
表示极向角改变后的外环载流面的柱坐标;式中:f2表示极向角改变后的载流面上的线性插值系数、a2表示极向角改变后的载流面上的线性插值系数的曲面分布函数;r
ccs2
是由极向角改变后的截流面上的线圈中心点的球坐标、z
ccs2
是由极向角改变后的截流面上的线圈中心点的柱坐标;x
ccs2
表示极向角改变后的载流面水平方向的横轴坐标、y
ccs2
表示极向角改变后的载流面水平方向的纵轴坐标;步骤s220:确定线圈截面的坐标轴u、v
式中:a是一个矢量,表示在载流面上环向角的变化矢量;a
x
表示矢量a在载流面上沿x轴方向上的投影;a
y
表示矢量a在载流面上沿y轴方向上的投影;a
z
表示矢量a在载流面上沿z轴方向上的投影;b是一个矢量,表示在载流面上极向角的变化矢量;b
x
表示矢量b在载流面上沿x轴方向上的投影;b
y
表示矢量b在载流面上沿y轴方向上的投影;b
z
表示矢量b在载流面上沿z轴方向上的投影;将矢量b单位化后,得到横轴坐标u;将矢量a单位化后,得到纵轴坐标v;步骤s230:确定各剖切截面根据步骤s100求得的各剖切截面的中心点,以及步骤s220求得的各剖切截面的横轴坐标u和纵轴坐标v,连线得到各剖切截面。8.根据权利要求7所述的防止仿星器三维模块化线圈因受电磁力而变形的设计方法,其特征在于,在步骤s300中,各剖切截面所承受电磁力的计算方法是:式中:表示仿星器线圈各剖切截面上所承受电磁力;∮是面积分符号、
∂
代表偏微分、t表示时间、表示面积的矢量、表示矢量面积的微分;τ表示体积、dτ表示体积的微分;表示一个系统中机械物质的动量;
是麦克斯韦应力张量,物理意义是从外界流入系统的动量流密度;是系统中电磁场自身携带的动量密度;式中:表示系统中物质的力密度,单位是kn/m3;是特殊微分符号,同时也是一个矢量;式中:分别表示x轴、y轴、z轴的单位矢量;分别表示对x、y、z的偏微分;式中:ε表示介电常量,e表示电场,表示电场的矢量;μ表示磁导率;b表示磁场,;应力张量中的磁场部分用矩阵表示:式中:b
x
、b
y
、b
z
分别表示在x轴、y轴、z轴方向上的磁场;在时谐电磁场中为0。
技术总结
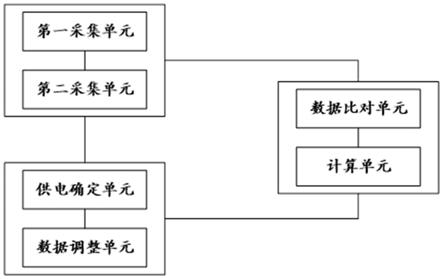
本发明提供一种防止仿星器三维模块化线圈因受电磁力而变形的设计方法,适用于准环对称仿星器,所述准环对称仿星器包括线圈系统、真空系统和中央控制系统,在真空系统中激发等离子体,线圈系统用于产生磁场位形并约束等离子体的运动范围,线圈系统包括若干个呈环形结构的三维模块化的仿星器线圈,计算仿星器线圈各剖切截面所承受的电磁力;将仿星器线圈分成若干个分段体,将每个分段体上的各剖切截面所承受的电磁力进行积分求和,得到该分段体所承受的电磁力值,设定各分段体在承受电磁力时不会产生变形的上限值,在承受电磁力值大于设定上限值的分段体部位,设置线圈盒进行支撑,以防止该部位的线圈在通电过程中发生变形。防止该部位的线圈在通电过程中发生变形。防止该部位的线圈在通电过程中发生变形。
技术研发人员:许宇鸿 许峻铭 刘海峰 熊国臻 罗杨 张欣
受保护的技术使用者:西南交通大学
技术研发日:2022.04.11
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。