1.本发明属于车辆控制技术领域,具体涉及一种分布式电控悬架控制系统及其控制方法。
背景技术:
2.悬架是车辆车架与车轮之间的连接传力结构的总称,其作用为吸收和缓和行驶过程中因路面不平引起的车轮跳动而传给车架的冲击和振动,以及将路面作用于车轮上的各种力与产生的力矩传递到车架(或承载式车身)上。
3.悬架决定着汽车的稳定性、舒适性和安全性,随着车辆智能化程度与电子控制技术的不断提升,在保证安全性的前提下,人们追求着更好的驾驶体验和舒适性。但传统悬架系统只能在一定路况下发挥最优性能,能主动调控悬架阻尼与车身高度的电控悬架因此愈发受到人们的青睐。
4.电控悬架能够根据车身高度、车速、转向角度及速率、制动等信号,由电子控制单元控制悬架执行机构,改变悬架系统的刚度、减振器的阻尼力以及车身高度等参数,使得汽车能在多种路况下获得良好的乘坐舒适性、操纵稳定性和通过性。
5.当前电控悬架系统的传感器和执行机构分布在四个车轮附近,此外还有一个独立的电控悬架控制器,传感器采集车辆和环境数据后传输给控制器,控制器对车辆和环境数据进行处理后做出电控悬架调整决策,将执行指令再发送给分布在四个车轮附近的电控悬架执行机构,这样的布置需要较多的线束和一个独立的控制器,成本较高。
技术实现要素:
6.针对现有技术的上述不足,本发明要解决的技术问题是提供一种分布式电控悬架控制系统及其控制方法,避免独立电控悬架控制器而带来的线束和控制器成本增加的问题。
7.为解决上述技术问题,本发明采用如下技术方案:一种分布式电控悬架控制系统,包括:车辆上用于获取车辆信息和道路环境信息的若干传感器,用于调整悬架系统的各执行机构;还包括设于车辆上的若干区域控制器,区域控制器信号连接一个或多个就近的传感器以及一个或多个就近的执行机构,所述若干区域控制器接入车载网络并通过车载网络实现区域控制器之间的通讯连接。
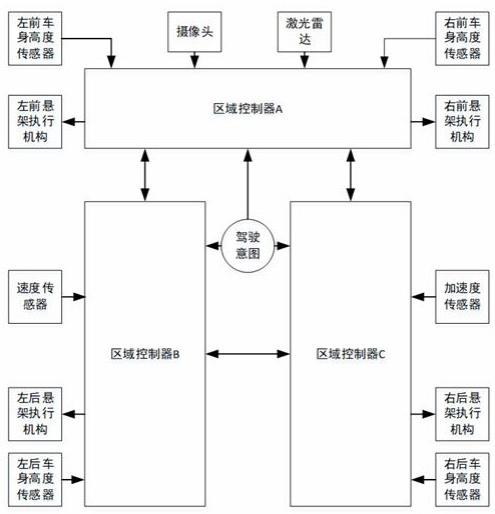
8.进一步完善上述技术方案,所述若干区域控制器包括第一区域控制器、第二区域控制器和第三区域控制器,第一区域控制器位于车辆前部,第二区域控制器和第三区域控制器位于车辆后部且左右并排设置;所述若干传感器包括左前车身高度传感器、右前车身高度传感器、左后车身高度传感器、右后车身高度传感器、速度传感器和加速度传感器;所述执行机构包括左前悬架执行机构、右前悬架执行机构、左后悬架执行机构和右后悬架执行机构;
所述左前车身高度传感器、右前车身高度传感器、左前悬架执行机构、右前悬架执行机构均与第一区域控制器信号连接,所述左后车身高度传感器、速度传感器、左后悬架执行机构均与第二区域控制器信号连接,所述右后车身高度传感器、加速度传感器、右后悬架执行机构均与第三区域控制器信号连接。
9.进一步地,所述第一区域控制器与摄像头、激光雷达信号连接,摄像头与激光雷达将所采集到的道路环境信息传输给第一区域控制器。
10.本发明还涉及一种分布式电控悬架控制系统的控制方法,采用上述的一种分布式电控悬架控制器系统;具体包括以下步骤:s1:各传感器采集车辆信息和道路环境信息;s2:传感器将采集的信息传输给就近的区域控制器;s3:区域控制器从车载网络获取车辆驾驶意图,各区域控制器根据车辆信息、道路环境信息以及车辆驾驶意图做出各自的悬架姿态调整指令;s4:各区域控制器之间通过车载网络对各自的悬架调整指令进行汇总并协同调整悬架姿态调整指令;s5:各区域控制器向就近的执行机构同步发送协同调整后的悬架姿态调整指令;s6:执行机构收到悬架姿态调整指令后同步调整对应的悬架。
11.进一步完善上述技术方案,所述车辆信息包括车身高度、车辆横向速度及加速度、车辆纵向速度及加速度、车身俯仰角、车身侧倾角、车身高度、油门踏板状态、制动踏板状态;所述道路环境信息包括前方车辆位置速度、道路平整度、道路坡度、道路宽度。
12.进一步地,所述车辆驾驶意图为车辆智能驾驶模块的车辆行驶规划和驾驶员意图预测或直接来自驾驶员的指令。
13.进一步地,所述悬架姿态调整指令包括对悬架刚度、阻尼和车身高度的调整。
14.相比现有技术,本发明具有如下有益效果:本发明的一种分布式电控悬架控制系统,取消了原有的独立电控悬架控制器,将电控悬架的控制算法和配套软件部署到各区域控制内,相关传感器和就近的区域控制器建立信号连接,执行机构也与就近的区域控制器建立信号连接;区域控制器做出悬架调整决策后通过车载网络进行汇总协调,再将悬架姿态调整指令同步发送给就近的执行机构,执行机构再根据收到的悬架姿态调整指令同步对悬架系统做出调整;这样,极大地缩短线束,实现了降低整车的线束成本和控制器成本。
附图说明
15.图1为实施例的一种分布式电控悬架控制系统的布置示意图;图2为实施例的一种分布式电控悬架控制系统的控制方法的逻辑框图;图3为按功能域划分、分布式的汽车电子电气架构图;图4为“中央计算 区域”架构的汽车电子电气架构图。
具体实施方式
16.下面结合附图对本发明的具体实施方式作进一步的详细说明。
17.请参见图1,具体实施例的一种分布式电控悬架控制系统,包括:车辆上用于获取车辆信息和道路环境信息的若干传感器,用于调整悬架系统的各执行结构;还包括设于车辆上的若干区域控制器,区域控制器信号连接一个或多个就近的传感器以及一个或多个就近的执行机构,所述若干区域控制器接入车载网络并通过车载网络实现区域控制器之间的通讯连接,各区域控制器内均部署有电控悬架的控制算法和配套软件,所述车载网络为can/lin/以太网总线。
18.实施例的一种分布式电控悬架控制系统,取消了原有的独立电控悬架控制器,将电控悬架的控制算法和配套软件部署到各区域控制内,相关传感器和就近的区域控制器建立信号连接,执行机构也与就近的区域控制器建立信号连接;区域控制器做出悬架调整决策后通过车载网络进行汇总协调,再将悬架姿态调整指令同步发送给就近的执行机构,执行机构再根据收到的悬架姿态调整指令同步对悬架系统做出调整;这样,极大地缩短线束,实现了降低整车的线束成本和控制器成本。
19.这里可以解释的是,以前汽车电子电气架构是按功能域划分的,而且是分布式的,请参见图3,比如有动力域、底盘域、车身域、驾驶域、座舱域等,每个域内又有多个控制器。以底盘域为例,有eps(电子转向锁控制器)、esp(电子稳定系统)、epbi(电子驻车控制器)、vmc(电控悬架控制器)等。以车身域为例,有bcm(车身控制器)、peps(无钥匙进入系统)、ac(自动空调控制器)等。随着技术的进步,汽车电子电气架构向“中央计算 区域
”ꢀ
架构演变,请参见图4,其中区域控制器按照就近原则接入相应的传感器、执行器,这些传感器、执行器是跨功能域的,可以包含车身、动力、底盘,打破了原有功能域的概念。
20.本发明是在“中央计算 区域
”ꢀ
架构的基础上,将电控悬架控制器取消,将其传感器、执行器接入区域控制器,故整车成本会降低,这自然也包括控制器成本。
21.请继续参见图1,其中,所述若干区域控制器包括第一区域控制器(图1中的区域控制器a)、第二区域控制器(图1中的区域控制器b)和第三区域控制器(图1中的区域控制器c),第一区域控制器位于车辆前部,第二区域控制器和第三区域控制器位于车辆后部且左右并排设置;所述若干传感器包括左前车身高度传感器、右前车身高度传感器、左前车身高度传感器、右后车身高度传感器、速度传感器和加速度传感器;所述执行机构包括左前悬架执行机构、右前悬架执行机构、左后悬架执行机构和右后悬架执行机构;所述左前车身高度传感器、右前车身高度传感器、左后悬架执行机构、右前悬架执行机构均与第一区域控制器信号连接,所述左后车身高度传感器、速度传感器、左后悬架执行机构均与第二区域控制器信号连接,所述右后车身高度传感器、加速度传感器、右后悬架执行机构均与第三区域控制器信号连接。
22.这样,进一步限定了传感器、执行机构相对应的就近的区域控制器,极大地缩短了线束长度,实现了控制器和线束成本降低。
23.请参见图2,本发明还提供一种分布式电控悬架控制系统的控制方法,采用上述的一种分布式电控悬架控制器系统;具体包括以下步骤:s1:传感器采集车辆信息和道路环境信息;s2:传感器将所述车辆信息和道路环境信息传输给就近的区域控制器;s3:区域控制器根据车辆信息、道路环境信息以及车辆驾驶意图做出悬架调整决策;
s4:区域控制器之间相互交流并协同调整悬架姿态调整指令;s5:区域控制器向就近的执行机构同步发送悬架姿态调整指令;s6:执行机构收到悬架姿态调整指令后同步调整悬架。
24.实施时,所述步骤s2包括:左前车身高度传感器、右前车身高度传感器将采集到的车辆信息和道路环境信息传输给第一区域控制器;左后车身高度传感器、速度传感器将采集到的车辆信息和道路环境信息传输给第二区域控制器;右后车身高度传感器、加速度传感器将采集到的车辆信息和道路环境信息传输给第三区域控制器。
25.所述步骤s3包括:第一区域控制器做出悬架调整决策并得到左前悬架和右前悬架的悬架姿态调整指令;第二区域控制器做出悬架调整决策并得到左后悬架的悬架姿态调整指令;第三区域控制器做出悬架调整决策并得到右后悬架的悬架姿态调整指令。
26.所述步骤s5包括:第一区域控制器将左前悬架的悬架姿态调整指令发送给左前悬架执行机构,将右前悬架的悬架姿态调整指令发送给右前悬架执行机构;第二区域控制器将左后悬架的悬架姿态调整指令发送给左后悬架执行机构;第三区域控制器将右后悬架的悬架姿态调整指令发送给右后悬架执行机构;上述发送指令的动作为各区域控制器通过车载网络同步发送给对应的执行机构。
27.其中,所述车辆信息包括车身高度、车辆横向速度及加速度、车辆纵向速度及加速度、车身俯仰角、车身侧倾角、车身高度、油门踏板状态、制动踏板状态;所述道路环境信息包括前方车辆位置速度、道路平整度、道路坡度、道路宽度。
28.实施时,与第一区域控制器信号连接的摄像头和激光雷达也会将采集到的道路环境信息传递给第一区域控制器,这些信息所包含的前方车辆位置速度、道路平整度、道路坡度、道路宽度等将成为电控悬架调整的重要判断依据,也会影响车辆的智能驾驶模块决策。
29.其中,所述车辆驾驶意图为车辆智能驾驶模块的车辆行驶规划和驾驶员意图预测或直接来自驾驶员的指令。
30.实施时,如果驾驶员不进行干涉,车辆的智能驾驶模块会将接下来一段时间内的行驶规划和驾驶员意图预测发送给各个区域控制器(包括第一区域控制器、第二区域控制器和第三区域控制器);如果驾驶员有干涉,则在智能模块所发送的车辆驾驶意图的基础上,车载网络会将直接来自驾驶员的指令发送给各个区域控制器。
31.其中,所述悬架姿态调整指令包括对悬架刚度、阻尼和车身高度的调整。
32.实施时,考虑到车辆在高速行驶或通过弯道等工况下的安全性,各个悬架调整的同步十分重要,因此有必要采取措施保证各个执行机构执行悬架姿态调整指令的同步性,本实施例提供一种可行的方式,可以理解的是,其他均能保证各个执行机构执行悬架姿态调整指令的同步性的方式也在本专利的保护范围内,例如在悬架姿态调整指令中加上时间
戳,执行机构统一设定为在一段确保所有执行机构都已收到悬架姿态调整指令的时间后再同步执行悬架姿态调整指令。
33.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
