led和半导体激光器芯片硅片输送装置控制方法及装置
技术领域
1.本发明涉及机械设备控制技术领域,特别涉及一种用于led和半导体激光器芯片分选机的硅片输送装置控制方法及硅片输送装置。
背景技术:
2.led和半导体激光器产业规模发展非常迅猛,市场潜力巨大,但是它的发展离不开led和半导体激光器装备业的发展作支撑。而led和半导体激光器行业又有它的特殊性,由于生产过程的原因,每个led和半导体激光器芯片都是独一无二的,在电子和光学特性上都有稍许不同,这就要求所有的led和半导体激光器芯片都要进行测试并根据其独特的特性进行分选。但led和半导体激光器芯片分选难度很大,主要原因是芯片尺寸一般都很小,尺寸在纳米级别,这样小的芯片需要微探针才能完成测试,分选过程需要精确的机械和图像识别系统,这使得分选设备的结构都非常庞杂,同时造价高昂,而且分选速度慢,分选效率低。
技术实现要素:
3.针对以上缺陷,本发明的目的是提供一种led和半导体激光器芯片硅片输送装置控制方法及装置,此led和半导体激光器芯片硅片输送装置控制方法及装置能够快速的完成硅片的输送任务,且装置结构简单,布局紧凑合理,能够有效的提升led和半导体激光器芯片的分选效率;同时造价低廉,有利于促进led和半导体激光器产业的技术水平和批量生产能力。
4.为了实现上述目的,本发明的技术方案是:一种led和半导体激光器芯片硅片输送装置控制方法,包括硅片送出步骤和空硅片取回步骤:所述硅片送出步骤包括如下步骤:s11、机械手从升降台上抓取硅片,硅片工作台作装载准备;s12、所述机械手拖动所述硅片并移动到所述硅片工作台上方;s13、所述机械手将所述硅片放到所述硅片工作台上;s14、所述硅片工作台装载所述硅片;所述硅片取回步骤包括如下步骤:s21、所述硅片工作台卸载空硅片,所述机械手从所述硅片工作台上抓取所述空硅片;s22、所述机械手拖动所述空硅片移动到所述升降台处;s23、所述机械手将所述空硅片送回所述升降台上。
5.其中,所述步骤s13包括如下步骤:机械手升降气缸的活塞杆伸出,机械手夹头下降,所述硅片落在硅片载板上;夹紧气缸的活塞杆缩回,上夹片与下夹片分开,松开所述硅片;所述机械手夹头在机械手电机的驱动下水平退出装卸载工位;所述机械手升降气缸的活塞杆缩回,所述机械手夹头上升复位。
6.其中,所述步骤s11的所述硅片工作台装载准备包括如下步骤:所述硅片工作台的移动组件将扩张器送至装卸载工位;推进器气缸的活塞杆伸出,推动升降电机座靠近托板,升降从动齿轮与传动齿轮啮合,升降电机转动,硅片载板升起,弹簧夹片张开;所述步骤s14包括如下步骤:所述升降电机反方向转动,所述硅片载板复位,所述弹簧夹片夹紧固定所述
硅片;所述推进器气缸的活塞杆缩回,在推进器拉簧的作用下所述升降电机座复位,所述升降从动齿轮与所述传动齿轮分开,完成所述硅片的装载。
7.其中,所述步骤s21包括如下步骤:推进器气缸的活塞杆伸出,推动升降电机座靠近托板,升降从动齿轮与传动齿轮啮合,升降电机转动,硅片载板升起,弹簧夹片张开;机械手升降气缸的活塞杆伸出,机械手夹头下降;机械手电机驱动所述机械手夹头水平移动,使得上夹片与下夹片分别位于所述空硅片的上下两侧;夹紧气缸的活塞杆伸出,所述上夹片与所述下夹片闭合抓取所述空硅片;所述机械手升降气缸的活塞杆缩回,所述机械手夹头上升复位;所述升降电机反方向转动,所述硅片载板复位,所述弹簧夹片复位;所述推进器气缸的所述活塞杆缩回,在推进器拉簧的作用下所述升降电机座复位,所述升降从动齿轮与所述传动齿轮分开,完成所述空硅片的卸载。
8.其中,还包括升降台控制步骤:所述升降台的托架升降电机转动,托架在所述托架升降电机的驱动下上升,将位于第一层的硅片送至所述机械手的抓取位,所述托架升降电机停止;待所述机械手将所述硅片取走后,所述升降台等待;待所述机械手将空硅片送回到第一层的空位内后,所述托架升降电机继续转动,将第二层的硅片送至所述机械手的抓取位;重复上述步骤,直至最末一层的空硅片被送回,所述托架升降电机反方向转动,所述托架在所述托架升降电机的驱动下回到初始位置。
9.一种用于实现上述的led和半导体激光器芯片硅片输送装置控制方法的led和半导体激光器芯片硅片输送装置,包括:升降台,所述升降台包括托架,和用于带动所述托架升降的动力箱,硅片通过硅片盒放置在所述托架上;硅片工作台,所述硅片工作台位于所述升降台的前侧,所述硅片工作台包括移动组件和由所述移动组件带动能够在x轴和y轴方向上移动的扩张器,所述扩张器包括用于承载所述硅片的硅片载板;机械手,所述机械手安装在所述硅片工作台的上方,所述机械手用于在所述升降台与所述硅片工作台之间输送所述硅片。
10.其中,所述托架包括底板,所述底板的左右两侧分别竖向设有第一侧板和第二侧板,所述第一侧板和所述第二侧板上均固定有第三侧板安装罩,第三侧板设有两块,分别滑动插装在两所述第三侧板安装罩内;所述底板的中部左右向设有底板滑槽,所述第二侧板包括连接为一体的水平板和竖板,所述水平板滑动插装在所述底板滑槽内;所述动力箱包括托架升降电机,所述托架升降电机的动力输出轴传动连接有竖向设置的丝杠,所述丝杠上螺纹连接有丝杠螺母,所述丝杠螺母固定连接有升降支架,所述升降支架与所述第一侧板固定连接。
11.其中,所述扩张器包括扩张器底座,所述扩张器底座的左端设有圆形通孔,所述圆形通孔的周侧设有多个滚动轴承,各所述滚动轴承传动连接有大同步带轮,所述大同步带轮上安装有环形的托板,所述托板上设有多个传动连接的升降同步带轮,位于所述托板前后两侧的各所述升降同步带轮的中部设有内螺纹柱,所述硅片载板的下侧设有与所述内螺纹柱螺纹配合的螺纹销;位于所述托板右侧的所述升降同步带轮的上方同轴设有传动齿轮;位于所述圆形通孔右侧的所述扩张器底座上设有能够绕固定轴转动的升降电机座,所述升降电机座上安装有升降电机,所述升降电机传动连接有升降从动齿轮,当所述升降电机座转动靠近所述托板时所述升降从动齿轮与所述传动齿轮啮合;所述升降电机座的右侧设有用于驱动所述升降电机座转动的推进器;所述扩张器底座上安装有回转电机,所述回
转电机传动连接有小同步带轮,所述小同步带轮与所述大同步带轮传动连接。
12.其中,所述推进器包括固定在所述扩张器底座上的固定座,所述固定座的一端安装有推进器气缸,所述推进器气缸的活塞杆位于缸体外的部位竖向连接有一推顶轴,所述活塞杆的端部与所述固定座的另一端之间安装有压簧;所述固定座的上部转动安装有楔形的导向块,所述推顶轴的上端位于所述导向块的斜边侧,当所述活塞杆伸出,所述推顶轴推动所述导向块向所述升降电机座方向转动,推动所述升降电机座靠近所述托板。
13.其中,所述机械手包括由机械手电机驱动的沿x轴方向滑动的机械手手臂,所述机械手手臂包括手臂滑动体,所述手臂滑动体上安装有机械手升降气缸,所述机械手升降气缸的动力部件连接有夹头支架,所述夹头支架上安装有机械手夹头;所述机械手夹头包括夹头主体,所述夹头主体上安装有夹紧气缸,所述夹紧气缸的动力部件连接有上夹片,所述夹头主体的下端安装有与所述上夹片相对的下夹片。
14.采用了上述技术方案后,本发明的有益效果是:由于本发明led和半导体激光器芯片硅片输送装置控制方法包括硅片送出步骤和空硅片取回步骤:硅片送出步骤包括机械手从升降台上抓取硅片的送到硅片工作台上,硅片工作台装载硅片;硅片取回步骤包括硅片工作台卸载空硅片,机械手从硅片工作台上抓取空硅片后将空硅片送回升降台上。本发明led和半导体激光器芯片硅片输送装置控制方法简便易行,全程自动化操作,无需人工干预,能够快速的完成led和半导体激光器芯片分选机的硅片输送任务,能够有效的提升led和半导体激光器芯片的分选效率,同时也有利于提升led和半导体激光器芯片产业的技术水平和批量生产能力。
15.由于本发明led和半导体激光器芯片硅片输送装置能够实现上述led和半导体激光器芯片硅片输送装置控制方法,从而本发明led和半导体激光器芯片硅片输送装置能够快速的完成led和半导体激光器芯片分选机的硅片输送任务,且结构简单,布局紧凑合理,能够有效的提升led和半导体激光器芯片的分选效率,同时造价低,有利于促进led和半导体激光器产业的技术水平和批量生产能力。
16.综上所述,本发明led和半导体激光器芯片硅片输送装置控制方法及装置解决了现有技术中led和半导体激光器芯片分选设备造价高、分选效率低等技术问题,本发明led和半导体激光器芯片硅片输送装置控制方法及装置能够提高led和半导体激光器芯片的分选效率,同时设备造价底,有利于提升led和半导体激光器芯片产业的技术水平和批量生产能力。
附图说明
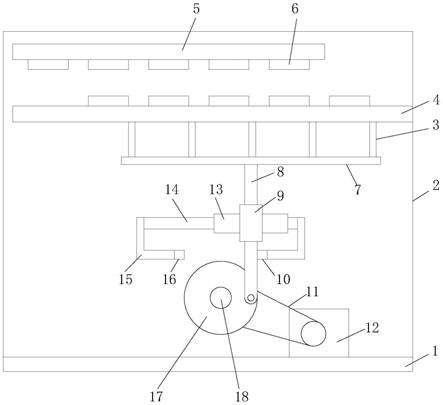
17.图1是本发明led和半导体激光器芯片硅片输送装置的结构示意图;图2是图1的俯视图;图3是图1中升降台的结构示意图;图4是图3中动力箱的内部结构示意图;图5是图4的仰视图;图6是图1中硅片工作台的结构示意图;图7是图6中移动组件的结构示意图;图8是图6中扩张器的结构示意图;
图9是扩张器升降动力装置沿图8中a-a线的剖面图;图10是图6中扩张器的结构示意图——不带硅片载板;图11是图10中推进器的结构示意图;图12是图1中机械手的结构示意图;图13是图12中机械手夹头的结构示意图;图14是图13的e-e线剖视图;图中:90、硅片盒,100、升降台,110、托架,112、底板,1120、底板滑槽,114、第一侧板,1140、第三侧板安装罩,116、第二侧板,1160、竖板,1162、水平板,118、第四侧板,120、第三侧板,1200、遮挡部,1222、滑动调节部,130、升降支架,1300、升降支架连接部,140、动力箱,142、箱体,1420、滑孔,150、托架升降电机,152、托架升降主动同步带轮,154、托架升降从动同步带轮,156、托架升降同步带,160、丝杠,162、丝杠螺母,170、导向杆,172、直线轴承,180、硅片盒检测开关,182、硅片传感器,190、动力箱定位销,200、机械手,202、机械手支架,204、机械手电机,206、机械手主动同步带轮,208、机械手从动同步带轮,210、机械手同步带,212、机械手导轨,214、机械手手臂,2140、手臂滑动体,2142、机械手升降气缸,2144、夹头支架,2146、拉簧下固定轴,2148、拉簧上固定轴,2150、机械手拉簧,2152、连接板,216、机械手夹头,2160、下夹片,2162、上夹片,2164、橡胶条,2166、夹紧气缸,2168、夹头主体,2170、滑动架,2172、复位弹簧,2174,安装板,2176、滑动架导轨,300、硅片工作台,310、移动组件,312、移动组件底座,320、x轴直线电机,322、y轴直线电机,330、x轴导轨,332、x轴拖链,334、y轴导轨,336、y轴拖链,340、y轴安装板,341、拖链支架,342、x轴拖链支架,344、y轴拖链支架,346、扩张器安装板,350、扩张器,352、扩张器底座,353、硅片载板,354、弹簧夹片,355、弹簧夹片安装座,356、托板,357、锁紧槽,360、升降同步带轮,361、升降同步带,362、滚动轴承,363、内螺纹柱,370、升降电机,371、升降电机座,3710、锁紧头,372、固定轴,373、传动件,374、第一伞齿轮,375、第二伞齿轮,376、升降传动轴,377、升降主动齿轮,378、升降从动齿轮,379、传动齿轮,380、推进器,3800、固定座,3802、推进器气缸,3804、活塞杆,3806、推顶轴,3810、导向块,3820、压簧,381、推进器拉簧,382、回转电机,383、回转主动同步带轮,384、回转从动同步带轮,385、第一同步带,386、拉簧安装螺栓,387、小同步带轮,388、第二同步带,389、大同步带轮,390、导向轮,391、偏心板。
具体实施方式
18.下面结合附图和实施例,进一步阐述本发明。
19.本说明书中涉及到的方位均以附图所示方位为准,仅代表相对的位置关系,不代表绝对的位置关系。
20.实施例一:如图1所示,一种led和半导体激光器芯片硅片输送装置控制方法,包括初始步骤、升降台控制步骤、硅片送出步骤和空硅片取回步骤,能够快速的完成led和半导体激光器芯片分选机的硅片输送任务。
21.初始步骤:如图1所示,由人工将载有硅片的硅片盒90放置到升降台100上,图中所示硅片盒90内未放入硅片,硅片为圆盘形结构,其盘膜上承载有待分选的led或半导体激光器芯片,
然后设备上电,各部件均位于初始位置。
22.升降台控制步骤:如图1、图3、图4和图5共同所示,当人工将硅片盒90放置到托架110上时,硅片盒检测开关180发出信号,本实施方式中一个硅片盒90可装载十二片硅片,机械手200按照顺序由上向下,或者由下向上进行抓取。如机械手200按照由上向下的顺序进行抓取,升降台100的托架升降电机150转动,托架110在托架升降电机150的驱动下上升,将位于硅片盒90内的上数第一层的硅片送至机械手200的抓取位(即机械手200的抓取高度),托架升降电机150停止。机械手200将硅片取走,升降台100等待,待机械手200将空硅片送回到硅片盒90的上数第一层空位内后,托架升降电机150继续转动,将上数第二层的硅片送至机械手200的抓取位,然后再停机等待,待机械手200将第二片空硅片送回后再将第三层的硅片送到机械手200的抓取位
……
。重复上述步骤直至硅片传感器182检测到最后一片空硅片被送回到硅片盒90内,由人工取走硅片盒90,硅片盒检测开关180发出信号,托架升降电机150反方向转动,托架110在托架升降电机150的驱动下回到初始位置。
23.硅片的送出步骤:如图1所示,包括如下步骤:s11、机械手200从升降台100上抓取硅片,硅片工作台300作装载准备;s12、机械手200拖动硅片并移动到硅片工作台300上方;s13、机械手200将硅片放到硅片工作台300上;s14、硅片工作台300装载硅片。
24.具体步骤如下:如图12和图14共同所示,在步骤s11中,机械手电机204驱动机械手手臂214向后水平滑动至抓取位,机械手夹头216的上夹片2162与下夹片2160分别插到硅片的上下两侧,夹紧气缸2166的活塞杆伸出,将上夹片2162下压,上夹片2162带动滑动架2170一同下降,上夹片2162与下夹片2160闭合,共同将硅片夹住。
25.如图6、图7、图8、图9、图10和图11共同所示,在步骤s11中,硅片工作台装载准备包括如下步骤:硅片工作台300的移动组件310将扩张器350送至装卸载工位,移动组件310的x轴直线电机320和y轴直线电机322共同动作,将扩张器350送至装卸载工位。推进器气缸3802的活塞杆3804伸出,安装在活塞杆3804上的推顶轴3806推动导向块3810向升降电机座371靠近,导向块3810推动升降电机座371靠近托板356,位于升降电机座371上的升降从动齿轮378与位于托板356上的传动齿轮379啮合。升降电机370转动,升降电机370的动力通过传动件373、第一伞齿轮374、第二伞齿轮375、升降传动轴376、升降主动齿轮377、升降从动齿轮378传递给传动齿轮379,传动齿轮379带动与其同轴的升降同步带轮360转动,升降同步带361将动力传递给其它各升降同步带轮360,安装在硅片载板353下侧面的四个螺纹销与设有内螺纹柱363的四个升降同步带轮360螺纹连接,随着各升降同步带轮360的转动,螺纹销从内螺纹柱363中旋出,带动硅片载板353升起,弹簧夹片354张开。
26.如图1和图12共同所示,在步骤s12中,机械手电机204反转,驱动机械手手臂214向前滑动,将硅片拖到硅片工作台300的上方。
27.如图1、图8、图12和图14共同所示,步骤s13包括如下步骤:
机械手升降气缸2142的活塞杆伸出,驱动连接板2152带动夹头支架2144下降,从而带动机械手夹头216下降,硅片落在硅片载板353上。夹紧气缸2166的活塞杆缩回,在复位弹簧2172的辅助作用下,滑动架2170带动上夹片2162上升与下夹片2160分开,将硅片放到硅片载板353上。机械手夹头216在机械手电机204的驱动下向前水平退出,而后机械手升降气缸2142的活塞杆缩回,机械手夹头216上升复位。
28.如图8、图9、图10和图11共同所示,步骤s14包括如下步骤:升降电机370反方向转动,硅片载板353下降复位,弹簧夹片354扣合在硅片上,将硅片夹紧固定在硅片载板353上。推进器气缸3802的活塞杆3804缩回,在压簧3820的辅助作用下推顶轴3806退回撤去对导向块3810的推力,在推进器拉簧381的作用下升降电机座371复位,升降从动齿轮378与传动齿轮379分开,完成硅片的装载。
29.空硅片的取回步骤:如图1所示,包括如下步骤:s21、硅片工作台300卸载空硅片,机械手200从硅片工作台300上抓取空硅片;s22、机械手200拖动空硅片移动到升降台100处;s23、机械手200将空硅片送回升降台100上。
30.具体步骤如下:如图6、图8、图10、图11、图12和图14共同所示,步骤s21包括如下步骤:移动组件310驱动扩张器350移动至装卸载工位,推进器气缸3802的活塞杆3804伸出,推动升降电机座371靠近托板356,升降从动齿轮378与传动齿轮379啮合,升降电机370转动,硅片载板353上升,弹簧夹片354张开。机械手升降气缸2142的活塞杆伸出,机械手夹头216下降,机械手电机204驱动机械手夹头216水平移动,使得上夹片2162与下夹片2160分别位于空硅片的上下两侧。夹紧气缸2166的活塞杆伸出,上夹片2162与下夹片2160闭合抓取空硅片。机械手升降气缸2142的活塞杆缩回,机械手夹头216上升复位,完成空硅片的卸载。此时如还有硅片待装载,硅片载板353则保持高位等待,若没有硅片待装载,则升降电机370反方向转动,硅片载板353下降复位,弹簧夹片354复位。推进器气缸3802的活塞杆3804缩回,在推进器拉簧381的作用下升降电机座371复位,升降从动齿轮378与传动齿轮379分开。
31.如图1和图12共同所示,在步骤s22中,机械手电机204驱动机械手手臂214向后滑动到升降台100的位置。
32.如图1、图12和图14共同所示,在步骤s23中,机械手电机204驱动机械手夹头216将空硅片插入到升降台100的空位内,夹紧气缸2166的活塞杆缩回,在复位弹簧2172的辅助作用下,上夹片2162与下夹片2160分开,将硅片放到升降台100内,机械手电机204驱动机械手夹头216向前水平退出。
33.实施例二:如图1和图2共同所示,一种用于实现实施例一所述led和半导体激光器芯片硅片输送装置控制方法的led和半导体激光器芯片硅片输送装置,包括升降台100、硅片工作台300和机械手200。
34.如图1和图3共同所示,升降台100包括托架110,和用于带动托架110升降的动力箱140,载有待分选芯片的硅片通过硅片盒90放置在托架110上。
35.如图3所示,托架110包括底板112,底板112的左右两侧分别竖向设有第一侧板114和第二侧板116,前侧竖向设有第四侧板118。第一侧板114和第二侧板116相对的侧面均固定有第三侧板安装罩1140,第三侧板120设有两块,分别滑动插装在两第三侧板安装罩1140内。两第三侧板120结构相同,相对设置,第三侧板120包括垂直连接的滑动调节部1222和遮挡部1200,滑动调节部1222插装在第三侧板安装罩1140内,滑动调节部1222与第三侧板安装罩1140上均设有延伸方向相同的腰孔,通过紧固件固定,通过腰孔可调节滑动调节部1222插装的深度,从而调节第三侧板120与第四侧板118之间的尺寸。底板112的中部左右向设有底板滑槽1120,第二侧板116包括连接为一体的水平板1162和竖板1160,水平板1162滑动插装在底板滑槽1120内,同样通过腰孔与紧固件固定,通过腰孔可调节水平板1162插入底板滑槽1120的位置,从而调节第一侧板114与第二侧板116之间的尺寸。托架110的前后、左右尺寸均可根据实际需要进行调整,从而能够适应不同尺寸硅片盒的要求,通用性更强。
36.如图3所示,底板112上安装有硅片盒检测开关180,用于检测硅片盒90是否放入托架110内。第四侧板118上安装有硅片传感器182,用于检测机械手200是否取出或送回硅片。
37.如图3、图4和图5共同所示,动力箱140包括箱体142,箱体142靠近托架110的一侧设有竖向延伸的两个滑孔1420,箱体142的底部设有动力箱定位销190,用于与机架(图中未示出)上的定位孔相配合。箱体142内安装有托架升降电机150,托架升降电机150的动力输出轴通过第一传动机构连接有竖向设置的丝杠160,丝杠160的两端通过轴承分别安装在箱体142的顶部和底部,丝杠160上螺纹连接有丝杠螺母162。位于丝杠160两侧的箱体142内各竖向安装有一根导向杆170,两导向杆170上均套设有直线轴承172。丝杠螺母162固定连接有升降支架130,升降支架130的两端分别与两直线轴承172固定连接,升降支架130上连接有两个升降支架连接部1300,两个升降支架连接部1300分别从两个滑孔1420处伸出箱体142,并与第一侧板114固定连接。
38.如图3、图4和图5共同所示,第一传动机构包括安装在托架升降电机150的动力输出轴上的托架升降主动同步带轮152,托架升降主动同步带轮152通过托架升降同步带156传动连接有托架升降从动同步带轮154,托架升降从动同步带轮154安装在丝杠160上,从而将托架升降电机150的动力传递给丝杠160,实现托架110的升降运动。
39.如图1、图6和图8共同所示,硅片工作台300安装在升降台100的前侧。硅片工作台300包括移动组件310和由移动组件310带动能够在x轴和y轴方向上移动的扩张器350,扩张器350上设有用于承载硅片的硅片载板353。
40.如图6和图7共同所示,移动组件310包括移动组件底座312,移动组件底座312上安装有x轴直线电机320,位于x轴直线电机320两侧的移动组件底座312上各安装有一条x轴导轨330,x轴直线电机320的滑动部件上固定有y轴安装板340,y轴安装板340同时与两x轴导轨330上的滑块固定连接。y轴安装板340上安装有y轴直线电机322,位于y轴直线电机322两侧的y轴安装板340上各安装有一条y轴导轨334,y轴直线电机322的滑动部件上固定有扩张器安装板346,扩张器安装板346同时与两y轴导轨334上的滑块固定连接。移动组件底座312的右侧部连接有x轴拖链支架342,y轴安装板340的前侧和右侧连接有拖链支架341,扩张器安装板346的前侧连接有y轴拖链支架344,x轴拖链支架342与拖链支架341之间连接有x轴拖链332,y轴拖链支架344与拖链支架341之间连接有y轴拖链336。移动组件310采用直线电机驱动,并采用金属光栅及编码器做位置反馈,不但抗干扰能力强,而且使得高速定位精度
小于
±
0.5微米,从而能够达到分选5mil*5mil的技术要求。
41.如图6、图7、图8和图10共同所示,扩张器350用于承载硅片的部位为环形结构,包括固定在扩张器安装板346上的扩张器底座352,扩张器底座352的左端设有圆形通孔,位于圆形通孔周侧的扩张器底座352上设有多个滚动轴承362,本实施方式优选滚动轴承362共设有四个,四个滚动轴承362沿圆形通孔的周侧等间距设置。各滚动轴承362共同传动连接有一大同步带轮389,大同步带轮389环绕在各滚动轴承362的外侧。大同步带轮389上安装有环形的托板356,托板356上设有多个升降同步带轮360,本实施方式优选升降同步带轮360共设有六个,六个升降同步带轮360等间距设置,托板356的前后两侧各设有两个,托板356的左右两侧各设有一个,六个升降同步带轮360通过升降同步带361传动连接。位于托板356前后两侧的四个升降同步带轮360的中心部固定有内螺纹柱363,内螺纹柱363随同升降同步带轮360一同转动,托板356的上方设有环形的硅片载板353,硅片载板353的下侧对应四个内螺纹柱363的位置各固定设有一螺纹销(图中未示出),四个螺纹销分别与四个内螺纹柱363螺纹配合,当升降同步带轮360转动时,螺纹销在内螺纹柱363内上下移动,从而实现硅片载板353的升降。位于托板356右侧的升降同步带轮360的上方同轴设有传动齿轮379。托板356的左右两侧各设有一弹簧夹片安装座355,两弹簧夹片安装座355上各铰接安装有一弹簧夹片354,弹簧夹片354用于夹紧硅片。两弹簧夹片安装座355为门形结构,分别跨设在两升降同步带轮360的上方,当硅片载板353升起时,能够将弹簧夹片354顶起张开;当硅片载板353落下时,弹簧夹片354在弹力作用下自动复位,将硅片夹持固定在硅片载板353上。
42.如图8、图9和图10共同所示,位于圆形通孔右侧的扩张器底座352上竖向安装有一固定轴372,固定轴372上转动安装有升降电机座371,升降电机座371可绕固定轴372转动。升降电机座371上安装有升降电机370及用于将升降电机370的动力传递给传动齿轮379的第二传动机构。第二传动机构包括与升降电机370的动力输出轴连接的传动件373,传动件373的输出轴上安装有第一伞齿轮374,第一伞齿轮374啮合有第二伞齿轮375,第二伞齿轮375通过升降传动轴376传动连接有升降主动齿轮377,升降主动齿轮377啮合有升降从动齿轮378,即升降电机370传动连接有升降从动齿轮378。当升降电机座371靠近托板356时,升降从动齿轮378与传动齿轮379啮合,将升降电机370的动力传递给传动齿轮379。
43.如图8、图10和图11共同所示,位于升降电机座371右侧的扩张器底座352上安装有推进器380,推进器380用于驱动升降电机座371转动。推进器380包括固定在扩张器底座352上的固定座3800,固定座3800的一端安装有推进器气缸3802,推进器气缸3802的活塞杆3804水平伸出,活塞杆3804位于缸体外的部位竖向连接有一推顶轴3806,活塞杆3804的端部与固定座3800的另一端之间安装有压簧3820。固定座3800的上部转动安装有楔形的导向块3810,推顶轴3806的上端位于导向块3810的斜边侧,当推进器气缸3802动作,活塞杆3804伸出,推顶轴3806推动导向块3810向升降电机座371方向转动,导向块3810推动升降电机座371靠近托板356。升降电机座371的端部设有凸起的锁紧头3710,托板356上设有与锁紧头3710相配合的锁紧槽357,当升降电机座371靠近托板356时,锁紧头3710卡在锁紧槽357内,升降从动齿轮378与传动齿轮379啮合。固定座3800和升降电机座371上各安装有一拉簧安装螺栓386,两拉簧安装螺栓386之间连接有推进器拉簧381,当活塞杆3804缩回时,推进器拉簧381辅助拉动升降电机座371复位脱离托板356,升降从动齿轮378与传动齿轮379分离。
44.如图8和图10共同所示,扩张器底座352上还安装有回转电机382,回转电机382的动力输出轴上安装有回转主动同步带轮383,回转主动同步带轮383通过第一同步带385传动连接有回转从动同步带轮384,回转从动同步带轮384同轴连接有小同步带轮387,即回转电机382传动连接小同步带轮387,小同步带轮387通过第二同步带388与大同步带轮389传动连接。位于大同步带轮389与小同步带轮387之间的扩张器底座352上安装有两个导向轮390,两导向轮390均位于第二同步带388的外侧,给第二同步带388起导向作用。两导向轮390中的一个导向轮390通过偏心板391安装在扩张器底座352上,偏心板391上设有弧形腰孔,扩张器底座352上呈弧形排列有多个螺栓孔,偏心板391通过螺栓穿过弧形腰孔与某一个或两个螺栓孔固定在扩张器底座352上,可通过改变螺栓穿过的弧形腰孔或螺栓孔的位置改变偏心板391的位置,从而改变该导向轮390的位置,进而能够调节第二同步带388的张紧度。
45.如图1 所示,机械手200安装在硅片工作台300的上方,机械手200用于将载有待分选芯片的硅片由硅片盒90内取出,并放置到硅片载板353(参见图8)上,以及将硅片载板353上的已分选后的空硅片再放回到硅片盒90内,从而完成硅片在升降台100与硅片工作台300之间的输送。
46.如图12所示,机械手200包括机械手支架202,机械手支架202的两端部分别安装有机械手主动同步带轮206和机械手从动同步带轮208,机械手主动同步带轮206与机械手从动同步带轮208通过机械手同步带210传动连接,机械手主动同步带轮206传动连接机械手电机204的动力输出轴。位于机械手同步带210侧部的机械手支架202上安装有机械手导轨212,机械手导轨212与机械手同步带210平行设置。机械手同步带210上固定有机械手手臂214,机械手手臂214还与机械手导轨212的滑块固定连接,从而机械手电机204能够驱动机械手手臂214沿前后方向滑动。
47.如图12所示,机械手手臂214包括手臂滑动体2140,手臂滑动体2140的一端与机械手同步带210和机械手导轨212的滑块固定连接,手臂滑动体2140的另一端安装有机械手升降气缸2142,机械手升降气缸2142的动力部件通过连接板2152连接有夹头支架2144,夹头支架2144的端部安装有机械手夹头216。手臂滑动体2140上水平安装有拉簧上固定轴2148,连接板2152上水平安装有拉簧下固定轴2146,拉簧上固定轴2148与拉簧下固定轴2146之间安装有机械手拉簧2150,当机械手升降气缸2142的动力部件缩回时,机械手拉簧2150用于辅助夹头支架2144复位,从而辅助机械手夹头216复位。
48.如图12、图13和图14共同所示,机械手夹头216包括夹头主体2168,夹头主体2168上方固定有用于与夹头支架2144相固定的安装板2174。夹头主体2168的下侧安装有夹紧气缸2166,夹紧气缸2166的动力部件连接有上夹片2162,上夹片2162上安装有滑动架2170,滑动架2170与夹头主体2168之间安装有复位弹簧2172,夹头主体2168上竖向安装有滑动架导轨2176,滑动架2170与滑动架导轨2176的滑块固定连接,起导向作用。夹头主体2168的下端安装有下夹片2160,下夹片2160与上夹片2162相对设置,当夹紧气缸2166动作将上夹片2162推下时,上夹片2162与下夹片2160共同完成硅片的夹取。上夹片2162的夹持部位安装有橡胶条2164,橡胶条2164可对硅片起到保护作用,同时还能起到增加摩擦力的作用,提高夹持的稳定性。
49.需要说明的是,本发明中各部件的动作均有传感器或限位开关信号来作为动作的
起止标志,全程由工控机及控制器(图中未示出)配合自动完成,无需人为干预,因传感器和限位开关检测技术为本领域常规技术手段,本领域技术人员根据上述阐述不需要付出创造性劳动即可完成传感器或限位开关的设置,故有关各传感器和限位开关的具体安装位置及作用原理在此不再详述。
50.本发明led和半导体激光器芯片硅片输送装置控制方法及装置能够快速的完成硅片的输送任务,且装置结构简单,布局紧凑合理,能够有效的提升led和半导体激光器芯片的分选效率;同时造价低,有利于促进led和半导体激光器产业的技术水平和批量生产能力。
51.本发明不局限于上述具体的实施方式,本领域的普通技术人员从上述构思出发,不经过创造性的劳动,所做出的种种变换,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。