1.本发明涉及物流仓储领域,尤其涉及一种用于仓储管理和货架搬运的并且能实现四向自动行驶的穿梭车及自动化仓储装置。
背景技术:
2.随着仓储物流业的快速发展,对立体仓库空间的利用率提出了越来越高的要求,希望立体仓库平面上布置更多的货架,高度方向上布置更多的货架隔层,最大限度减少进货、卸货通道占据的空间。
3.现有立体库结构更多采用一条进货卸货巷道与多条与其垂直相连存货架巷道的模式,这就要求穿梭车必须可以纵向、横向两个互相垂直的方向行走。现有技术中,立体仓库通常使用子母车系统,即母车承载着子车在进货、卸货巷道行走,然后子车从与母车行走方向相垂直的方向驶出,进入货架巷道,之后再原路回到母车上,最后再由母车带走。采用子母车两台穿梭车组合的方式,不仅子母车本身占据了相当大的空间,减少货架及隔层的数量,降低了立体库的空间利用率,还增加了制造、采购及维护成本。
4.目前市场上用于密集仓储管理和货架搬运的穿梭车非常少,已有的一些产品存在各种各样的问题,例如穿梭车重量过大、体积过大、灵活度不够,运行能力较差、货架存取效率低下、载重能力不够、稳定性不够、液压装置泄漏等等。
技术实现要素:
5.本发明的一个目的在于提供一种成本较低的结构紧凑的四向行驶的穿梭车。
6.本发明的另一个目的在于提供一种成本较低的占用空间小的自动化仓储装置。
7.为实现上述发明目的,本发明提供了一种四向行驶的穿梭车,包括:
8.机架;
9.行走驱动模块,支撑在所述机架上,用于带动所述机架沿着横向以及纵向行走;
10.换向模块,支撑在所述机架上,用于切换所述机架沿横向或者纵向行走;
11.控制模块,连接所述行走驱动模块和换向模块,用于控制所述行走驱动模块和换向模块的运行;
12.供电模块,给所述控制模块、行走驱动模块和换向模块提供能量;
13.所述行走驱动模块包括行走驱动电机、横向轮组以及纵向轮组,所述行走驱动电机通过第一传动机构驱动所述横向轮组,所述行走驱动电机通过第二传动机构驱动所述纵向轮组,所述换向模块包括换向电机以及由换向电机带动的第三传动机构,所述第三传动机构与所述纵向轮组连接,所述换向电机通过所述第三传动机构带动所述纵向轮组上下运动实现所述机架沿横向或者纵向行走的切换。
14.作为本发明一实施方式的进一步改进,所述行走驱动模块还包括连接所述驱动电机的减速器,所述减速器具有相互垂直的第一输出端和第二输出端,所述第一输出端和第二输出端分别连接所述第一传动机构和第二传动机构。
15.作为本发明一实施方式的进一步改进,所述横向轮组包括安装于所述机架上的第一驱动轮和第一从动轮,所述第一传动机构包括第一带/链条传动机构以及驱动轴,所述第一带/链条传动机构的输入端连接于所述第一输出端,所述第一带/链条传动机构的输出端连接于所述驱动轴,所述第一带/链条传动机构通过所述驱动轴将旋转动力传递给所述第一驱动轮。
16.作为本发明一实施方式的进一步改进,所述换向模块还包括活动支撑在所述机架上的顶升架,所述纵向轮组安装于所所述换向模块还包括活动支撑在所述机架上的顶升架,所述纵向轮组安装于所述顶升架上,所述换向电机通过第三传动机构带动所述顶升架上下移动。
17.作为本发明一实施方式的进一步改进,所述顶升架上设有滑块,所述机架上设有导柱固定板,所述滑块沿着所述导柱固定板上下移动。
18.作为本发明一实施方式的进一步改进,所述顶升架上设有滑柱,所述机架上设有套筒,所述滑柱沿着套筒上下移动。
19.作为本发明一实施方式的进一步改进,所述纵向轮组包括安装于所述顶升架上的第二驱动轮和第二从动轮,所述第二传动机构包括第二带/链条传动机构以及顶升轴,所述第二带/链条传动机构的输入端连接于所述第二输出端,所述第二带/链条传动机构的输出端连接于所述顶升轴,所述第二带/链条传动机构通过顶升轴将旋转动力传递给所述第二驱动轮。
20.作为本发明一实施方式的进一步改进,所述机架上连接有张紧轮,所述第二带传动机构包括连接所述第二输出端的第二主动带轮、由第二主动带轮驱动的第二从动带轮以及由第二主动带轮和第二从动带轮驱动的第二传动带,所述第二从动带轮套设在所述顶升轴上并带动顶升轴旋转,所述第二传动带基于所述第二从动带轮的上升而张紧,所述第二从动带轮下降使得所述第二传动带与所述张紧轮接触而张紧。
21.作为本发明一实施方式的进一步改进,所述第三传动机构包括连接所述换向电机的换向轴以及连接换向轴的双连杆联动机构,所述双连杆联动机构将所述换向轴的旋转运动转化为所述顶升架的上下运动。
22.作为本发明一实施方式的进一步改进,所述第三传动机构包括连接换向电机的换向轴以及连接换向轴的曲柄摇杆机构,所述曲柄摇杆机构将换向轴的旋转运动转化为顶升架的上下运动。
23.作为本发明一实施方式的进一步改进,所述曲柄摇杆机构设置两个,分别位于所述机的两侧,每个曲柄摇杆机构包括安装于机架上的顶升换向齿轮箱以及自顶升换向齿轮箱的两端分别伸出的偏心轴,所述偏心轴插入到顶升架上的长槽内,所述偏心轴的旋转带动所述顶升架上下移动。
24.作为本发明一实施方式的进一步改进,所述双连杆联动机构设置两个,分别位于所述机架横向的两侧,每个双连杆联动机构包括沿支撑件纵向间隔设置的两个机架、活动于连接机架上的三角块、连接连两个三角块的一对连杆以及连接在所述机架上的偏心组件,所述顶升架连接于所述偏心组件上,所述换向轴带动所述三角块摇摆,所述三角块通过所述偏心组件带动所述顶升架。
25.作为本发明一实施方式的进一步改进,所述偏心组件包括偏心轮、偏心轮连接轴
承、偏心块以及偏心支撑轴,所述偏心轮与所述三角块传动连接,所述偏心轮连接轴承支撑在所述偏心轮和偏心块之间,所述偏心块通过所述偏心支撑轴支撑在所述机架上。
26.作为本发明一实施方式的进一步改进,所述换向电机沿两个方向的旋转能够带动所述顶升架在三个位置之间转换,在低位位置,所述穿梭车沿第一方向运动;在中间位置,所述穿梭车沿垂直于第一方向的第二方向运动;在高位位置,所述顶升架上升到高位以进行顶升货物。
27.本发明还提供一种自动化仓储装置,该自动化仓储装置包括如上所述的四向行驶的穿梭车。
28.本发明提供的穿梭车,穿梭车可纵、横四向行驶,采用一台四向穿梭车代替子母车组合系统,提高了空间利用率,也提高了货物的存取效率;采用机械结构,解决液压装置的泄露问题,并且提高了穿梭车的灵活度;采用单边4个轮子及强化的机架,提高了四向穿梭车的载重能力和通过能力;将货架的举升动力与四向穿梭车的换向动力合二为一,既节约了成本,又减少了空间,极大降低四向穿梭车的外形尺寸。
附图说明
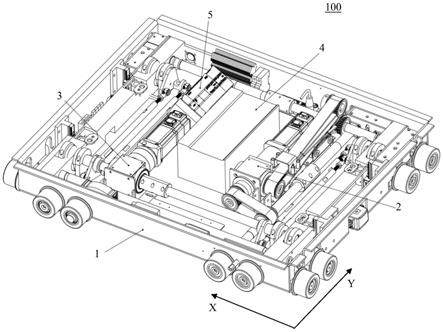
29.图1是本发明一实施方式中四向行驶的穿梭车的结构示意图;
30.图2是图1中穿梭车的机架的结构示意图;
31.图3是图1中穿梭车的行走驱动模块的结构示意图;
32.图4是图1中穿梭车的换向模块的结构示意图;
33.图5是图4中换向模块的双连杆联动机构的结构示意图;
34.图6是本发明另一实施方式中四向行驶的穿梭车的结构示意图;
35.图7是图6中穿梭车的行走驱动模块的结构示意图;
36.图8是图7中穿梭车的行走驱动模块的横向驱动的结构示意图;
37.图9是图7中穿梭车的行走驱动模块的纵向驱动的结构示意图;
38.图10是图6中穿梭车的换向模块的结构示意图;
39.图11是图10中换向模块的曲柄摇杆机构的结构示意图。
具体实施方式
40.以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
41.应该理解,本文使用的例如“上”、“上方”、“下”、“下方”、“横向”、“纵向”等表示空间相对位置的术语是出于便于说明的目的来描述如附图中所示的一个单元或特征相对于另一个单元或特征的关系。空间相对位置的术语可以旨在包括设备在使用或工作中除了图中所示方位以外的不同方位。
42.如图1所示,本发明实施方式中的四向行驶的穿梭车100的结构示意图。四向行驶的穿梭车100包括机架1、行走驱动模块2、换向模块3、供电模块4、控制模块5以及外壳(图未示)。其中,行走驱动模块2支撑在机架1上,用于带动机架1沿着横向以及纵向行走,这里的横向和纵向仅用于区分大致垂直的两个方向,对具体的方向并不做限定,以图中箭头x方向
为横向或者左右方向,箭头y方向为纵向或者前后方向进行具体说明。换向模块3支撑在机架1上,用于切换机架1沿横向或者纵向行走;控制模块5连接行走驱动模块2和换向模块3,用于控制行走驱动模块2和换向模块3的运行;供电模块4给控制模块5、行走驱动模块2和换向模块3提供能量。供电模块可以是电池,如采用48v蓄电池进行供电,实用环保,蓄电池可灵活更换。机架1通过钣金折弯及局部加筋,连成一个整体,极大提高整车的承载能力。
43.参照图2和图3,行走驱动模块2包括横向轮组、纵向轮组以及用于带动横向轮组和纵向轮组的行走驱动电机203,行走驱动电机203通过第一传动机构驱动横向轮组,行走驱动电机203通过第二传动机构驱动纵向轮组,即穿梭车的纵、横两个方向的四向运动只需一个动力,既节约了成本,又减少了空间,极大降低小车的外形尺寸。
44.行走驱动模块还包括连接行走驱动电机203的十字减速器204或减速箱,十字减速器204具有相互垂直的第一输出端和第二输出端,第一输出端和第二输出端分别连接第一传动机构和第二传动机构,从而通过一个电机将速度和扭矩传递给两个传动机构,实现横向轮组和纵向轮组的运动。
45.具体的,横向轮组包括沿横向间隔设置的4个第一驱动轮201和4个第一从动轮202,4个第一驱动轮201和4个第一从动轮202均支撑在机架上,即第一驱动轮201、第一从动轮202分布在整车的两侧,其中,4个第一驱动轮201沿着纵向前后对称各设置2个、4个第一从动轮202沿着纵向前后对称各设置2个,驱动电机203和十字减速器204安装在驱动减速机机架205上,驱动减速机机架205固定在机架1上。第一驱动轮201包括相对于机架1的外侧第一驱动轮和内侧第一驱动轮,第一传动机构包括第一带传动机构、驱动轴209以及第一动力分配器214,第一带传动机构的输入端连接于第一输出端,第一带传动机构的输出端连接于驱动轴209,驱动轴209的两侧各连接一个内侧第一驱动轮,第一动力分配器214设置于驱动轴209和外侧第一驱动轮之间并将驱动轴209的旋转动力传递给外侧第一驱动轮,即两个第一动力分配器214固定在机架1的内部,前后两侧对称布置,分别与两个第一驱动轮201连接。其中,第一带传动机构包括连接十字减速器204第一输出端的第一传动带轮206、由第一传动带轮206带动的第二传动带轮207以及安装在第一传动带轮206和第二传动带轮207上的第一传动带208,第二传动带轮207套装在驱动轴209上以带动驱动轴209转动,驱动轴209可以是两段式构造,通过第一联轴器210进行连接,以使得传动更加平稳可靠。
46.参照图4所示,换向模块3包括换向电机304以及由换向电机304带动的第三传动机构,第三传动机构与纵向轮组连接,换向电机304通过第三传动机构带动纵向轮组上下运动实现机架1沿横向或者纵向行走的切换。换向电机304通过换向减速机305将旋转动力传递给第三传动机构,换向电机304和换向减速机305安装于换向减速机机架306上。换向模块3还包括活动支撑在机架1上的顶升架310,纵向轮组安装于顶升架310上,换向电机304通过第三传动机构带动顶升架310上下移动从而带动纵向轮组上下移动。
47.其中,纵向轮组包括安装于顶升架310上的沿纵向间隔设置的4个第二驱动轮301和4个第二从动轮302,4个第二驱动轮301沿着横向左右对称各设置2个,4个第二从动轮302沿着横向左右对称各设置2个。第二驱动轮包括相对于顶升架310的外侧第二驱动轮和内侧第二驱动轮,第二传动机构包括第二带传动机构、顶升轴312以及第二动力分配器303,第二带传动机构的输入端连接于十字减速器204第二输出端,第二带传动机构的输出端连接于顶升轴312,顶升轴312的两侧各连接一个外侧第二驱动轮,第二动力分配器303设置于顶升
轴312和内侧第二驱动轮之间并将顶升轴312的旋转动力传递给内侧第二驱动轮。顶升轴312可以由两段构成,通过第三联轴器313连接,使得顶升轴312的传动更加平稳可靠。
48.第二带传动机构包括第二主动带轮211、第二传动带212、第二从动带轮213,第二主动带轮211连接于十字减速器204第二输出端,即十字减速器204分别与第一传动带轮206、第三传动带轮211连接。第二从动带轮213由第二主动带轮211驱动,第二传动带212由第二主动带轮211和第二从动带轮213驱动,第二从动带轮211套设在顶升轴312上并带动顶升轴312旋转。机架1上连接有张紧轮216,第二传动带212基于第二从动带轮213的上升而张紧,第二从动带轮213下降使得第二传动带212与张紧轮216接触而张紧。
49.第三传动机构包括连接换向电机304的换向轴308以及连接换向轴308的双连杆联动机构309,双连杆联动机构309将换向轴308的旋转运动转化为顶升架310的上下运动。换向轴308可以由两段构成,通过第二联轴器307连接,使得换向轴308的传动更加平稳可靠。
50.参照图5所示,双连杆联动机构309设置两个,分别位于机架1横向的两侧,每个双连杆联动机构309包括沿机架1纵向间隔设置的两个机架3094、活动于连接机架3094上的三角块3093、连接连两个三角块3093的一对连杆3092以及连接在机架3094上的偏心组件,顶升架310连接于偏心组件上,换向轴308带动三角块3093摇摆,三角块3093通过偏心组件带动顶升架310。
51.偏心组件包括偏心轮3095、偏心轮连接轴承3096、偏心块3097以及偏心支撑轴3098,偏心轮3095与三角块3093传动连接,偏心轮连接轴承3096支撑在偏心轮3095和偏心块3097之间,偏心块3097通过偏心支撑轴3098支撑在机架3094上,偏心支撑轴轴承3099支撑着偏心支撑轴3098的旋转。其中,连杆3092和三角块3093之间可以通过鱼眼接头3091连接,顶升架310支撑在偏心轮连接轴承3096的外圈,从而顶升架310能够随着偏心轮3095的转动实现顶升或下降。
52.顶升架310上设有滑块311,机架上设有导柱固定板215,滑块311沿着导柱固定板215上下移动。4个导柱固定板215固定在机架1的内部,左右两侧对称布置。
53.下面将详细说明穿梭车的运动过程。
54.驱动电机203运转,通过十字减速器204降速增扭后,速度和扭矩通过第一主动带轮206、第一传动带208、第一从动带轮207依次传递到驱动轴209,再结合第一联轴器210、第一动力分配器214,把速度和扭矩分别传递给前后的第一驱动轮201上,从而驱动整车进行左右运动。第一驱动轮201,既产生动力带动穿梭车进行移动,又起着支撑导向作用;第一从动轮202,主要起支撑导向作用。
55.十字减速器204有两个输出端,有2个动力传递路径,分别将速度与扭矩传递给第一主动带轮206、第二主动带轮211。另外一路动力,通过第二主动带轮211、第二传动带212、第二从动带轮213将速度与扭矩传递给顶升轴312。
56.第二驱动轮301、第二从动轮302分布在整车的左右两侧,固定在顶升架310上。4个滑块311分别与4个导柱固定板215、两个顶升架310连接。换向电机304与换向减速机305直接连接,通过换向减速机机架306固定在机架1上。偏心轮连接轴承3096卡在顶升架310上。
57.换向电机304运转,通过换向减速机305降速增扭后,速度和扭矩通过第二联轴器307、换向轴308传递到双连杆联动机构309。双连杆联动机构309,通过鱼眼接头3091、连杆3092、三角块3093的左右摇摆,可以带动偏心轮3095、偏心轮连接轴承3096、偏心块3097、偏
心支撑轴3098一起围绕偏心轮机架3094及偏心支撑轴轴承3099旋转,偏心支撑轴轴承3099支撑着偏心支撑轴3098的旋转。
58.双连杆联动机构309动作后,偏心轮3095、偏心块3097与偏心轮连接轴承3096一起旋转,偏心轮连接轴承3096的轴承外圈卡住顶升架310,并且带动顶升架310、第二驱动轮301、第二从动轮302一起沿着滑块311实现顶升或下降,最终实现货架的顶升或下降。
59.换向电机304正转,带动双连杆联动机构309动作,导致顶升架310、第二驱动轮301、第二从动轮302一起沿着滑块311下降,第二驱动轮301、第二从动轮302一起着地,第一驱动轮201、第一从动轮202一起悬空。驱动电机203的速度与扭矩,通过第二主动带轮211、第二传动带212、第二从动带轮213、顶升轴312、第三联轴器313、第二动力分配器303传递给4个第二驱动轮301,驱动整车进行前后运动。第二驱动轮301,既产生动力带动穿梭车进行移动,又起着支撑导向作用;第二从动轮302,主要起支撑导向作用。
60.换向电机304反转,带动双连杆联动机构309动作,导致顶升架310、第二驱动轮301、第二从动轮302一起沿着滑块311顶升,第二驱动轮301、第二从动轮302一起悬空,第一驱动轮201、第一从动轮202一起着地。驱动电机203的速度与扭矩,通过第一主动带轮206、第一传动带208、第一从动带轮207依次传递到第一驱动轮201,驱动整车进行左右运动。
61.换向电机304主要实现四向穿梭车的顶升与换向,将四向穿梭车的顶升动力与换向动力合二为一。驱动电机203主要为四向穿梭车在纵、横两个方向的四向运动提供动力,保证整车的运动只需一套动力。
62.在四向穿梭车的顶升与换向过程中,第二从动带轮213随着顶升架310一起上升或下降。通过优化同步轮结构,在顶升架310下降时,第二从动带轮213跟随下降,第二传动带212通过张紧轮216绷紧,可靠的将速度与扭矩传递给第二驱动轮301,实现整车的前后运动。在顶升架310上升时,第二从动带轮213跟随上升,第二传动带212自然伸长并且绷紧,无需另外增加张紧轮。
63.四向穿梭车的前、后、左、右四个方向都有2个驱动轮、2个从动轮,保证单边都有4个轮子,在单个轮子的承载不变的情况下,极大提高整车的承载能力。
64.本技术提出的穿梭车方案:穿梭车可纵、横四向行驶,采用一台四向穿梭车代替子母车组合系统,提高了空间利用率,也提高了货物的存取效率;采用机械结构,解决液压装置的泄露问题,并且提高了穿梭车的灵活度;采用单边4个轮子及强化的机架,提高了四向穿梭车的载重能力和通过能力;采用偏心轮、双连杆联动结构、传动带传动传动结构,将货架的举升动力与四向穿梭车的换向动力合二为一,既节约了成本,又减少了空间,极大降低四向穿梭车的外形尺寸;采用十字减速器、传动带,保证四向穿梭车的纵、横两个方向的四向运动只需一个动力,既节约了成本,又减少了空间,极大降低四向穿梭车的外形尺寸。
65.如图6所示,本发明另一实施方式中的四向行驶的穿梭车200的结构示意图。四向行驶的穿梭车200包括机架1’、行走驱动模块2’、换向模块3’、供电模块4’以及控制模块5’。其中,行走驱动模块2’支撑在机架1’上,机架1’可以是外壳的一部分或者固定于外壳,行走驱动模块2’用于带动机架1’和/或外壳沿着横向以及纵向行走,这里的横向和纵向仅用于区分大致垂直的两个方向,对具体的方向并不做限定,以图中箭头x方向为横向或者左右方向,箭头y方向为纵向或者前后方向进行具体说明。换向模块3’支撑在机架1’或者外壳上,用于切换机架1’沿横向或者纵向行走;控制模块5’连接行走驱动模块2’和换向模块3’,用
于控制行走驱动模块2’和换向模块3’的运行;供电模块4’给控制模块5’、行走驱动模块2’和换向模块3’提供能量。供电模块可以是电池,如采用48v蓄电池进行供电,实用环保,蓄电池可灵活更换。机架1’通过钣金折弯及局部加筋,连成一个整体,极大提高整车的承载能力。
66.参照图7到图9,行走驱动模块2’包括横向轮组、纵向轮组以及用于带动横向轮组和纵向轮组的行走驱动电机203’,行走驱动电机203’为伺服电机,行走驱动电机203’通过第一传动机构驱动横向轮组,行走驱动电机203’通过第二传动机构驱动纵向轮组,即穿梭车的纵、横两个方向的四向运动只需一个动力,既节约了成本,又减少了空间,极大降低小车的外形尺寸。
67.行走驱动模块还包括连接行走驱动电机203’的行走减速器204’,行走减速器204具有相互垂直的第一输出端和第二输出端,第一输出端和第二输出端分别连接第一传动机构和第二传动机构,从而通过一个电机将速度和扭矩传递给两个传动机构,实现横向轮组和纵向轮组的运动。
68.具体的,横向轮组包括沿横向间隔设置的4个第一驱动轮201’和4个第一从动轮202’,4个第一驱动轮201’和4个第一从动轮202’均支撑在机架上,即第一驱动轮201’、第一从动轮202’分布在整车的两侧,其中,4个第一驱动轮201’沿着纵向前后对称各设置2个、4个第一从动轮202’沿着纵向前后对称各设置2个,驱动电机203’和行走减速器204’支撑在机架1’上。第一驱动轮201’包括相对于机架1’的外侧第一驱动轮和内侧第一驱动轮,第一传动机构包括第一链条传动机构、驱动轴209’以及第一行走齿轮箱214’,第一链条机构的输入端连接于行走减速器204’的第一输出端,第一链条传动机构的输出端连接于驱动轴209’,驱动轴209’的两侧各连接一个第一行走齿轮箱214’,第一行走齿轮箱214’将驱动轴209’的旋转动力传递给第一驱动轮201’。其中,第一链条传动机构包括连接行走减速器204’第一输出端的第一传动链轮、由第一传动链轮带动的第二传动链轮以及安装在第一传动链轮和第二传动链轮上的第一传动链条208’,第二传动链轮套装在驱动轴209’上以带动驱动轴209’转动,驱动轴209’上连接有万向节210’,以使得传动更加平稳可靠。
69.参照图10所示,换向模块3’包括换向电机304’以及由换向电机304’带动的第三传动机构,第三传动机构与纵向轮组连接,换向电机304’通过第三传动机构带动纵向轮组上下运动实现机架1’沿横向或者纵向行走的切换。换向电机304’通过换向减速机305’将旋转动力传递给第三传动机构,换向电机304’和换向减速机305’支撑在机架1’上。换向模块3’还包括活动支撑在机架1’上的顶升架310’,纵向轮组安装于顶升架310’上,换向电机304’通过第三传动机构带动顶升架310’上下移动从而带动纵向轮组上下移动。
70.其中,纵向轮组包括安装于顶升架310’上的沿纵向间隔设置的4个第二驱动轮301’和4个第二从动轮302’,4个第二驱动轮301’沿着横向左右对称各设置2个,4个第二从动轮302’沿着横向左右对称各设置2个。第二驱动轮301’包括相对于顶升架310’的外侧第二驱动轮和内侧第二驱动轮,第二传动机构包括第二链轮传动机构和传动轴312’,第二链轮传动机构的输入端连接于行走减速器204’第二输出端,第二链轮传动机构的输出端连接于传动轴312’,传动轴312’的两侧各连接一个外侧第二驱动轮301’,传动轴312’和第二驱动轮301’之间可以根据实际需要选择是否设置齿轮箱进行减速。传动轴312’也可以连接万向节325,使得传动轴312’的传动更加平稳可靠。
71.第二链轮传动机构包括第二主动链轮、第二传动链条212’、第二从动链轮,第二主动链轮连接于行走减速器204’的第二输出端,即行走减速器204’分别与第一传动链轮、第三传动链轮连接。第二从动链轮由第二主动链轮驱动,第二传动链条212’由第二主动链轮和第二从动链轮驱动,第二从动链轮套设在传动轴312’上并带动传动轴312’旋转。机架1上连接有张紧机构316,用于第二链轮传动机构的链条张紧。
72.第三传动机构包括连接换向电机304’的换向轴308’以及连接换向轴308’的曲柄摇杆机构390,曲柄摇杆机构390将换向轴308’的旋转运动转化为顶升架310’的上下运动。
73.参照图11所示,曲柄摇杆机构390设置两个,分别位于机架1横向的两侧,每个曲柄摇杆机构390包括安装于机架1上的顶升换向齿轮箱391以及自顶升换向齿轮箱391的两端伸出的偏心轴392,换向电机304’通过减速机305’将动力传递给换向轴308’,间隔设置两个偏心轴392分别设置插入到顶升架310’上的长槽315内,偏心轴392的旋转带动顶升架310’上下移动。
74.顶升架310’上设有滑柱311’,机架上设有套筒218,滑柱311’沿着套筒218上下移动。4个套筒218固定在机架1的内部,左右两侧对称布置,以对顶升架310’的上下移动进行导向。
75.下面将详细说明穿梭车的运动过程。
76.驱动电机203’运转,通过行走减速器204’降速增扭后,速度和扭矩通过第一主动链轮、第一传动链条208’、第一从动链轮依次传递到驱动轴209’,再结合万向节210’、第一行走齿轮箱214’,把速度和扭矩分别传递给纵向前后的第一驱动轮201’上,从而驱动整车进行横向左右运动。第一驱动轮201’,既产生动力带动穿梭车进行移动,又起着支撑导向作用;第一从动轮202’,主要起支撑导向作用。
77.行走减速器204’有两个输出端,有2个动力传递路径,分别将速度与扭矩传递给第一主动链轮、第二主动链轮。另外一路动力,通过第二主动链轮、第二传动链条212’、第二从动链轮将速度与扭矩传递给传动轴312’。
78.第二驱动轮301’、第二从动轮302’分布在整车的两侧,固定在顶升架310’上。换向电机304’与换向减速机305’直接连接,换向电机304’运转,通过换向减速机305’降速增扭后,速度和扭矩传递到曲柄摇杆机构390。曲柄摇杆机构390的偏心轴392带动顶升架310’,顶升架310’沿着套筒218实现顶升或下降,最终实现货架的顶升或下降。
79.换向电机304’沿着第一方向旋转,带动曲柄摇杆机构390的偏心轴392旋转到低位,导致顶升架310’下降到低位,驱动整车进行前后运动。第二驱动轮301’,既产生动力带动穿梭车进行移动,又起着支撑导向作用;第二从动轮302’,主要起支撑导向作用。
80.换向电机304’沿着第二方向旋转,带动曲柄摇杆机构390的偏心轴392旋转到中间位置,导致顶升架310’位于中间位置,第二驱动轮301’和第二从动轮302’被抬升悬空,第一驱动轮201’、第一从动轮202’一起着地。驱动整车进行左右运动。第一驱动轮201’,既产生动力带动穿梭车进行移动,又起着支撑导向作用;第一从动轮202’主要起支撑导向作用。
81.换向电机304’继续沿着第二方向旋转,带动曲柄摇杆机构390的偏心轴392旋转到高位,导致顶升架310’上升到高位,实现顶升货物的功能。
82.也就是说,当曲柄摇杆机构的偏心轴在低位时往一个方向行走,当偏心轴到达中间位置时实现换向,此时车子往另一个方向行走,当偏心轴到达高位时,实现顶升货物的功
能,本发明的四向车实现了行走、换向、顶升全过程自动化,提高了四向车的性能和换向效率,并且只有两个电机的动力输入,节约了成本和简化了机构。
83.换向电机304’主要实现四向穿梭车的顶升与换向,将四向穿梭车的顶升动力与换向动力合二为一。驱动电机203’主要为四向穿梭车在纵、横两个方向的四向运动提供动力,保证整车的运动只需一套动力。
84.本技术提出的穿梭车方案:穿梭车可纵、横四向行驶,采用一台四向穿梭车代替子母车组合系统,提高了空间利用率,也提高了货物的存取效率;采用机械结构,解决液压装置的泄露问题,并且提高了穿梭车的灵活度;采用单边4个轮子及强化的机架,提高了四向穿梭车的载重能力和通过能力;采用曲柄摇杆机构、传动链条传动结构,将货架的举升动力与四向穿梭车的换向动力合二为一,既节约了成本,又减少了空间,极大降低四向穿梭车的外形尺寸;采用行走减速器、传动链条,保证四向穿梭车的纵、横两个方向的四向运动只需一个动力,行走、换向、顶升全过程自动化,既节约了成本,又减少了空间,极大降低四向穿梭车的外形尺寸。
85.本发明实施例还提供一种包括上述四向行驶的穿梭车100的自动化仓储装置。自动化仓储装置可以是自动化仓库、物流中转站、分拣装置等等。
86.应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
87.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。