1.本发明涉及工业控制技术领域,尤其涉及的是一种火电机组控制系统的控制方法及装置。
背景技术:
2.新能源电力在电源结构布局中的比例逐步增加,以化石能源为一次能源的传统发电比例逐渐降低。但在未来相当长的时间(约50年)内,传统化石能源的主导地位仍然不会改变。然而,随着并网新能源电力比率的不断提高,其随机波动性降低了电源侧的可控性,使得电力系统原有的供需平衡可控性被打破,导致我国当前出现弃风、弃光现象。
3.多能源互补可以利用相对可控的电源实现对波动性电源的平抑,进而构成连续稳定可调可控的发电功率输出,为电力系统的实时供需平衡提供可靠保障。综合考虑我国的电源结构特征,燃煤机组在传统化石能源发电形式中占比近90%,必须成为主导的互补电源并不断提升弹性运行能力。
4.随着电网相关细则规定的出台,进一步明确了大型燃煤发电机组参与电网深度调峰的重要作用,这意味着火电机组将经常于深度变负荷状态运行,传统协调控制方案在新的形势下逐渐不能满足要求,因此在机组安全稳定运行的基础上,研究能有效提升机组灵活性的协调控制优化方案具有重大意义。
5.同时,国家对火力发电机组的环保排放指标要求越来越高,很多火力发电机组完成了低氮燃烧器改造,改造后的锅炉配煤配风方式与设计工况偏离较大导致机组吸热原理发生根本性改变,从而增大过热汽温波动幅度,造成超温现象频发、人员操作干预增多、监盘压力增大。常规汽温控制采用pid 控制为基础的串级、导前微分等控制策略,控制效果并不理想。
技术实现要素:
6.本文提供一种火电机组控制系统的控制方法及装置,能够提高控制系统的抗干扰能力。
7.根据本技术的第一方面,本发明实施例提供一种火电机组控制系统的控制方法,包括:
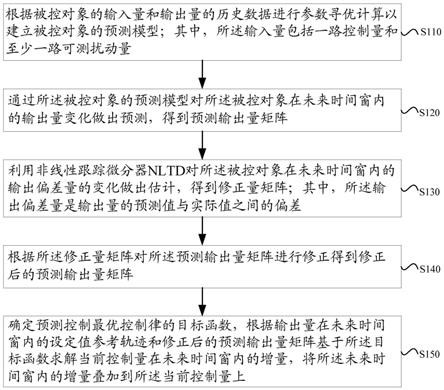
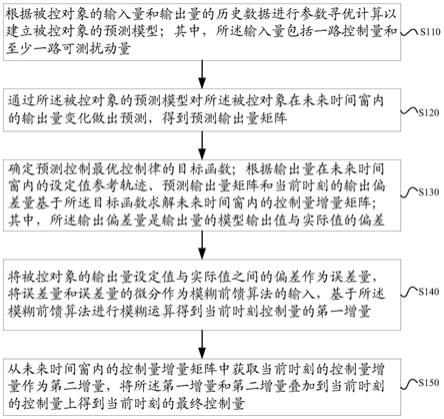
8.根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型;其中,所述输入量包括一路控制量和至少一路可测扰动量;
9.通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵;
10.确定预测控制最优控制律的目标函数;根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵;其中,所述输出偏差量是输出量的模型输出值与实际值的偏差;
11.将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量
的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量;
12.从未来时间窗内的控制量增量矩阵中获取当前时刻的控制量增量作为第二增量,将所述第一增量和第二增量叠加到当前时刻的控制量上得到当前时刻的最终控制量。
13.根据本技术的第二方面,本发明实施例提供一种火电机组控制系统的控制装置,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被所述处理器执行时实现上述火电机组控制系统的控制方法的步骤。
14.根据本技术的第三方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被处理器执行时实现上述火电机组控制系统的控制方法的步骤。
15.与相关技术相比,本发明实施例提供的一种火电机组控制系统的控制方法及装置,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型;其中,所述输入量包括一路控制量和至少一路可测扰动量;通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵;确定预测控制最优控制律的目标函数;根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵;其中,所述输出偏差量是输出量的模型输出值与实际值的偏差;将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量;从未来时间窗内的控制量增量矩阵中获取当前时刻的控制量增量作为第二增量,将所述第一增量和第二增量叠加到当前时刻的控制量上得到当前时刻的最终控制量。本发明实施例的技术方案将多变量预测控制算法和模糊控制算法相结合,可以对可测扰动和不可测扰动进行有效抑制,提高了控制系统的抗干扰能力。
附图说明
16.图1为本发明实施例1的一种火电机组控制系统的控制方法的流程图。
具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
18.在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行。并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
19.实施例1
20.如图1所示,本发明实施例提供了一种火电机组控制系统的控制方法,包括:
21.步骤s110,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型;其中,所述输入量包括一路控制量和至少一路可测扰动量;
22.步骤s120,通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵;
23.步骤s130,确定预测控制最优控制律的目标函数;根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵;其中,所述输出偏差量是输出量的模型输出值与实际值的偏差;
24.步骤s140,将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量;
25.步骤s150,从未来时间窗内的控制量增量矩阵中获取当前时刻的控制量增量作为第二增量,将所述第一增量和第二增量叠加到当前时刻的控制量上得到当前时刻的最终控制量。
26.在上述实施例中,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型;其中,所述输入量包括一路控制量和至少一路可测扰动量;通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵;确定预测控制最优控制律的目标函数;根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵;其中,所述输出偏差量是输出量的模型输出值与实际值的偏差;将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量;从未来时间窗内的控制量增量矩阵中获取当前时刻的控制量增量作为第二增量,将所述第一增量和第二增量叠加到当前时刻的控制量上得到当前时刻的最终控制量以实现对被控对象的闭环控制。上述闭环控制方法将多变量预测控制算法和模糊控制算法相结合,可以对可测扰动和不可测扰动进行有效抑制,从而提高控制系统的抗干扰能力。
27.火电机组控制系统存在惯性大和纯滞后的工艺环节,比如脱硝喷氨系统、磨出口风温系统、过热汽温控制系统等等。多变量预测控制算法利用辨识出来的多变量模型预测系统输出量未来一段时间的值并求解控制律,但是由于火电厂锅炉燃烧情况很复杂,除了可测扰动量之外,还存在着诸多不可测干扰因素(如煤质的变化等)及模型失配的影响,对于这一部分不可测扰动采用模糊控制(fuzzy control,简称fc)进行处理,并实现多变量预测控制与模糊控制的融合,能够对可测扰动和不可测扰动进行有效抑制,从而提高控制系统的抗干扰能力。
28.在一些示例性的实施方式中,所述被控对象的输入量包括一路控制量和三路可测扰动量;
29.在一些示例性的实施方式中,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型,包括:
30.根据被控对象的输入量和输出量的历史数据进行参数寻优计算得到被控对象的受控自回归积分滑动平均过程(controlled autoregressive integrated moving average,简称carima)模型,所述被控对象的carima 模型通过公式(1)确定:
[0031][0032]
其中,k代表当前时刻;y(k)代表当前时刻的输出量;u(k-1)代表上一时刻的控制量;v1(k-1)代表上一时刻的第一可测扰动量;v2(k-1)代表上一时刻的第二可测扰动量;v3(k-1)代表上一时刻的第三可测扰动量;e(k)为均值为零的白噪声;δ=1-z-1
为差分算子;a(z-1
),b(z-1
),b1(z-1
),b2(z-1
),b3(z-1
), c(z-1
)均为z-1
的多项式;
[0033][0034][0035][0036][0037][0038][0039]
在一些示例性的实施方式中,当所述被控对象为过热汽温控制系统时,所述被控对象的输入量包括一路控制量和三路可测扰动量;其中,所述一路控制量为过热器减温水流量,三路可测扰动量分别为:主蒸汽流量、给煤量和减温器前蒸汽温度;输出量为过热器出口汽温。
[0040]
在一些示例性的实施方式中,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型,还包括:
[0041]
对所述carima模型加阶跃信号得到所述carima模型的阶跃响应;
[0042]
利用基于热工对象传递函数g(s)的多变量线性离散状态空间模型,采用粒子种群优化(particle swarm optimization,简称pso)算法对所述 carima模型的阶跃响应进行识别以得到被控对象的简化的传递函数模型;
[0043][0044]
其中,k、α表示增益信息,m、n表示阶次信息,β表示微分时间常数,τ表示纯滞后时间常数,t表示惯性时间常数。简化后所得到的热工对象传递函数模型包括更少的参数,将此模型用于g矩阵的计算,简化了(g
t
g λ)-1
的计算,缩短了计算时间,确保了(g
t
g λ)-1
可求解。
[0045]
在一些示例性的实施方式中,通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵,包括:
[0046]
确定未来时间窗对应的预测步数为n步,则预测输出量矩阵y通过公式(2)确定:
[0047]
ꢀꢀ
[0048][0049]
其中,其中,是第 j步预测的预测输出量,也写作k代表当前时刻;代表当前时刻的模型输出量;
[0050][0051][0052][0053][0054]
δu(k)=[δu(k),δu(k 1),...,δu(k n-1)]
t
;
[0055][0056]
δu(k-1)=[δu(k-nb),δu(k-nb 1),...,δu(k-1)]
t
;
[0057]
g1(z-1
)=[g
11
(z-1
),g
12
(z-1
),...,g
1n
(z-1
)]
t
;
[0058]
g2(z-1
)=[g
21
(z-1
),g
22
(z-1
),...,g
2n
(z-1
)]
t
;
[0059]
g3(z-1
)=[g
31
(z-1
),g
32
(z-1
),...,g
3n
(z-1
)]
t
;
[0060]
f(z-1
)=[f1(z-1
),f2(z-1
),...,fn(z-1
)]
t
。
[0061]
在一些示例性的实施方式中,确定预测控制最优控制律的目标函数,包括:
[0062]
确定未来时间窗对应的预测步数为n步,控制量的控制步数为m步,预测控制最优控制律的目标函数j通过公式(3)确定:
[0063]
[0064]
将目标函数j表示为公式(4):
[0065]
j=[y(k 1)-yr(k 1)]
t
[y(k 1)-yr(k 1)] λδu(k)
t
δu(k)
ꢀꢀꢀꢀꢀꢀ
(4)
[0066][0067][0068]
yr(k 1)=[yr(k 1),yr(k 2),...,yr(k n)]
t
;
[0069]
δu(k)=[δu(k),δu(k 1),...,δu(k m-1)]
t
;
[0070]
λ=[λ1,λ2,...,λm]
t
;
[0071]
其中,qj是第j步预测的误差对应的加权系数,λi是第i-1步控制的控制量增量对应的加权系数;δu(k i-1)是第i-1步控制的控制量增量;yr(k j)是第j步预测对应的输出量设定值;y(k 1)是未来时间窗内的预测输出量矩阵,yr(k 1)是输出量在未来时间窗内的设定值参考轨迹,δu(k)是未来时间窗内的控制量增量矩阵。
[0072]
在一些示例性的实施方式中,根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵,包括:
[0073]
设定控制量的控制步数m小于未来时间窗对应的预测步数n,对g矩阵进行化简,化简后的g矩阵为:
[0074][0075]
将目标函数j对δu(k)求导,并令求导结果为零,得到未来时间窗内的控制量增量矩阵δu(k),δu(k)通过公式(5)确定:
[0076]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[0077][0078]
其中,e(k)=[err(k),err(k),...,err(k)]
t
;
[0079]
err(k)是当前时刻的输出偏差量,e(k)是未来时间窗内的输出偏差量矩阵。
[0080]
在一些示例性的实施方式中,将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量,包括:
[0081]
将被控对象的输出量设定值与实际值之间的偏差作为误差量e, e=y
r-y;其中,yr是输出量的设定值,y是输出量的实际值;
[0082]
将误差量e和误差量e的微分作为模糊前馈算法的输入,模糊前馈算法的输出量为f;
[0083]
确定模糊前馈算法的两路输入和一路输出的确切量论域范围,将确切量转化为等级量的区间向量并进行等级量的划分;
[0084]
确定模糊前馈算法的两路输入和一路输出的模糊量论域范围和模糊子集;
[0085]
根据模糊规则进行计算,通过加权平均判决规则进行输出非模糊化处理,得到一
个确切量的输出f;
[0086]
将f作为当前时刻控制量的第一增量。
[0087]
在一些示例性的实施方式中,确定模糊前馈算法的两路输入和一路输出的确切量论域范围,将确切量转化为等级量的区间向量并进行等级量的划分,包括:
[0088]
e的确切量论域范围是:[-8,8];
[0089]
的确切量论域范围是:[-3,3];
[0090]
输出量f的确切量论域范围是:[-20,20];
[0091]
e转化为等级量的区间向量是:[-8,-4,-2,-1,1,2,4,8];
[0092]
e的等级量划分是:[-3,-2,-1,0,1,2,3];
[0093]
转化为等级量的区间向量是:[-3,-2,-1,-0.5,0.5,1,2,3];
[0094]
的等级量划分是:[-3,-2,-1,0,1,2,3];
[0095]
输出量f转化为等级量的区间向量是:[-18,18];
[0096]
输出量f的等级量划分是:[-3,-2,-1,0,1,2,3];
[0097]
在一些示例性的实施方式中,确定模糊前馈算法的两路输入和一路输出的模糊量论域范围,包括:
[0098]
e的模糊量论域范围是:[nb,nm,ns,zo,ps,pm,pb];
[0099]
的模糊量论域范围是:[nb,nm,ns,zo,ps,pm,pb];
[0100]
输出量f的模糊量论域范围是:[nb,nm,ns,zo,ps,pm,pb];
[0101]
在一些示例性的实施方式中,e的模糊子集列表如下表1所示:
[0102][0103]
表1
[0104]
表1中,e代表误差量e在确切量论域范围内的等级量划分,e代表误差量e在模糊量论域范围内的划分,表格中的数值代表隶属度。
[0105]
在一些示例性的实施方式中,的模糊子集列表如下表2所示:
[0106][0107]
表2
[0108]
表2中,代表在确切量论域范围内的等级量划分,代表在模糊量论域范围内的划分,表格中的数值代表隶属度。
[0109]
在一些示例性的实施方式中,f的模糊子集列表如下表3所示:
[0110][0111]
表3
[0112]
表3中,f代表输出量f在确切量论域范围内的等级量划分,f代表输出量f在模糊量论域范围内的划分,表格中的数值代表隶属度。
[0113]
在一些示例性的实施方式中,模糊规则包括以下规则:
[0114][0115]
其中∪代表“并”的关系。
[0116]
以模糊规则为例,该条模糊规则代表的语法结构是:再以模糊规则为例,该条模糊规则代表的语法结构是:其他模糊规则和上述两条模糊规则的语法结构相同。
[0117]
在一些示例性的实施方式中,加权平均判决规则包括公式(6)表示的规则:
[0118][0119][0120]
其中,fi代表f的第i个等级量,μf(fi)代表fi属于f的隶属度,f
max
、f
min
代表f的上下限值,fm代表划分等级量的个数。
[0121]
在一些示例性的实施方式中,第j步预测对应的输出量设定值通过以下方式确定:
[0122]
通过公式(7)设定第j步预测对应的输出量yr(k j)
[0123]
yr(k j)=αyr(k j-1) (1-α)y
sp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0124][0125]
其中,α为柔化因子,0<α<1;y
sp
为输出量的目标值。比如,对于一个温度控制系
统,如果50度是该温度控制系统的目标温度,那么y
sp
为 50度。
[0126]
在一些示例性的实施方式中,将被控对象的输出量设定值与实际值之间的偏差作为误差量,还包括:
[0127]
如果被控对象满足热工模型传递函数g(s),则对被控对象的输出量设定值yr(s)进行如下公式(8)的处理:
[0128]
yr(s)=g(s).y
sp
(s)
ꢀꢀꢀ
(8)
[0129]
其中,
[0130]
k、α表示增益信息,m、n表示阶次信息,β表示微分时间常数,τ表示纯滞后时间常数,t表示惯性时间常数,y
sp
(s)是输出量的目标值的拉式变换。
[0131]
实施例2
[0132]
本发明实施例提供了一种火电机组控制系统的控制装置,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被所述处理器执行时实现上述实施例1中所述的火电机组控制系统的控制方法的步骤。
[0133]
实施例3
[0134]
本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被处理器执行时实现上述实施例1中所述的火电机组控制系统的控制方法的步骤。
[0135]
本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于 ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
[0136]
需要说明的是,本发明还可有其他多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。