基于gan和自注意力的雷达高分辨距离像降噪识别方法
技术领域
1.本发明属于目标识别技术领域,更进一步涉及一种端到端的雷达高分辨距离像hrrp降噪与目标识别方法,可用于实现低信噪比环境下飞机、卫星等目标的特征提取与识别。
背景技术:
2.目标高分辨距离像hrrp是用宽带雷达信号获取的目标散射点子回波在雷达视线方向投影的矢量和的幅度波形,它包含了目标尺寸、结构、散射点分布这些重要信息,高分辨距离像hrrp识别是雷达自动目标识别ratr领域的重要研究方向。在实际应用场景中,目标的hrrp中包含噪声,噪声的存在会干扰特征提取过程,从而影响目标识别结果。
3.针对含噪hrrp,现有目标识别方法大致采用以下三种方案:
4.1)直接进行识别,不对包含噪声的hrrp做特殊处理,将其输入针对无噪hrrp建立的目标识别模型,给出识别结果,此类方法步骤简单,但适配性较低,识别性能较差;
5.2)提取稳健特征,根据hrrp的物理特性,提取hrrp的噪声稳健特征,如复数雷达信号的双谱特征、目标主要散射中心的散射系数和位置等,进而依据这些特征设计分类器进行目标识别,但此类方法需要人工设计进行特征提取,当环境改变时性能受限;
6.3)先降噪再识别,分别构建降噪模型和识别模型,先使用降噪模型对含噪hrrp进行降噪,生成高信噪比的hrrp,再使用识别模型对高信噪比的hrrp进行特征提取与识别,此类方法可以利用多种已知的识别模型,但识别结果无法指导降噪过程,从而可能使降噪过程丢失有效识别特征。
7.c.zhao,x.he,j.liang,t.wang,c.huang,在其发表的论文“radar hrrp target recognition via semi-supervised multi-task deep network”(ieee access,2019)中针对低信噪比环境下hrrp目标识别问题,提出一种半监督多任务识别框架,包含dubdnet和rsrnet两种模型,分别实现低信噪比hrrp的降噪与识别,将含噪的hrrp输入dubdnet,得到降噪后的hrrp,再使用rsrnet完成目标识别。但是这种方法先训练降噪模型,再训练识别模型,两个过程互不影响,可能存在部分可分性强的特征在降噪过程中被当作噪声消除,进而影响识别率的问题。
8.j.nie,y.xiao,l.huang,f.lv,在其发表的论文“time-frequency analysis and target recognition of hrrp”(2021,complexity)中提出一种基于cn-lsgan、stft和cnn的识别方法,cn-lsgan用于对低信噪比的hrrp进行降噪,使用stft对降噪后的hrrp进行变换,得到能够同时表示信号时域与频域信息的二维时频图,再使用cnn对二维时频图进行特征提取,进而得到目标识别结果。但是这种方法同样将降噪和识别两个过程分开处理,并不是端到端模型,依然存在部分可分性强的特征被当作噪声消除的问题。
9.近年来,深度学习被广泛应用于基于hrrp的自动目标识别atr中,此类方法通过数据驱动进行特征提取,获得了优良的识别性能,在雷达目标识别研究中受到广泛关注。
10.现有基于深度学习的特征提取方法大致可采用以下几种方案:
11.1)自编码器
12.自编码模型ae是一种尽可能复现输入信号的神经网络,属于无监督学习算法,由编码器和解码器两部分组成,该两部分可以看作是一个特征提取过程,编码器的输出可作为数据特征用于分类或识别等后续任务中。但此类方法对于提取hrrp样本的结构化信息的能力有限。
13.2)卷积神经网络
14.卷积神经网络cnn通过一系列的卷积、池化操作,提取出原始信号中的局部特征以及深层次的稳健特征信息,其具备较好的泛化能力,但cnn无法表示数据段间的先后关系。
15.3)循环神经网络
16.在对有时序关系的数据进行建模时,循环神经网络rnn可发挥优势,其内部结构中包含神经元对自身的递归连接,可以实现对历史信息的记忆与传递,因此被大量应用于序列数据的分类、预测和生成任务。但是这种方法忽略了hrrp样本中的目标区域和噪声区域对于识别结果的影响程度不同的特点,识别能力仍有待提高。
17.4)注意力机制
18.注意力是人脑中的一种复杂认知功能,指人可以在关注一些信息的同时选择忽略另一些信息的能力。在使用神经网络来处理大量的输入信息时,可以借鉴人脑的注意力机制,重点关注一些关键的输入信息,来提高神经网络的效率。
19.b.xu,b.chen,j.wan,h.liu,l.jin在其发表的论文“target-aware recurrent attentional network for radar hrrp target recognition”(signal processing,2019)提出一种基于rnn的注意模型,该方法的具体步骤为:首先使用rnn对单个hrrp样本的各个数据段进行编码,并提取各距离单元间的时序相关性,然后利用注意力机制根据各数据段对识别贡献程度,赋予各时间步输出不同的权值系数,使用该系数对各时间步输出进行加权求和作为可分性特征,最后用该可分性特征连接softmax分类器输出识别结果。该方法由于需要借助rnn对hrrp进行建模,因而无法提取远距离依赖信息,且无法并行处理hrrp中的各数据段。
20.刘家麒,陈渤,介茜在2019年雷达学报发表的论文“基于注意力机制和双向gru模型的雷达hrrp目标识别”中提出将双向gru与注意力机制结合,该方法的具体步骤为:将时域的hrrp样本通过滑窗分为正反两个序列,将其分别通过两个相互独立的gru网络进行特征提取,然后将同时刻提取到的特征进行拼接,从而利用了hrrp双向的时序信息,通过注意力机制得到加权求和后的隐层特征进行目标的识别与分类。该方法虽然利用了hrrp双向的时序信息,但仍然存在无法提取远距离依赖信息的问题。
技术实现要素:
21.本发明的目的在于针对上述现有技术的不足,提出一种基于生成对抗网络gan和自注意力的雷达高分辨距离像降噪识别方法,以重建高信噪比hrrp,并通过提取hrrp中的远距离依赖信息,提高低信噪比环境下对目标的识别性能。
22.本发明的技术思路是:通过gan生成高信噪比hrrp,使用滑窗法对一维高信噪比hrrp样本进行处理,生成序列样本,通过构建一个基于自注意力的深度神经网络,得到hrrp样本的目标识别结果,其实现方案包括如下:
23.(1)对三类飞机目标的雷达回波进行划分和处理,生成训练样本集s1和测试样本集s2;
24.(2)构建雷达高分辨距离像降噪与识别网络:
25.建立生成器,其由五个卷积层和五个反卷积层依次连接组成,每个卷积层均有leakyrelu操作,每个反卷积层后均有leakyrelu和跳跃连接操作,用于对含噪hrrp进行降噪,产生降噪后的高信噪比hrrp;
26.建立判别器,其由五个卷积层、一个flatten层和两个全连接层依次连接组成,每个卷积层后均有leakyrelu操作,用于辅助生成器提升降噪性能;
27.建立识别器,其包括滑窗层、位置编码层、三个全连接层、五组特征提取器、一个flatten层和一个softmax分类器,且滑窗层、位置编码层、第三全连接层、五组特征提取器、flatten层、第四全连接层、第五全连接层、softmax分类器依次连接,用于对高信噪比hrrp进行特征提取并给出目标识别结果;
28.将生成器分别与判别器和识别器连接,构成基于生成对抗网络gan和自注意力的雷达高分辨距离像降噪识别网络;
29.(3)将训练样本集s1,输入到(2)构建的降噪识别网络,通过反向传播算法对其进行对抗训练,得到训练好的基于gan和自注意力的雷达高分辨距离像降噪识别网络;
30.(4)将测试样本集s2,输入训练好的基于gan和自注意力的雷达高分辨距离像降噪识别网络进行测试,得到网络输出的目标识别结果。
31.本发明与现有技术相比具有以下优点:
32.第一,由于本发明的识别器在位置编码层采用位置编码表征hrrp数据段之间的先后关系,可以充分利用序列中的时序信息,并在特征提取器的自注意力层采用自注意力机制使模型更关注可区分性强的目标区域及充分提取各数据段间的依赖性关系,克服了现有技术中丢失远距离依赖信息的问题,提高了特征提取能力和对目标的识别性能。
33.第二,本发明由于通过生成器将含噪的低信噪比hrrp转换为降噪后的高信噪比hrrp,并直接将高信噪比hrrp输入识别器以获得目标类别,克服了现有技术中分步进行降噪和识别,导致无法实现端到端训练的问题。
34.第三,本发明由于在训练时将识别器的损失函数与生成器的损失函数耦合,使生成器在降噪过程中能保留对识别过程有用的可分性特征,有效减少了现有技术中降噪过程造成的识别信息丢失问题,可提高在低信噪比环境下的目标识别性能。
附图说明
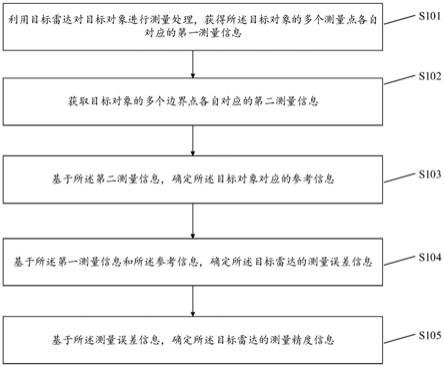
35.图1是本发明的实现流程图。
36.图2是本发明中的网络框架图。
具体实施方式
37.下面结合附图对本发明的实施例和效果做进一步的描述。
38.参照图1,对本实施例的实现步骤如下。
39.步骤1,生成训练样本集和测试样本集。
40.1.1)分别获取安26飞机、奖状飞机和雅克42飞机这三类飞机目标的原始雷达回
波,从每段回波数据的第一次回波开始,间隔20次回波进行采样,并对采样后的原始雷达回波分别加入固定信噪比的高斯白噪声,得到每类目标含噪的雷达回波;
41.1.2)分别对采样后的每类目标原始雷达回波和含噪的雷达回波做傅里叶变换,得到不含噪的雷达高分辨距离像hrrp和含噪的雷达高分辨距离像hrrp;
42.1.3)分别对1.2)得到的不含噪的hrrp和含噪的hrrp进行2范数归一化以及重心对齐的预处理;
43.1.4)根据三类飞机航迹,选取安26飞机的第五、第六段雷达回波,奖状飞机的第六、第七段雷达回波,雅克42飞机的第二、第五段雷达回波,共六段雷达回波数据段对应的1.3)预处理后不含噪的hrrp和含噪的hrrp,作为训练样本集s1;将其余雷达回波数据段对应的1.3)预处理后不含噪的hrrp和含噪的hrrp,作为测试样本集s2。
44.步骤2,构建基于gan和自注意力的雷达高分辨距离像降噪识别网络。
45.2.1)建立生成器:其由五个卷积层和五个反卷积层依次连接组成,每个卷积层均有leakyrelu操作,每个反卷积层后均有leakyrelu和跳跃连接操作,用于对含噪hrrp进行降噪,产生降噪后的高信噪比hrrp;
46.该生成器的各层参数设置如下:
47.五个卷积层与五个反卷积层的卷积核大小均为15;
48.第一卷积层、第四反卷积层的卷积核数量均为16个;
49.第二卷积层、第三卷积层、第二反卷积层、第三反卷积层的卷积核数量均为32个;
50.第四卷积层、第五卷积层、第一反卷积层的卷积核数量均为64个;
51.第五反卷积层的卷积核数量为1个;
52.2.2)建立判别器:其由五个卷积层、一个flatten层和两个全连接层依次连接组成,每个卷积层后均有leakyrelu操作,用于辅助生成器提升降噪性能;
53.该判别器的各层参数设置如下:
54.五个卷积层的卷积核大小均为15;
55.第六卷积层的卷积核数量为16个;
56.第七卷积层、第八卷积层的卷积核数量均为32个;
57.第九卷积层、第十卷积层的卷积核数量均为64个;
58.第一全连接层的神经元数量为8个;
59.第二全连接层的神经元数量为1个;
60.2.3)建立识别器:其包括滑窗层、位置编码层、三个全连接层、五组特征提取器、一个flatten层和一个softmax分类器,且滑窗层、位置编码层、第三全连接层、五组特征提取器、flatten层、第四全连接层、第五全连接层、softmax分类器依次连接,用于对高信噪比hrrp进行特征提取并给出目标识别结果;
61.该识别器的各层作用及结构参数如下:
62.所述滑窗层,用于对生成器输出的高信噪比hrrp按窗长d=6和步长进行滑窗,将其转化为序列长度为t=84的序列形式hrrp作为输出;
63.所述位置编码层,用于使用正弦函数生成t=84个位置编码,其正弦函数表示如下:
64.pe(pos,j)=cos(pos/10
2j/t
)
65.其中,pos∈[1,t]表示当前计算的位置编码在序列中的序号,j∈[1,d]表示当前计算的是位置编码的第j个元素,这些t个位置编码与滑窗层的输出按对应项相加的结果为该位置编码层的输出;
[0066]
所述五组特征提取器,用于提取序列数据间的依赖关系,每组特征提取器均由依次级联的自注意力层、残差连接层、归一化层、前馈层、残差连接层和归一化层组成;
[0067]
该自注意力层的输入为对于第一组特征提取器,x表示位置编码层的输出,对于其他四组特征提取器,x表示前一组特征提取器的输出,该自注意力层的输出为式中:式中:其中,其中,均为可学习的参数矩阵,设置d
model
=dk=dv=128;
[0068]
该前馈层包含两个全连接层,其神经元个数分别为512和128;
[0069]
所述第三、第四、第五全连接层的神经元数量分别为128、3072和3;
[0070]
2.4)将生成器分别与判别器和识别器连接,构成基于gan和自注意力的雷达高分辨距离像降噪识别网络。
[0071]
步骤3,训练基于gan和自注意力的雷达高分辨距离像降噪识别网络。
[0072]
参照图2,本步骤的具体实现如下:
[0073]
3.1),初始化基于gan和自注意力的雷达高分辨距离像降噪识别网络中的所有可学习的参数;
[0074]
3.2)将训练样本集s1中含噪的高分辨距离像x1输入到生成器,沿网络结构逐层计算,产生降噪后的高分辨距离像x2;
[0075]
3.3)将训练样本集s1中不含噪的高分辨距离像x3与含噪高分辨距离像x1连接,得到真样本r=[x3,x1],将3.2)中生成器产生的降噪后的高分辨距离像x2与含噪高分辨距离像x1连接,得到假样本f=[x2,x1],将真样本r和假样本f输入到判别器,沿网络结构逐层计算,得到判别器的输出,即样本真假;
[0076]
3.4)将3.2)中生成器产生的降噪后的高分辨距离像x2输入识别器,沿网络结构逐层计算,得到识别器的输出,即目标类别;
[0077]
3.5)设定生成器的损失函数lg(d,g):
[0078][0079]
其中,表示期望运算,d表示判别器,g表示生成器,g(x1)表示降噪后的高分辨距离像x2,λ是正则化项系数,表示l1正则化项,表示l2正则化项,α是l1正则化项与l2正则化项的比例系数,β是识别损失系数,表示识别器损失函数,tk表示目标的真实类别向量中的第k个元素,yk表示识别器的输出向量中的第k个元素,k表示目标种类数量;
[0080]
3.6)设定判别器的损失函数ld(d,g):
[0081][0082][0083]
其中,l
gp
表示梯度惩罚项,λ
gp
表示梯度惩罚项的系数,表示梯度运算,是直线上的点,ε是从[0,1]的均匀分布中随机抽取的数字;
[0084]
3.7)对判别器中的可学习参数wd进行更新,更新公式为:
[0085][0086]
其中,是判别器当前更新后得到的参数,是判别器更新前的参数,ηd是判别器学习率,是损失函数ld(d,g)对的梯度;
[0087]
3.8)使用判别器更新后的参数再次进行3.2)到3.5)的计算过程,并对生成器中可学习的参数wg和识别器中可学习的参数wr进行更新,更新公式为:
[0088][0089][0090]
其中,是生成器当前更新后得到的参数,是识别器当前更新后得到的参数,是生成器更新前的参数,是识别器更新前的参数,ηg是生成器和识别器的学习率,是损失函数lg(d,g)对的梯度,是损失函数lg(d,g)对的梯度;
[0091]
3.9)使用生成器更新后的参数和识别器更新后的参数再次重复进行3.2)到3.7),进行多次迭代更新,直到当损失函数l
rec
稳定收敛后,停止迭代,获得生成器中的可学习参数wg、判别器中的可学习参数wd、识别器中的可学习参数wr的最优值,得到训练好的基于gan和自注意力的雷达高分辨距离像降噪识别网络。
[0092]
步骤4,将测试样本集s2,输入训练好的基于gan和自注意力的雷达高分辨距离像降噪识别网络进行测试,得到网络输出的识别结果。
[0093]
本发明的效果可以通过以下仿真实验说明。
[0094]
1、仿真实验条件:
[0095]
本发明的仿真实验所用数据为国内某研究所雷达实测飞机数据,该雷达的中心频率约为5.5ghz,信号带宽为400mhz,所测数据共包含3类目标飞机,分别为中型螺旋桨飞机“安26”、小型喷气式飞机“奖状”、中型喷气式飞机“雅克42”。实测数据根据飞机航迹被划分为不同数据段,其中“安26”和“奖状”各分为7段,“雅克42”分为5段。仿真实验从每段数据的第一次回波开始,间隔20次回波进行采样,最终选取“安26”的第5、6段的2600次回波、“奖
状”的第6、7段的2600次回波、“雅克42”的第2、5段的2198次回波作为训练数据;“安26”的第1-4及7段的6256次回波、“奖状”的第1-5段的6500次回波、“雅克42”的第1及3-4段的3900次回波作为测试数据。所有回波均为1
×
256的向量。
[0096]
数据集1:对训练数据和测试数据做傅里叶变换、2范数归一化和重心对齐,得到不含噪的高分辨距离像hrrp分别作为训练样本集d1和测试样本集d2;
[0097]
数据集2:对训练数据和测试数据中加入信噪比为15db的高斯白噪声,对添加噪声后的数据做傅里叶变换、2范数归一化和重心对齐,得到15db环境下含噪的高分辨距离像hrrp,分别与训练样本集d1和测试样本集d2中不含噪的hrrp组合,作为训练样本集d3和测试样本集d4;
[0098]
数据集3:对训练数据和测试数据中加入信噪比为10db的高斯白噪声,对添加噪声后的数据做傅里叶变换、2范数归一化和重心对齐,得到10db环境下含噪的高分辨距离像hrrp,分别与训练样本集d1和测试样本集d2中不含噪的hrrp组合,作为训练样本集d5和测试样本集d6;
[0099]
数据集4:对训练数据和测试数据中加入信噪比为5db的高斯白噪声,对添加噪声后的数据做傅里叶变换、2范数归一化和重心对齐,得到5db环境下含噪的高分辨距离像hrrp,分别与训练样本集d1和测试样本集d2中不含噪的hrrp组合,作为训练样本集d7和测试样本集d8。
[0100]
仿真实验硬件平台为intel xeon e5-2683@2.00ghz cpu、64gb ram、nvidia geforce gtx1080 ti gpu,仿真实验软件平台为matlab2016、python 3.6和tensorflow 1.8。
[0101]
2、仿真实验内容与结果分析:
[0102]
仿真实验1:使用数据集1,分别应用现有注意循环神经网络方法和本发明中的识别器对不含噪的hrrp进行目标识别。
[0103]
仿真实验2:使用数据集2、数据集3、数据集4,分别应用现有注意循环神经网络方法、本发明中的识别器和本发明方法分别对15db、10db、5db信噪比环境下含噪的hrrp进行目标识别。
[0104]
通过以下公式分别计算这三种方法在不含噪和信噪比为15db、10db、5db四种环境下的识别正确率:
[0105][0106]
其中,a表示测试样本集的识别正确率,n表示测试样本集的样本数量,h(
·
)表示识别鉴别函数,t(i)表示测试样本集中第i个测试样本的真实类别,y(i)表示测试样本集中第i个测试样本对应的网络输出结果,当t(i)和y(i)相等时,h(t(i),y(i))等于1,否则,h(t(i),y(i))等于0。
[0107]
具体计算结果如表1所示:
[0108]
表1在信噪比为5db,10db,15db和不含噪环境下三种方法的识别率对比
[0109][0110]
从仿真结果可以看出以下结论:
[0111]
本发明提出的识别器相比现有技术的注意循环神经网络方法的识别正确率在不含噪环境下提高了2.72%,说明本发明提出的识别器使用自注意力机制进行特征提取,能够提高雷达高分辨距离像的识别正确率。
[0112]
本发明方法相比本发明中的识别器的识别正确率在5db、10db、15db信噪比环境下分别提高1.77%、2.12%、1.88%,说明在低信噪比的环境下,基于gan的降噪模块能有效地提高网络的识别率,且本发明方法使用了耦合的损失函数,使生成器在对含噪hrrp进行降噪时,保留了对识别有用的特征,能在低信噪比环境下达到更好的识别性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。