1.本文涉及医疗设备技术,尤指一种阻尼铰链结构、一种机械臂和一种用于穿刺手术的机器人。
背景技术:
2.肿瘤是指机体细胞在各种促突变因素作用下,局部组织细胞发生突变,不断恶性增生所形成的新组织,根据其对机体的危害程度,又可将其分为良性肿瘤和恶性肿瘤两大类,其中恶性肿瘤也被称为癌症。
3.虽然肿瘤疾病严重的危害着人类的健康及生命,但肿瘤的发现时期、正确的诊断方式和及时的治疗对其治愈有着至关重要的影响。可以说,越早对肿瘤进行确认,患者的生存率越高。判断某一组织是否为肿瘤的金标准是病理诊断,其通过提取病灶处组织,对病灶处组织进行一些列处理和观察,从而判断该组织是否为肿瘤,或该组织为肿瘤的哪一发展阶段。
4.穿刺活检手术是获取病理诊断的主要途径,具体手术过程包括:
5.首先,通过光学检测装置扫描手术床上的光学标记物、ct设备(computed tomography,电机计算机断层扫面设备,简称为ct)上的光学标记物、安装在驱动装置上的末端执行器上的光学标记物建立刚体,由预设算法确定末端执行器、手术床、ct的相对空间位置。
6.然后,ct再扫描人体获得病症位置,光学检测装置再扫描放置于患者身体上的呼吸标记物,由显示装置显示患者呼吸状态波浪线,医生指导患者根据波浪线调整呼吸,使呼吸状态波浪线保持平稳的波动状态,控制装置再通过算法减少或排除由于呼吸造成的病症位置波动幅度,再由显示装置显示出人体病症影像图,然后在人体病症影像图上规避血管和骨骼等人体组织,规划出穿刺点、穿刺路径,此时显示装置显示人体病症影像图、穿刺点和穿刺路径等。
7.再者,驱动装置将末端执行器移动至穿刺点,然后末端执行器驱动其上的穿刺针进行穿刺动作,穿刺完成后末端执行器释放穿刺针并撤离,穿刺针则保持在穿刺位置上、并随患者进行ct扫描获取穿刺影像,显示装置显示穿刺影像,医生根据穿刺影像判断穿刺针是否穿刺到位,若穿刺针未穿刺到位则需要重新进行手术过程。
8.其中,光学检测装置固定在机械臂的末端,由于机械臂的长度达到几米,光学检测装置在通过机械臂调整位置的过程中,其振动幅度大、振动时间久,影响光学检测装置扫面光学标记物的精准。
技术实现要素:
9.本技术提供了一种阻尼铰链结构,应用于机械臂,可以解决光学检测装置在通过机械臂调整位置的过程中,其振动幅度大、振动时间久,影响光学检测装置扫面光学标记物的精准的问题。
10.本技术还提供了一种机械臂和一种用于穿刺手术的机器人。
11.本技术提供了一种阻尼铰链结构,包括:第一铰链组件,设有第一连接部;第二铰链组件,设有第二连接部,所述第一铰链组件和所述第二铰链组件铰接连接;弹性阻尼件,支撑在所述第一铰链组件和所述第二铰链组件之间、并在所述第一铰链组件和所述第二铰链组件之间形成阻尼力;和定位组件,安装在所述第一铰链组件和所述第二铰链组件中的一个上、并与所述第一铰链组件和所述第二铰链组件中的另一个相配合,用于定位所述第一铰链组件和所述第二铰链组件,实现所述第一连接部相对于所述第二连接部定位在设定位置。
12.在一示例性实施例中,所述阻尼铰链结构还包括:限位盘,所述第一铰链组件设有朝向所述第二铰链组件凸起的环形的配合轴,所述第二铰链组件设有配合孔,所述配合孔包括第一孔段,所述配合轴穿设在所述第一孔段内,所述限位盘位于第二铰链组件的背向所述第一铰链组件的一侧、并与所述配合轴固定连接,用于阻止所述配合轴反向脱出所述第一孔段。
13.在一示例性实施例中,所述配合轴上套设有两个弹性阻尼件,所述第一孔段位于两个所述弹性阻尼件之间,所述配合轴的外侧面凸设有环形的止挡部,所述第一孔段位于所述止挡部和所述限位盘之间,一个所述弹性阻尼件压持在所述止挡部和所述第一孔段的朝向所述止挡部的外端面之间,另一个所述弹性阻尼件压持在所述限位盘和所述第一孔段的朝向所述限位盘的外端面之间。
14.在一示例性实施例中,所述第一铰链组件包括:第一轴座,所述第一轴座设有第一通孔,所述第一通孔的内部凸设有环形的第一安装台,所述第一连接部位于所述第一轴座上;和第一套筒,位于所述第一轴座和所述第二铰链组件之间,所述第一套筒的外侧面凸设有环形的第二安装台,所述第一套筒的背向所述第二铰链组件的一端伸入所述第一通孔内,所述第二安装台固定在所述第一安装台上,所述配合轴位于所述第一套筒上,所述止挡部位于所述第二安装台上。
15.在一示例性实施例中,所述第二铰链组件包括:第二轴座,所述第二轴座设有第二通孔,所述第二通孔的内部凸设有环形的第五安装台,所述第二连接部位于所述第二轴座上;和第二套筒,位于所述第一套筒和所述第二轴座之间,所述第二套筒的外侧面凸设有环形的第三安装台,所述第二套筒的背向所述第一轴座的一端伸入所述第二套筒内,所述第三安装台固定在所述第五安装台上,第二轴座和第二套筒共同构造出所述配合孔。
16.在一示例性实施例中,所述第一套筒的伸入所述第二套筒内部的一端的内侧面上凸设有环形的第四安装台,所述限位盘位于所述第二套筒的背向所述第一轴座的一侧、并固定在所述第四安装台上。
17.在一示例性实施例中,所述定位组件包括安装座、定位销、复位弹簧和驱动件,所述配合孔还包括第二孔段,所述第二孔段位于所述第一孔段的背向所述第一铰链组件的一侧,所述限位盘和所述安装座均位于所述第二孔段内,所述安装座固定在所述第二孔段的孔壁上,所述安装座设有盲孔,所述盲孔位于所述限位盘的背向所述第一铰链组件的一侧,所述限位盘设有插孔,所述定位销置于所述盲孔内、并将所述复位弹簧压持在所述盲孔的孔底,所述定位销的伸出所述盲孔的一端朝向所述第一铰链组件侧伸入所述插孔内,所述驱动件穿设在所述第二孔段的孔壁和所述安装座上,所述驱动件的伸入所述安装座内的一
端与所述定位销相配合,用于解卡所述定位销和所述插孔,所述驱动件的另一端外露。
18.在一示例性实施例中,所述驱动件的伸入所述安装座内的一端设有驱动斜面,所述定位销设有配合斜面,所述驱动斜面与所述配合斜面相配合,朝向所述安装座按压所述驱动件的另一端,所述驱动斜面压持所述配合斜面,使得所述定位销背向所述限位盘移动而缩入所述盲孔内,实现解卡所述定位销和所述插孔。
19.在一示例性实施例中,所述限位盘设有限位凸台,所述安装座用于在所述限位凸台沿所述第二铰链组件的周向转动的过程中,通过阻挡所述限位凸台来对所述限位凸台进行限位。
20.在一示例性实施例中,所述插孔包括第一插孔和两个第二插孔,所述限位凸台和所述第一插孔位于两个所述第二插孔的两侧,且两个所述第二插孔关于所述第一插孔对称布置,每个所述第二插孔和所述第一插孔所夹的中心角为150~170度。
21.在一示例性实施例中,所述插孔包括第一插孔、第三插孔和两个第二插孔,所述第一插孔和所述限位凸台位于两个所述第二插孔的一侧,所述第三插孔位于两个所述第二插孔的另一侧,且两个所述第二插孔关于所述第一插孔对称布置,每个所述第二插孔和所述第一插孔所夹的中心角为125~145度,所述第一插孔和所述第三插孔所夹的中心角不小于170度。
22.在一示例性实施例中,所述插孔包括第一插孔、两个第二插孔和两个第三插孔,两个所述第二插孔和两个所述第三插孔均关于所述第一插孔对称设置,且所述第二插孔位于所述第一插孔和所述第三插孔之间,所述限位凸台位于两个所述第三插孔之间,每个所述第二插孔和所述第一插孔所夹的中心角为55~75度,每个所述第三插孔和所述第一插孔所夹的中心角为125~145度。
23.在一示例性实施例中,所述插孔包括第一插孔、两个第二插孔和两个第三插孔,两个所述第二插孔和两个所述第三插孔均关于所述第一插孔对称设置,且所述第二插孔位于所述第一插孔和所述第三插孔之间,所述限位凸台位于两个所述第三插孔之间,每个所述第二插孔和所述第一插孔所夹的中心角为80~100度,每个所述第三插孔和所述第一插孔所夹的中心角为100~120度。
24.在一示例性实施例中,所述第一连接部位于所述第一铰链组件的侧面,所述第二连接部位于所述第二铰链组件的侧面。
25.在一示例性实施例中,所述第一连接部位于所述第一铰链组件的背向所述第二铰链组件的端部,所述第二连接部位于所述第二铰链组件的侧面。
26.本发明实施例提供的机械臂,包括通过阻尼铰链结构依次铰接连接的支撑臂、多个子臂和连接臂,所述阻尼铰链结构包括上述任一实施例所述的阻尼铰链结构。
27.在一示例性实施例中,多个所述子臂为在上下方向依次设置的三个所述子臂。
28.本发明实施例提供的用于穿刺手术的机器人,包括上述任一实施例所述的机械臂。
29.与相关技术相比,本技术提供的阻尼铰链结构,第一铰链组件和第二铰链组件铰接连接,弹性阻尼件支撑在第一铰链组件和第二铰链组件之间、并在第一铰链组件和第二铰链组件之间形成阻尼力,该阻尼铰链结构应用于机械臂,弹性阻尼件可以减小机械臂关节处的振动和晃动,因此光学检测装置在通过机械臂调整位置的过程中,其振动次数和振
动幅度更小,振动时间更短,可以更好地保证光学检测装置扫面光学标记物的精准。
30.再者,定位组件安装在第一铰链组件和第二铰链组件中的一个上、并与第一铰链组件和第二铰链组件中的另一个相配合,用于定位第一铰链组件和第二铰链组件,实现第一连接部相对于第二连接部定位在设定位置,避免第一铰链组件和第二铰链组件在调整到设定位置后发生相对转动。
31.本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
附图说明
32.附图用来提供对本技术技术方案的理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
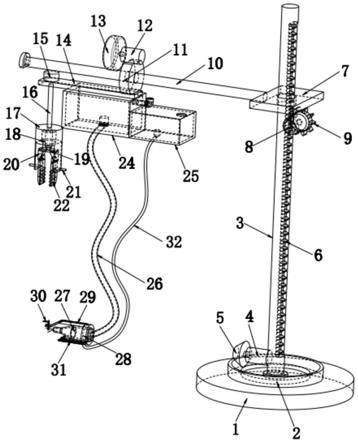
33.图1为本发明一实施例所述的穿刺系统的立体结构示意图;
34.图2为图1中机器人一视角的立体结构示意图;
35.图3为图1中机器人另一视角的立体结构示意图;
36.图4为图2中第二机械臂一使用状态的立体结构示意图;
37.图5为图2中第二机械臂另一使用状态的局部结构示意图;
38.图6为图2中第二机械臂的剖视结构局部示意图;
39.图7为图2中一阻尼铰链结构的分解结构示意图;
40.图8为图2中位于下方的两个子臂之间的阻尼铰链结构的剖视结构示意图;
41.图9为图7中第一轴座或第二轴座的立体结构示意图;
42.图10为图7中第二套筒的立体结构示意图;
43.图11为图7中第一套筒的立体结构示意图;
44.图12a~图12d为四种限位盘的立体结构示意图;
45.图13为图7中安装座的立体结构示意图;
46.图14为图7中定位销的立体结构示意图;
47.图15为图7中驱动件的立体结构示意图;
48.图16为机器人相对于手术床在初始状态的俯视结构示意图;
49.图17为机器人相对于手术床在检测状态的俯视结构示意图;
50.图18为机器人相对于手术床在监控状态的俯视结构示意图。
51.其中,图1至图18中附图标记与部件名称之间的对应关系为:
52.10机器人,100主体,110电动支撑机构,120脚轮,130电源接口,140散热口,150拉手,200第一机械臂,300末端执行器,400第二机械臂,410支撑臂,411内筒,412外筒,420调节臂,421子臂,430第一连接臂,440第一安装座,450安装臂,460第二连接臂,470第二安装座,480阻尼套,500光学检测装置,600显示装置,700ct,800手术床,900阻尼铰链结构,910第一铰链组件,911第一连接部,912第一轴座,913第一安装台,914第一套筒,915第二安装台,916第四安装台,920第二铰链组件,921第二连接部,922第二轴座,923第五安装台,924第二套筒,925第三安装台,926第一孔段,927第二孔段,930弹性阻尼件,940定位组件,941安装座,942定位销,943驱动件,950限位盘,951第一插孔,952第二插孔,953第三插孔,954
限位凸台。
具体实施方式
53.本技术描述了多个实施例,但是该描述是示例性的,而不是限制性的,并为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
54.如图1至图3所示,本技术提供了一种用于穿刺手术的机器人10,用于与ct700和手术床800配合使用,包括:控制装置,主体100,控制装置位于主体100内部;第一机械臂200,设置在主体100上、并与控制装置电连接;末端执行器300,设置在第一机械臂200上,第一机械臂200用于在控制装置的控制下调整末端执行器300的空间位置;第二机械臂400,设置在主体100上;和检测装置,设置在第二机械臂400上,第二机械臂400用于调整检测装置的空间位置。
55.该机器人10,将控制装置、设置有末端执行器300的第一机械臂200和设置有检测装置的第二机械臂400集成在主体100上,相对于控制装置、设置有末端执行器300的第一机械臂200和设置有检测装置的第二机械臂400相互独立分散布置,该机器人10占用手术室区域更小,更利于穿刺活检手术顺利进行。
56.其中,穿刺针通过末端执行器300进行手动穿刺或自动穿刺,末端执行器300引导穿刺针的穿刺方向,改善穿刺针在穿刺过程中发生的偏移问题。
57.在一示例性实施例中,如图2和图3所示,机器人10还包括:支撑装置,设置在主体100的下部,用于与放置主体100的承载面(一般为手术室的地面)相配合,以防止主体100在承载面上晃动,更好地保持主体100的稳定性,消除机器人10晃动对穿刺手术产生的不利影响。
58.在一示例中,如图2和图3所示,支撑装置为多个电动支撑机构110,多个电动支撑机构110均布设置在主体100的底面、并均与控制装置电连接,通过控制装置控制电动支撑机构110伸出和收起,操作更简单。其中,多个电动支撑机构110可以是三个、四个或五个等,均可实现本技术的目的,其宗旨未脱离本发明的设计思想,在此不再赘述,均应属于本技术的保护范围内。
59.在一示例中,如图2和图3所示,机器人10还包括:多个脚轮120,设置在主体100的下部,用于实现机器人10推行。机器人10推行到指定位置后,多个电动支撑机构110伸出,将主体100平稳固定在承载面上,确保机器人10处于可接受偏摆角度范围内,当手术完成后,多个电动支撑机构110收起,再将机器人10推走。
60.其中,多个脚轮120可以是均布设置的三个、四个或五个等,均可实现本技术的目的,其宗旨未脱离本发明的设计思想,在此不再赘述,均应属于本技术的保护范围内。
61.在一示例中,如图1至图3所示,机器人10还包括:显示装置600,设置在第二机械臂400上、并与控制装置电连接,且显示装置600和控制装置之间的连接线路、检测装置与控制装置之间的连接线路均穿设在第二机械臂400内,避免连接线路外露,降低机器人10护理和消毒难度。
62.在一示例中,如图1至图3所示,检测装置为光学检测装置500,末端执行器300设有
光学标记物,光学检测装置500通过扫面末端执行器300上的光学标记物、ct700上的光学标记物和手术床800上的光学标记物建立刚体,由预设算法确定末端执行器300、手术床800、ct700的相对空间位置。第一机械臂200为六轴机械臂,六轴机械臂定位精准,能够适用于无菌环境。末端执行器300与控制装置电连接、并设有激光定位机构,激光定位机构在穿刺手术过程中给予医护人员明确的手术操作位置,可以有效提升穿刺针的穿刺成功率和穿刺效率。
63.在一示例中,如图2和图3所示,主体100还设有电源接口130、散热口140和拉手150等,电源接口130通过电源线与市供电源连接导通,通过市供电源向机器人10进行供电。
64.在一示例性实施例中,如图4至图6所示,第二机械臂400包括支撑臂410、调节臂420、第一连接臂430和第一安装座440,支撑臂410的下端连接在主体100上,调节臂420的下端与支撑臂410的上端通过阻尼铰链结构进行铰接连接,调节臂420的上端与第一连接臂430的下端通过阻尼铰链结构进行铰接连接,第一安装座440通过阻尼铰链结构铰接在第一连接臂430的上端,光学检测装置500可拆卸地安装在第一安装座440上。
65.通过第二机械臂400调整光学检测装置500的位置,光学检测装置500自上而下扫描光学标记物,以此来改善医护人员和光学检测装置500相互遮挡的问题,有利于医护人员顺利进行手术操作;再者,机器人10工作状态下基本不存在震动,阻尼铰链结构能够保证光学检测装置500定位后位置稳定,因此光学检测装置500的检测精度更高。
66.在一示例中,如图4至图6所示,第二机械臂400还包括安装臂450、第二连接臂460和第二安装座470,安装臂450水平布置在支撑臂410的一侧,安装臂450的一端通过阻尼铰链结构铰接在支撑臂410上,第二连接臂460的一端通过阻尼铰链结构铰接在安装臂450的另一端,第二安装座470通过阻尼铰链结构铰接在第二连接臂460的另一端,显示装置600可拆卸地安装在第二安装座470上。显示装置600通过安装臂450、第二连接臂460和第二安装座470进行位置调节,实现调节到更利于医护人员观察的位置,这样有利于穿刺手术更顺利进行。
67.在一实施例中,如图6所示,支撑臂410包括内筒411和外筒412,外筒412套设在内筒411外,安装臂450通过阻尼铰链结构铰接在外筒412上,显示装置600和控制装置之间的连接线路经过内筒411和外筒412之间的间隙、安装臂450的内部和第二连接臂460的内部到达第二安装座470,最终与显示装置600相连接。
68.在一实施例中,如图2至图6所示,支撑臂410竖直布置,调节臂420包括通过阻尼铰链结构依次铰接连接的多个子臂421,多个子臂421上下间隔设置,每个子臂421、安装臂450、第二连接臂460均水平布置,位于最下方的子臂421的自由端与支撑臂410的上端通过阻尼铰链结构铰接连接,第一连接臂430的下端与位于最上方的子臂421的自由端通过阻尼铰链结构铰接连接。光学检测装置500和控制装置之间的连接线路经过内筒411的内部、各个子臂421的内部和第一连接臂430的内部到达第一安装座440,最终与光学检测装置500相连接。
69.在一实施例中,如图4和图5所示,多个子臂421为三个,位于下方的两个子臂421的长度相同,位于上方的一个子臂421的长度小于位于下方的两个子臂421的长度。如图7至图15所示,三个子臂421之间的阻尼铰链结构900、位于最下方的子臂421的自由端与支撑臂410的上端之间的阻尼铰链结构900以及第一连接臂430的下端与位于最上方的子臂421的
自由端之间的阻尼铰链结构900,该四个阻尼铰链结构900,每个阻尼铰链结构900均包括第一铰链组件910、第二铰链组件920、弹性阻尼件930和定位组件940,第一铰链组件910和第二铰链组件920铰接连接,第一铰链组件910设有第一连接部911,第二铰链组件920设有第二连接部921,弹性阻尼件930支撑在第一铰链组件910和第二铰链组件920之间、并在第一铰链组件910和第二铰链组件920之间形成阻尼力,定位组件940安装在第一铰链组件910和第二铰链组件920中的一个上、并与第一铰链组件910和第二铰链组件920中的另一个相配合,用于定位第一铰链组件910和第二铰链组件920,实现第一连接部911相对于第二连接部921定位在设定位置。弹性阻尼件930能够减小震动,这样第二机械臂400在使用过程中光学检测装置500位置的振动次数更少、振动时间更短、振动幅度也更小,光学检测装置500的检测精度更高。另外,弹性阻尼件930在磨损后进行弹性补偿,始终保持能够形成阻尼力。
70.在一实施例中,如图7、图8、图12a至图12d所示,每个阻尼铰链结构900还均包括限位盘950,第一铰链组件910设置有朝向第二铰链组件920凸起的环形的配合轴,第二铰链组件920设有配合孔,配合孔包括第一孔段926,配合轴穿设在第一孔段926内,限位盘950位于第二铰链组件920的背向第一铰链组件910的一侧、并与配合轴固定连接,限位盘950的边缘径向向外凸出配合轴,阻止配合轴反向脱出第一孔段926。
71.在一实施例中,如图7和图8所示,配合轴上套设有两个弹性阻尼件930,第一孔段926位于两个弹性阻尼件930之间,配合轴的外侧面凸设有环形的止挡部(可以是轴肩),第一孔段926位于止挡部和限位盘950之间,一个弹性阻尼件930压持在止挡部和第一孔段926的朝向止挡部的外端面之间,另一个弹性阻尼件930压持在限位盘950和第一孔段926的朝向限位盘950的外端面之间。
72.在一实施例中,如图7至图11所示,第一铰链组件910包括:第一轴座912,第一轴座912设有上下贯通的第一通孔,第一通孔的内部凸设有环形的第一安装台913,第一连接部911位于第一轴座912上;第一套筒914,位于第一轴座912和第二铰链组件910之间,第一套筒914的外侧面凸设有环形的第二安装台915,第一套筒914的背向第二铰链组件920的一端伸入第一通孔内,第二安装台915通过螺钉固定在第一安装台913上,配合轴位于第一套筒914上,止挡部位于第二安装台915上。第二铰链组件920包括:第二轴座922,第二轴座922设有上下贯通的第二通孔,第二通孔的内部凸设有环形的第五安装台923,第二连接部921位于第二轴座922上;第二套筒924,位于第一套筒914和第二轴座922之间,第二套筒924的外侧面凸设有环形的第三安装台925,第二套筒924的背向第一轴座912的一端伸入第二套筒924内,第三安装台925通过螺钉固定在第五安装台923上,第二轴座922和第二套筒924共同构造出配合孔;第一套筒914的伸入第二套筒924内部的一端的内侧面上凸设有环形的第四安装台916,限位盘950位于第二套筒92的背向第一轴座912的一侧、并通过螺钉固定在第四安装台916上。
73.在一实施例中,如图7、图8、图12a至图15所示,定位组件940包括安装座941、定位销942、复位弹簧和驱动件943,配合孔还包括第二孔段927,第二孔段927位于第一孔段926的背向第一轴座912的一侧,第二孔段927的内径大于第一孔段926的内径,限位盘950和安装座941均位于第二孔段927内,安装座941固定在第二孔段927的孔壁上,安装座941设有盲孔,盲孔位于限位盘950的背向第一轴座912的一侧,限位盘950设有插孔,定位销942置于盲孔内、并将复位弹簧压持在盲孔的孔底,定位销942的伸出盲孔的一端朝向第一轴座912侧
伸入插孔内,驱动件943穿设在第二孔段927的孔壁和安装座941上,而且驱动件943的伸入安装座941内的一端与定位销942相配合,用于解卡定位销942和插孔,驱动件943的另一端外露。其中,驱动件943的伸入安装座941内的一端设置有驱动斜面,定位销942设置有配合斜面,驱动斜面与配合斜面相配合,朝向安装座941按压驱动件943的另一端,驱动斜面压持配合斜面,使得定位销942背向限位盘950移动而缩入盲孔内,实现解卡定位销942和插孔。
74.其中,如图12a至图12d所示,插孔包括对应于初始状态的第一插孔951、对应于检测状态的第二插孔952和对应于监控状态的第三插孔953,第二轴座922上设置有与第一插孔951、第二插孔952和第三插孔953相对应的图形标识,第二插孔952包括两个,两个第二插孔952关于第一插孔951对称设置,第三插孔953也包括两个,两个第三插孔953也关于第一插孔951对称设置,这样布置可以满足机器人10在手术床800长度方向的两侧均可使用(机器人10在手术床800的两侧均可以相对于手术床800调整至初始状态、检测状态和监控状态),如图8、图12a至图12d所示,限位盘设有限位凸台954,限位凸台954与安装座941相配合,限位凸台954转动至安装座941时,安装座941阻挡限位凸台954,限位凸台954无法越过安装座941而继续转动,此结构可避免连接线路扭曲、损坏。
75.可以是,如图4和图5所示,第一连接部911位于第一轴座912的侧面,第二连接部921位于第二轴座922的侧面,相邻子臂421通过该种阻尼铰链结构900相连接;或者可以是,如图4和图5所示,第二连接部921位于第二轴座922的侧面,第一连接部911位于第一轴座912的背向第二轴座922的端部,位于最下方的子臂421的自由端与支撑臂410的上端、第一连接臂430的下端与位于最上方的子臂421的自由端均通过该种阻尼铰链结构900相连接;或者可以是,第一连接部911和第二连接部921位于第一轴座912和第二轴座922相背的端部(此方案图中未示出);以上均可实现本技术的目的,其宗旨未脱离本发明的设计思想,在此不再赘述,均应属于本技术的保护范围内。
76.如图4、图5、图7和图8所示,第一连接部911和第二连接部921均为用于进行插接固定连接的连接筒,这样连接线路可以在阻尼铰链结构900内部进行穿设布线,三个子臂421的摆动方向相对于水平面平行。
77.如图12a所示,支撑臂310和最下方的子臂321之间的阻尼铰链结构900,其限位盘950上的插孔包括第一插孔951和两个第二插孔952(无第三插孔),限位凸台954和第一插孔951位于两个第二插孔952的两侧,且两个第二插孔952关于第一插孔951对称布置,每个第二插孔952和第一插孔951所夹的中心角为150~170度(如159度),且第一连接部911位于第一轴座912的背向第二轴座922的端部,第二连接部921位于第二轴座922的侧面。
78.如图12b所示,位于下方的两个子臂421之间的阻尼铰链结构900,其限位盘950上的插孔包括第一插孔951、第三插孔953和两个第二插孔952,也就是两个第三插孔953的位置重合,每个第二插孔952和第一插孔951所夹的中心角为125~145度(如136度),此时第三插孔953与第一插孔951间隔不小于170度(如180度),限位凸台954位于第三插孔953和其中一个第二插孔952之间(此限位盘950的结构图中未示出),且第一连接部911位于第一轴座912的侧面,第二连接部921位于第二轴座922的侧面。
79.如图12c所示,位于上方两个子臂421之间的阻尼铰链结构900,其限位盘950上的插孔包括第一插孔951、两个第二插孔952和两个第三插孔953,两个第二插孔952和两个第三插孔953均关于第一插孔951对称设置,且第二插孔952位于第一插孔951和第三插孔953
之间,限位凸台954位于两个第三插孔953之间,每个第二插孔952和第一插孔951所夹的中心角为55~75度(如65度),每个第三插孔953和第一插孔951所夹的中心角为125~145度(如133度),且第一连接部911位于第一轴座912的侧面,第二连接部921位于第二轴座922的侧面。
80.如图12d所示,最上方的子臂421和连接臂430之间的阻尼铰链结构900,其限位盘950上的插孔包括第一插孔951、两个第二插孔952和两个第三插孔953,两个第二插孔952和两个第三插孔953均关于第一插孔951对称设置,且第二插孔952位于第一插孔951和第三插孔953之间,限位凸台954位于两个第三插孔953之间,每个第二插孔952和第一插孔951所夹的中心角为80~100度(如90度),每个第三插孔953和第一插孔951所夹的中心角为100~120度(如111.5度),且第一连接部911位于第一轴座912的背向第二轴座922的端部,第二连接部921位于第二轴座922的侧面。
81.在一实施例中,如图2至图6所示,第二安装座470和第二连接臂460之间的铰接轴、第一安装座440和第一连接臂430之间的铰接轴均水平布置;支撑臂410和调节臂420之间的铰接轴、支撑臂410和安装臂450之间的铰接轴、安装臂450和第二连接臂460之间的铰接轴、相邻子臂421之间的铰接轴、调节臂420和第一连接臂430之间的铰接轴均竖直布置。
82.通过改变安装臂450、第二连接臂460和第二安装座470的姿态来调整显示装置600的摆放位置及角度;通过改变调节臂420、第一连接臂430和第一安装座440的姿态来调整光学组件的摆放位置及角度。阻尼铰链结构旋转后结构稳定,保证安装在第二机械臂400上的光学检测装置500位置稳定,有利于提高光学检测装置500采集光学数据的精度和效率。
83.如图4、图5、图12a至图12d、图16所示,调节第二机械臂400处于初始状态(定位销942卡入第一插孔951):三个子臂421收起而上下罗列、并布置成沿第一水平方向(即:位于最下方的子臂421与第一水平方向之间的夹角为-10~10度(如0度),位于中间的子臂421与第一水平方向之间的夹角为170~190度(如180度),位于最上方的子臂421与第一水平方向之间的夹角为-10~10度(如0度)),第一连接臂430在水平面内的投影与第一水平方向之间的夹角为80~100度(如90度)。手术过程中,手术台800仅配备一台机器人10即可,图16中示出了两个机器人10仅是为了说明同一个机器人10在手术台800两侧均可以放置,安装臂450可以进行180度旋转,图16中手术台800上的箭头表示第一水平方向。
84.如图4、图5、图12a至图12d、图17所示,第二机械臂400处于检测状态(定位销942卡入一个第二插孔952):三个子臂421打开,位于最下方的子臂421与第一水平方向之间的夹角为朝向手术床800偏转10~30度(如21度),位于中间的子臂421与第一水平方向之间的夹角为朝向手术床800偏转55~75度(如65度),位于最上方的子臂421与第一水平方向之间的夹角为170~190度(如180度),第一连接臂430在水平面内的投影与第一水平方向之间的夹角为170~190度(如180度)。手术过程中,手术台800仅配备一台机器人10即可,图17中示出了两个机器人10仅是为了说明同一个机器人10在手术台800两侧均可以放置,安装臂450可以进行180度旋转,图17中手术台800上的箭头表示第一水平方向。
85.如图4、图5、图12a至图12d、图18所示,第二机械臂400处于监控状态(定位销942卡入一个第三插孔953,无第三插孔953的阻尼铰链结构900则卡入第二插孔952内,也就是第二插孔952与第三插孔953重合):三个子臂421打开,位于最下方的子臂421与第一水平方向之间的夹角为朝向手术床800偏转10~30度(如21度),位于中间的子臂421与第一水平方向
之间的夹角为朝向手术床800偏转10~30度(如21度),位于最上方的子臂421与第一水平方向之间的夹角为60~80度(如68.5度),第一连接臂430在水平面内的投影与第一水平方向之间的夹角为170~190度(如180度)。手术过程中,手术台800仅配备一台机器人10即可,图18中示出了两个机器人10仅是为了说明同一个机器人10在手术台800两侧均可以放置,安装臂450可以进行180度旋转,图18中手术台800上的箭头表示第一水平方向。
86.其中,第一水平方向与手术床800的长度方向平行,且为自手术床800的后部向手术床800的前部的方向。
87.如图1至图3所示,该机器人配合ct和手术床,辅助医护人员进行穿刺活检手术,可以提高穿刺针穿刺的精准性和成功率,减少穿刺针对患者的创伤,可达到缩短手术时间,降低手术费用的目的。
88.本技术实施例中的各个阻尼铰链结构,本领域的技术人员可以根据实际需要进行合理设定,可以是各个阻尼铰链结构的结构完全相同,可以是各个阻尼铰链结构的结构不完全相同,可以是各个阻尼铰链结构的结构完全不相同,均可实现本技术的目的,其宗旨未脱离本发明的设计思想,在此不再赘述,均应属于本技术的保护范围内。
89.在一实施例中,如图6所示,安装臂450和外筒412之间设有阻尼套480,安装臂450和外筒412之间的阻尼铰链结构包括阻尼套480。如图5和图6所示,安装臂450和第二连接臂460之间的阻尼铰链结构、第二连接臂460和第二安装座470之间的阻尼铰链结构、第一连接臂430和第一安装座440之间的阻尼铰链结构包括调节螺栓和螺母,拧动调节螺栓可以调整相应的阻尼铰链结构的阻尼,调节螺栓拧得越紧则相应的阻尼铰链结构的阻尼越大,调节螺栓拧得越松则相应的阻尼铰链结构的阻尼越小。
90.本技术还提供了一种穿刺系统,包括ct700、手术床800和上述任一实施例所述的用于穿刺手术的机器人10,检测装置通过检测ct700、手术床800和末端执行器建立刚体,由预设算法确定ct700、手术床800和末端执行器的相对空间位置。
91.该穿刺系统,具备上述任一实施例提供的用于穿刺手术的机器人10的全部优点,在此不再赘述。
92.在一示例中,检测装置为光学检测装置500,末端执行器300设有光学标记物,ct700设有光学标记物,手术床800设有光学标记物,光学检测装置500通过扫面末端执行器300上的光学标记物、ct700上的光学标记物和手术床800上的光学标记物建立刚体,由预设算法确定末端执行器300、手术床800、ct700的相对空间位置。
93.综上所述,阻尼铰链结构应用于机械臂,弹性阻尼件可以减小机械臂关节处的振动和晃动,因此光学检测装置在通过机械臂调整位置的过程中,其振动次数和振动幅度更小,振动时间更短,可以更好地保证光学检测装置扫面光学标记物的精准。
94.再者,定位组件安装在第一铰链组件和第二铰链组件中的一个上、并与第一铰链组件和第二铰链组件中的另一个相配合,用于定位第一铰链组件和第二铰链组件,实现第一连接部相对于第二连接部定位在设定位置,避免第一铰链组件和第二铰链组件在调整到设定位置后发生相对转动。
95.在本发明中的描述中,需要说明的是,术语“上”、“下”、“一侧”、“另一侧”、“一端”、“另一端”、“边”、“相对”、“四角”、“周边”、
““
口”字结构”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指
的结构具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
96.在本发明实施例的描述中,除非另有明确的规定和限定,术语“连接”、“直接连接”、“间接连接”、“固定连接”、“安装”、“装配”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;术语“安装”、“连接”、“固定连接”可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
97.虽然本发明所揭露的实施方式如上,但所述的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。