1.本发明涉及三维重建装置,特别是涉及三维重建信息采集装置及位置获取方法,机械臂相关技术和室内智能小车以及自动化控制相关领域,属于自动化控制领域。
背景技术:
2.随着三维重建技术的发展,对三维重建信息采集的研究也成为了新的研究方向,实际的科学研究也越来越多的出现利用室内智能小车作为载体采集信息的情况。重建信息能否完备采集直接影响着重建的效果,决定了重建模型是否在实际应用场景具有被利用的价值。
3.传统的信息采集方法是利用人工手持摄像头的方法进行信息的采集。然而在某些场景下,如侦测存在未知危险情况的室内环境,无法使用人工方法进行重建信息的采集,需借助室内小车作为载体实现信息采集。以室内小车作为载体进行信息采集时,往往需要对作为采集装置的摄像头进行位置操纵,实现信息的完备采集,避免重建模型出现缺陷。
4.通过对小车、机械臂和摄像头俯仰装置的控制,使得摄像头能够运动到满足重建需求的信息采集位置,便能够实现信息的完备采集。有鉴于此,提出一种室内三维重建信息自动采集和控制装置与实现方法。
技术实现要素:
5.本发明目的在于解决传统的信息采集利用人工手持摄像头的方法进行信息的采集,侦测存在未知危险情况的室内环境,无法使用人工方法进行重建信息的采集的问题,提供了室内三维重建信息采集装置及装置摄像头位置获取方法。
6.室内三维重建信息采集装置,它包括小车车体、机械臂基座、机械臂旋转平台、升降装置驱动电机、升降装置、机械臂驱动电机、机械臂、摄像头俯仰电机、摄像头、旋转平台驱动电机和机械臂顶部平台;
7.机械臂基座固定安装在小车车体上,旋转平台驱动电机壳体安装在机械臂基座上,机械臂旋转平台安装在旋转平台驱动电机的输出轴上,升降装置驱动电机和升降装置固定安装在机械臂旋转平台上端面上,升降装置驱动电机通过连接杆与升降装置驱动端连接,机械臂顶部平台固定安装在升降装置顶端上,机械臂首端通过机械臂驱动电机安装在机械臂顶部平台上端面上,摄像头通过摄像头俯仰电机与机械臂末端固定连接,小车车体底部安装有多个麦克纳姆轮,车载控制装置安装在小车车体上,车载控制装置与升降装置驱动电机、机械臂驱动电机、摄像头俯仰电机、摄像头、旋转平台驱动电机和多个麦克纳姆轮连接。
8.室内三维重建信息采集装置摄像头位置获取方法,所述方法是按照以下步骤实现的:
9.步骤一:通过小车车体上麦克纳姆轮的编码电机获得小车车体的运动位置,并根据机械臂的安装位置确定机械臂基座的第一位置;
10.步骤二:根据机械臂本身机构利用标准d-h参数标定方法确定运动学相对关系,确定机械臂基座和机械臂末端之间的第一位置转换关系;
11.步骤三:基于机械臂基座和机械臂末端之间的第一位置转换关系和机械臂基座的第一位置,确定机械臂末端的第二位置;
12.步骤四:利用标准d-h参数标定方法获取摄像头位置相对于机械臂末端的运动学相对关系,从而获取机械臂末端和摄像头之间第二位置转换关系;
13.步骤五:根据步骤四机械臂末端的第二位置,基于获取机械臂末端和摄像头之间第二位置转换关系,获取摄像头的第三位置。
14.本发明最为突出的特点和显著的有益效果是:
15.1、本技术通过对小车车体、机械臂和摄像头俯仰电机的控制,使得摄像头能够运动到满足重建需求的信息采集位置,便能够实现信息的完备采集。
16.2.本技术为了实现对摄像头位置精确而快速的控制,首先得到机械臂基座和摄像头之间的位置转换关系,然后通过获取到的机械臂基座位置,并通过对机械臂基座和机械臂末端位置进行去噪处理,得到对应的摄像头位置以提高定位精度,并且利用此位姿信息作为反馈,对小车车体和机械臂以及摄像头俯仰电机进行下位控制,通过pid参数整定减少参数调整时间,提高控制效率。
附图说明
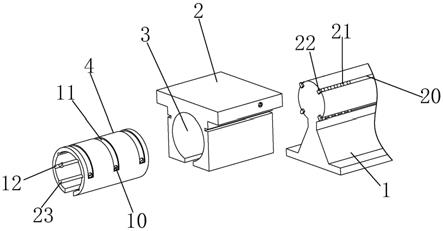
17.图1是本技术的整体结构示意图。
18.图2是本技术的整体结构示意图。
19.图3是摄像头位置获取方法流程图。
20.图4是机械臂系统控制方法一个实施例的方法示意图。
具体实施方式
21.具体实施方式一:结合图1-图2对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置,它包括小车车体1、机械臂基座2、机械臂旋转平台3、升降装置驱动电机4、升降装置5、机械臂驱动电机6、机械臂7、摄像头俯仰电机8、摄像头9、旋转平台驱动电机10和机械臂顶部平台11;
22.机械臂基座2固定安装在小车车体1上,旋转平台驱动电机10壳体安装在机械臂基座2上,机械臂旋转平台3安装在旋转平台驱动电机10的输出轴上,升降装置驱动电机4和升降装置5固定安装在机械臂旋转平台3上端面上,升降装置驱动电机4通过连接杆与升降装置5驱动端连接,机械臂顶部平台11固定安装在升降装置5顶端上,机械臂7首端通过机械臂驱动电机6安装在机械臂顶部平台11上端面上,摄像头9通过摄像头俯仰电机8与机械臂7末端固定连接,小车车体1底部安装有多个麦克纳姆轮,车载控制装置30安装在小车车体(1)上,车载控制装置30与升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8、摄像头9、旋转平台驱动电机10和多个麦克纳姆轮连接。麦克纳姆轮通过联轴器与编码电机连接。
23.具体实施方式二:结合图1-图2对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置,机械臂驱动电机6壳体固定安装在机械臂顶部平台11上端面上,机械臂驱动电机6输出轴与机械臂7首端固定连接,机械臂7末端与摄像头俯仰电机8壳体固定连
接,摄像头俯仰电机8输出轴与摄像头9固定连接。其它结构连接关系和具体实施方式一相同。
24.具体实施方式三:结合图1-图2对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置,升降装置5包括两组
‘
x’形剪叉连板,每组
‘
x’形剪叉连板包括两个
‘
x’形剪叉连板和多个连接杆,每组
‘
x’形剪叉连板上相对设置
‘
x’形剪叉连板中间转动轴通过连接杆连接,两组
‘
x’形剪叉连板由上至下竖直设置,位于上方一组
‘
x’形剪叉连板底端每侧的板体与下方对应一组
‘
x’形剪叉连板顶端一侧的板体通过连接杆转动连接,位于上方一组
‘
x’形剪叉连板顶端一侧板体与机械臂顶部平台11转动连接,位于上方一组
‘
x’形剪叉连板顶端另一侧板体与机械臂顶部平台11通过滑块滑动连接,位于下方一组
‘
x’形剪叉连板底端一侧板体与机械臂旋转平台3上的两个固定块转动连接,位于下方一组
‘
x’形剪叉连板顶端另一侧每个板体均与机械臂旋转平台3上的一个固定块上的滑柱固定连接,每个滑柱在固定块的滑槽上滑动连接,两个滑柱通过连接柱连接,升降装置驱动电机4输出轴与丝杠一端固定连接,丝杠与两个滑柱上的连接柱螺纹连接。其它结构连接关系和具体实施方式一相同。
25.具体实施方式四:结合图1-图4对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置摄像头位置获取方法,所述方法是按照以下步骤实现的:
26.步骤一:通过小车车体1上麦克纳姆轮的编码电机获得小车车体1的运动位置,或通过获取电机的角位移,从而根据轮子的参数计算出小车的位移和转向角度,并根据机械臂7的安装位置确定机械臂基座2的第一位置;
27.对车载传感器的信息处理可以通过选取编码电机作为小车的驱动电机,同时在车上安装惯性测量元件(imu),编码电机能够返回脉冲信号作为电机的反馈来源,能够与(imu)提供的位置信息进行信息融合,从而能够实现对驱动电机的高精度闭环控制,结合文中提到的粒子滤波方法进一步的提高小车的定位精度。
28.步骤二:根据机械臂本身机构利用标准d-h参数标定方法确定运动学相对关系,确定机械臂基座2和机械臂7末端之间的第一位置转换关系;
29.机械臂基座2和机械臂7末端之间的第一位置转换关系包括机械臂7末端相对于机械臂基座2的转换矩阵,可以通过机械臂7的几何参数,运用运动学原理计算得到。
30.步骤三:基于机械臂基座2和机械臂7末端之间的第一位置转换关系和机械臂基座2的第一位置,确定机械臂7末端的第二位置;
31.通过机械臂基座2和机械臂7末端之间的第一位置转换关系可以将机械臂基座2的位置矢量与机械臂7末端的位置建立一个可以求得的映射关系、从而通过位置转换关系得到机械臂7末端的第二位置。机械臂基座2的第一位置包括在以工作环境为基准的绝对坐标系之下的位置矢量返回的位置数据。
32.第二位置由公式:
33.p2=t1*p1或者p2=(t1)-1
*p1计算得到:
34.其中p2为第二位置,t1为第一位置转换关系,p1为第一位置。
35.步骤四:利用标准d-h参数标定方法获取摄像头9位置相对于机械臂7末端的运动学相对关系,从而获取机械臂7末端和摄像头9之间第二位置转换关系;
36.包括摄像头俯仰电机8相对于机械臂7末端的转换矩阵,通过摄像头俯仰电机8的
几何参数,运用运动学原理计算得到机械臂7末端和摄像头9之间第二位置转换关系。
37.步骤五:根据步骤四机械臂7末端的第二位置,基于获取机械臂7末端和摄像头9之间第二位置转换关系,获取摄像头9的第三位置。
38.将机械臂7末端的第二位置与摄像头俯仰电机8的位置建立一个可以求得的映射关系,从而通过机械臂7末端和摄像头9之间第二位置转换关系得到摄像头俯仰电机8的第三位置。
39.第三位置由公式:
40.p3=t2*p2或者p3=(t2)-1
*p2计算得到:
41.其中p3为第三位置,t2为第二位置转换关系,p2为第二位置。
42.本实施方式中通过信息采集的摄像头9和摄像头俯仰电机8安装在机械臂7末端上,机械臂基座2安装在小车车体1上获取各组件位置的方法。摄像头9通过摄像头俯仰电机8能够自主进行俯仰角调节,摄像头9进行深度信息采集,用于对工作环境进行拍摄,并将拍摄得到的图像信息和深度信息发送至车载控制装置30,升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8、旋转平台驱动电机10均使用自带的编码器输出脉冲作为运动信息。
43.具体实施方式五:结合图1-图4对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置的摄像头位置获取方法,步骤三中确定机械臂7末端的第二位置和机械臂基座2的第一位置采用粒子滤波算法进行去噪,由小车车体1上的麦克纳姆轮的编码电机产生的第一噪声项,利用所述第一噪声项对所述机械臂基座2的第一位置进行去噪处理,得到去噪处理后的机械臂基座2的第一位置,进而获取机械臂7末端的第二位置,机械臂7的运动由升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8和旋转平台驱动电机10由车载控制装置30控制,由升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8和旋转平台驱动电机10各自带的编码器产生的第二噪声项,因而第二噪声项可以用来对机械臂末端的第二位置进行去噪处理,并利用所述第二噪声项对所述机械臂7末端的第二位置进行去噪处理,得到去噪处理后的机械臂7末端的第二位置,进而获取摄像头9的第三位置在绝对坐标系下的位置。其它结构连接关系和具体实施方式四相同。
44.使用鲸群算法优化采样粒子滤波算法,对所述机械臂基座2的第一位置和机械臂7末端的第二位置进行处理,得到去噪处理后的机械臂基座2的第一位置和机械臂7末端的第二位置:
45.获取第一噪声项,并利用所述第一噪声项对所述第一位置进行去噪处理,得到去噪处理之后的所述第一位置。
46.考虑到利用运动学原理计算到的机械臂基座的第一位置中不可避免的会存在过程噪声,若不加以处理,噪声带来的偏差会随后续的位置转换不断扩大,因而,为提高第一位置准确度,在s201中,对第一位置进行去噪处理,以得到去噪处理之后的第一位置。
47.上述噪声可以为高斯噪声、均匀噪声或者其他的经验值、标定值等,其来源可以是运动过程中产生,也可以是在传感器处理位置关系过程中得到。
48.对第一位置的去噪处理流程如下:
49.首先,根据小车运动概率p(x0),得到代表描述小车运动的粒子集:其中代表小车在初始时刻,由第i个粒子的初始位置和各自的粒子权重ω组成的向量,粒子
对应的状态值为鲸群位置;
50.然后,在t时刻更新粒子权重值:对粒子权重进行随机扰动:生成两随机数rand1、rand2,且rand1,rand2~n(0,1),更新鲸群位置:
[0051][0052]
其中为新生成邻域位置,其对应粒子权重为
[0053]
比较和若则粒子的最佳位置x*更新为否则为
[0054]
更新粒子位置:生成一个独立的随机数p,且p~u(0,1),则t 1时刻的鲸群位置由以下公式得到:
[0055][0056]
其中a=a(2r
1-1),a为收敛因子,随着迭代次数的增加从2~0线性递减,r1~u(0,1),d=2r2x*
t-x
t
,r2~u(0,1),
[0057]
d’=x*
t-x
t
,b为模仿鲸鱼螺旋搜索猎物的系数,l~u(-1,1);
[0058]
考察是否达到最大迭代次数,若达到,则停止迭代,若未达到,则继续迭代;
[0059]
对其粒子权重进行归一化处理:
[0060]
得到t时刻小车未知量x的最小均方估计:
[0061]
重复上述过程至运动停止。
[0062]
获取第二噪声项,利用所述第二噪声项对所述第二位置进行去噪处理,得到去噪处理之后的第二位置,
[0063]
上述噪声可以为高斯噪声、均匀噪声或者其他的经验值、标定值等,其来源可以是运动过程中产生,也可以是在传感器处理位置关系过程中得到。按照所述第一噪声项对所述第一位置进行去噪处理,得到去噪处理之后的所述第一位置方式得到去噪处理之后的第二位置。
[0064]
车载控制装置30通过线缆或者无线通信的方式连接与摄像头9连接,车载控制装置30对摄像头9采集到的信息进行三维重建处理,并且计算出摄像头9的下一预期位置;车载控制装置30与小车车体1的麦克纳姆轮的编码电机、升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8、旋转平台驱动电机10连接并读取麦克纳姆轮的编码电机、升降装置驱动电机4的编码器、机械臂驱动电机6的编码器、摄像头俯仰电机8的编码器和旋转平台驱动电机10的编码器数据得到电机驱动各个组件的运动位置和运动过程,用于对机械臂基座,机械臂末端,摄像头俯仰装置的旋转角度进行测量。基于获取的位置和运动过程,根据运动关系计算机械臂基座,机械臂末端和摄像头俯仰装置在运动后的新位置;同时车载控制装置通过控制小车车体1的麦克纳姆轮的编码电机、升降装置驱动电机4的编码器、机械臂驱动电机6的编码器、摄像头俯仰电机8的编码器和旋转平台驱动电机10的编码器的运动数据,驱动电机带动小车车体1和机械臂7到达满足室内三维重建信息采集要求的位置。
[0065]
车载控制装置30还用于:获取第一噪声项,并利用所述第一噪声项对所述第一位
置进行去噪处理,得到去噪处理之后的所述第一位置;车载控制装置30还用于:
[0066]
获取第二噪声项,并利用所述第二噪声项对所述第二位置进行去噪处理,得到去噪处理之后的所述第二位置。
[0067]
具体实施方式六:结合图1-图4对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置的摄像头位置获取方法,所述方法是按照以下步骤实现的:
[0068]
根据去噪后的机械臂基座2的第一位置和机械臂7末端的第二位置通过公式计算得到摄像头的第三位置;
[0069]
流程如下:
[0070]
首先根据小车车体1和机械臂7运动概率p(x0),p(y0)得到代表描述小车车体1和机械臂7运动的粒子集:其中代表小车车体1和机械臂7在初始时刻,由第i个粒子的初始位置和各自的粒子权重ω组成的向量,粒子对应的状态值为鲸群位置;
[0071]
然后在t时刻更新粒子权重值:对粒子权重进行随机扰动:生成两随机数rand1、rand2,且rand1,rand2~n(0,1),更新鲸群位置:
[0072][0073]
其中为新生成邻域位置,其对应粒子权重为比较和若则粒子的最佳位置x*更新为否则为更新粒子位置:生成一个独立的随机数p,且p~u(0,1),则t 1时刻的鲸群位置由以下公式得到:
[0074][0075]
其中a=a(2r
1-1),a为收敛因子,随着迭代次数的增加从2~0线性递减,r1~u(0,1),
[0076]
d=2r2x*
t-x
t
,r2~u(0,1),
[0077]
d’=x*
t-x
t
,b为模仿鲸鱼螺旋搜索猎物的系数,l~u(-1,1);
[0078]
考察是否达到最大迭代次数,若达到,则停止迭代,若未达到,则继续迭代;
[0079]
对其粒子权重进行归一化处理:
[0080]
得到t时刻小车车体1未知量x的最小均方估计:
[0081]
同理按照以上方式得出机械臂7未知量y,进行滤波迭代去除噪声提高位置精度。
[0082]
具体实施方式七:结合图1-图4对本实施方式进行说明,本实施方式给出的室内三维重建信息采集装置的摄像头位置获取方法,所述机械臂控制方法通过对升降装置驱动电机4、机械臂驱动电机6、摄像头俯仰电机8和旋转平台驱动电机10利用pid控制方法进行控制,针对pid控制的k
p
,ki,kd三个参数,建立g(k
p
,ki,kd)函数,利用改进的花授粉算法进行参数整定,流程如下:
[0083]
确定花授粉算法的控制参数,即初始种群大小n,最大迭代次数gen
max
,转换概率p;
[0084]
初始化种群,即根据给定的上下界随机生成初始解x1,x2,x3,并计算其对应的初始
适应度值;
[0085]
从初始种群中寻找最佳解决方案,即根据适应度值寻找最佳解决方案g*,及其适应度f(g*);生成新的种群,生成公式如下:
[0086][0087]
其中随机参数l遵循位置参数为0,标度参数为1的levy分布,t为迭代次数,ξ~n(0,1),为第t次迭代后的xi值,为随机选取的异于的两个值,ε~u(0,1),根据经验,p取0.8;
[0088]
更新种群和最佳解决方案,根据适应度选择更好的新解决方案并保留下来;
[0089]
重复以上步骤直至达到最大迭代数,得出符合实际要求精度和控制速度的k
p
,ki,kd参数。其它方式和具体实施方式四相同。
[0090]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。