1.本发明涉及实验辅助装置,具体涉及一种小鼠尾静脉自动注射用药装置及其操作方法。
背景技术:
2.在动物实验中,为了观察药物对机体功能、代谢及形态引起的变化,常需要将药物注入动物体内。由于小鼠体积小、实验成本低、易于饲养,实验试剂使用量小,是最为常用的实验对象之一。小鼠给药方法通常有皮下注射、皮内注射、肌肉注射、腹腔注射和尾静脉注射。其中,小鼠尾静脉注射是常用的给药方式之一。但由于实验人员操作熟练程度不一,动物应激反应不同,常常会发生小鼠咬伤情况,从而影响实验人员健康;此外,某些实验需要大量样本,需要对多只老鼠进行注射用药,或者需要对多只小鼠进行多种药物的注射。可见,现有的大样本小鼠尾静脉注射实验注射效率低,对操作熟练程度要求高,不利于普通人员开展大样本实验。
3.中国专利cn213993823u公开了一种老鼠尾部血管显影辅助注射装置,该装置通过在底板上设置发光led灯珠,照射老鼠尾部从而辅助人眼进行查找血管,但是,该种方式采用人工注射,其鼠尾固定后无法实现调整,存在静脉注射失误率高、效率低等问题。
4.中国专利cn213883650u的公开了一种用于小动物尾静脉注射用的固定装置,该装置是一种固定小鼠的装置,可实现单人尾静脉注射实验,但该装置功能单一,只能实现小鼠的固定,注射过程需要人工完成,存在鼠尾固定后无法实现调整,尾静脉注射失误率高、效率低等问题。
5.综上所述,现有技术小鼠注射装置功能单一,仍存在注射效率低,注射失误率高、无法解决自动用药、实验数据自动记录等问题。
技术实现要素:
6.为解决现有技术中小鼠尾静脉注射效率低、失误率高、无法解决自动用药的问题,本发明提供一种小鼠尾部自动注射用药装置及其操作方法,该装置实现小鼠尾静脉自动注射用药,提高实验准确性和效率。
7.为实现以上发明目的,本发明的技术方案是:
8.一种小鼠尾静脉自动注射用药装置,包括底板和设置在底板上的固定单元、鼠尾位置调节单元、光学定位单元、注射单元、数据处理单元;所述固定单元用于实现小鼠的固定,包括固定管、固定螺栓和挡块;所述固定管的侧面设置有贯通的开槽,所述挡块设置在固定管的前端,用于限制小鼠移动,所述固定螺栓设置在固定管上,用于对挡块进行固定;所述鼠尾位置调节单元用于实现鼠尾的夹紧和鼠尾的位置调节,包括固定夹组件、限位托板组件、转动夹组件和旋转组件;所述固定夹组件位于固定单元的后端,包括上夹杆、下夹座、上夹支撑座、气缸和上夹连接杆;所述下夹座、上夹支撑座、气缸均设置在底板上;所述上夹杆的一端通过上夹连接杆与气缸的伸长杆铰接,中部与上夹支撑座铰接,另一端与下
夹座配合实现鼠尾根部的夹紧,且下夹座与上夹杆配合的端面设置有弧形夹紧槽;所述限位托板组件位于固定夹组件的后端,包括限位托板和托板安装座;所述托板安装座设置在底板上,所述限位托板设置在托板安装座上,且其表面设置有弧形固定槽,所述弧形固定槽的前端开口位置与弧形夹紧槽的开口位置相匹配,弧形固定槽的后端向下弯曲,同时,弧形固定槽的槽底设置有通光孔;所述旋转组件位于限位托板组件的后端,包括旋转连杆、轴承固定座、轴承、齿轮组和旋转驱动电机;所述旋转驱动电机设置在底板上,其输出轴通过齿轮组带动旋转连杆旋转,所述旋转连杆通过轴承设置在轴承固定座上,所述轴承固定座设置在底板上;所述转动夹组件位于限位托板组件和旋转组件之间,包括活动上夹板和半圆形下夹板;所述半圆形下夹板与旋转连杆连接,所述活动上夹板设置在半圆形下夹板的上方,且与半圆形下夹板实现鼠尾尾部的夹紧,同时能够在旋转组件的带动下,实现鼠尾的旋转;所述光学定位单元包括相机和光源;所述光源设置在限位托板通光孔的下方,光源发出的光穿过通光孔入射至鼠尾,所述相机设置在限位托板的上方,用于获取光照射条件下鼠尾透视图形,并判断静脉血管位置;所述注射单元位于鼠尾位置调节单元的后端,包括注射助推组件、入针助推组件、平移组件和止血组件;所述注射助推组件用于实现药物注射,所述入针助推组件用于完成注射器的入针;所述平移组件用于实现注射器横向平移,所述止血组件用于实现注射完成后的止血;所述数据处理单元用于实现鼠尾位置调节单元、光学定位单元、注射单元的控制以及数据记录。
9.进一步地,所述注射助推组件包括注射器、助推机构底板、针筒限位座、压帽固定卡和助推器;所述注射器的针筒通过针筒限位座设置在助推机构底板上,所述注射器的活塞杆压帽通过压帽固定卡与助推器的芯杆连接,所述助推器设置在助推机构底板上;所述入针助推组件包括导轨底座、滑台、助推步进电机和丝杠;所述滑台设置在导轨底座上方,且与丝杠螺纹连接,所述助推步进电机设置在导轨底座上,其输出轴与丝杠连接,带动滑台实现移动;所述平移组件包括平移螺母板、平移连接板、平移减速机和平移电机;所述平移电机的壳体通过平移连接板与滑台连接,所述平移电机的输出轴通过平移减速机与平移螺母板连接,且平移减速机的输出轴与平移螺母板螺纹连接,所述平移螺母板与助推机构底板连接,在平移电机的驱动下实现助推机构底板的横向平移;所述止血组件包括止血杆、止血垫、止血驱动电机和止血减速机;所述止血驱动电机的输出轴通过止血减速机与止血杆的一端连接,带动止血杆实现摆动,所述止血垫设置在止血杆的另一端,用于实现鼠尾注射后的止血。
10.进一步地,所述注射助推组件还包括针筒固定卡、前端限位开关、末端限位开关和助推固定片;所述前端限位开关和末端限位开关设置在助推机构底板上,用于限定注射器极限位置;所述针筒固定卡卡接在针筒限位底座上,用于对注射器进行固定,所述助推器通过助推固定片设置在助推机构底板上。
11.进一步地,所述平移组件还包括设置在平移连接板上的平移近端限位器和平移远端限位器,用于对助推机构底板的移动位置进行限定,助推机构底板上设有多个燕尾卡槽,并通过多个燕尾螺母将助推机构底板与滑台连接在一起,使得注射助推组件能够在滑台上横向平移。
12.进一步地,所述入针助推组件还包括光杠、前轻触开关和后轻触开关;所述光杠设置在导轨底座上,用于限定滑台滑动方向;所述前轻触开关和后轻触开关设置在导轨底座
上,用于限定滑台的运行范围,且后轻触开关还提供滑台起始运动的零位。
13.进一步地,所述止血组件还包括设置在止血减速机上的止血限位器和回零限位器,用于对止血杆的摆动位置实现限定。
14.进一步地,所述固定单元还包括设置在底板上的卡座和磁吸块;所述固定管安装在卡座内,卡座用于对固定管的位置进行限定,所述磁吸块与设置在固定管底部的铁块相配合,实现固定管的固定。所述弧形夹紧槽内设置有橡胶夹块,用于对鼠尾实现保护。
15.进一步地,所述旋转驱动电机上安装有光栅编码器,用于实现旋转驱动电机零位的确定以及获取旋转驱动电机的旋转角度。
16.进一步地,所述相机通过相机支撑杆和相机支撑座设置在底板上。
17.同时,本发明还提供一种小鼠尾静脉自动注射用药装置的操作方法,包括以下步骤:
18.步骤一、小鼠定位:
19.1.1)将小鼠提拉于固定管中,并在小鼠头部安装挡块,限制小鼠移动,并保持小鼠尾部外露;
20.1.2)对小鼠尾部进行清洁和消毒;
21.1.3)将固定管安装到卡座上,并通过磁吸块对固定管进行固定;
22.步骤二、鼠尾固定:
23.2.1)将上夹杆打开,将鼠尾放置在弧形夹紧槽中,气缸工作,使得上夹杆与下夹座配合实现鼠尾根部的夹紧;
24.2.2)使得转动夹组件回零;
25.2.3)打开活动上夹板,将鼠尾沿弧形固定槽贴合放置,随后,将鼠尾放置于活动上夹板和半圆形下夹板之间,并扣紧活动上夹板;
26.步骤三、尾侧静脉定位:
27.3.1)打开光源,通过相机获得鼠尾图像;
28.3.2)获取鼠尾侧静脉位置;
29.根据获得的鼠尾图像旋转鼠尾,直至鼠尾的右侧静脉血管或左侧静脉血管位于最高位置;
30.步骤四、止血;
31.4.1)注射完成后,止血驱动电机开始转动,通过止血减速机驱动止血杆旋转,进而将止血垫压到鼠尾,直至止血杆触碰止血限位器,止血驱动电机停止旋转,止血减速机保持压力持续输出;
32.4.3)止血后,止血驱动电机回转,止血杆反向转动,直到止血杆压触回零限位器后停止转动;
33.4.4)打开活动上夹板,取出固定管,卸下固定螺栓,将小鼠放回;
34.步骤五、数据记录:
35.数据处理单元记录小鼠编号和用药参数。
36.与现有技术相比,本发明技术方案具有以下有益效果:
37.1.本发明小鼠尾侧静脉注射装置设置有固定单元、鼠尾位置调节单元、光学定位单元、注射单元、数据处理单元,五个单元相配合实现小鼠尾静脉自动注射,具有自动化程
度高,注射速度快、批量化程度高的特点,解决了小鼠实验中容易发生小鼠咬伤,大批量实验记录效率低、容易发生记录错误的缺陷。
38.2.本发明装置设有光学定位单元和鼠尾位置调节单元,利用小鼠尾侧静脉与肌肉组织透光性差异,在鼠尾底部布设光源,在对向获取图像,通过旋转鼠尾,获得不同旋转角度下的图像。根据不同位置尾侧静脉成像差异定位小鼠尾侧静脉,解决了人工入针时,人眼寻找尾侧静脉位置不准,成功率低的问题。
39.3.本发明装置通过鼠尾位置调节单元卡紧小鼠尾部,迫使尾侧静脉扩张;通过光学成像系统完成针头与尾侧静脉对准;通过“v形”限位托板,使鼠尾侧静脉在入针位置保持圆弧,提供入针条件,从而解决了人工注射时,需要先入针,再挑针,再入针的要求。
40.4.本发明装置设置有转动夹组件和旋转组件,可以对小鼠的尾部位置进行调整,从而更加准确的实现小鼠的尾静脉注射。
附图说明
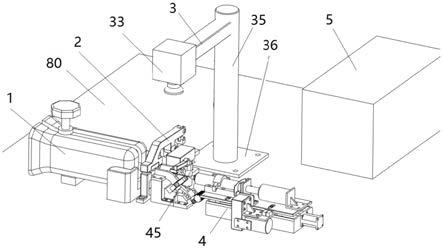
41.图1为本发明小鼠尾静脉自动注射用药装置结构示意图;
42.图2为本发明固定单元的结构示意图;
43.图3为本发明鼠尾位置调节单元的结构示意图;
44.图4为本发明旋转组件的结构示意图;
45.图5为本发明转动夹组件的结构示意图;
46.图6为本发明注射单元的结构示意图;
47.图7为本发明入针助推组件的结构示意图;
48.图8为本发明平移组件的结构示意图;
49.图9为本发明止血组件的结构示意图;
50.图10a为本发明相机获取的鼠尾透视图一;
51.图10b为本发明相机获取的鼠尾透视图二;
52.图10c为本发明相机获取的鼠尾透视图三;
53.图10d为本发明相机获取的鼠尾透视图四。
54.附图标记:1-固定单元,2-鼠尾位置调节单元,3-光学定位单元,4-注射单元,5-数据处理单元,6-固定管,7-固定螺栓,8-挡块,9-卡座,10-磁吸块, 11-固定夹组件,12-转动夹组件,13-旋转组件,14-限位托板组件,15-上夹杆, 16-橡胶夹块,17-下夹座,18-上夹连接杆,19-伸长杆,20-气缸,21-上夹支撑座,22-活动上夹板,23-半圆形下夹板,24-旋转连杆,25-轴承固定座,26
‑ꢀ
齿轮组,27-旋转驱动电机,30-限位托板,31-通光孔,32-托板安装座,33
‑ꢀ
相机,34-光源,35-相机支撑杆,36-相机支撑座,38-尾左侧静脉,39-尾右侧静脉,40-尾椎,41-尾正中静脉,42-入针助推组件,43-注射助推组件,44
‑ꢀ
平移组件,45-止血组件,46-滑台,47-丝杠,48-前轻触开关,49-光杠,50
‑ꢀ
助推步进电机,51-后轻触开关,52-导轨底座,54-针头,55-针筒,56-助推机构底板,57-针筒固定卡,58-针筒限位座,59-活塞杆压帽,60-压帽固定卡, 61-助推器,62-燕尾卡槽,63-助推固定片,64-前端限位开关,65-末端限位开关,67-平移螺母板,68-输出轴,69-平移连接板,70-平移减速机,71-平移近端限位器,72-平移远端限位器,73-平移电机,74-止血杆,75-止血垫,76
‑ꢀ
止血限位器,77-止血驱动电机,78-止血减速机,79-回零限位器,80-底板。
具体实施方式
55.下面结合附图和具体实施方式对本发明进行详细说明。本领域技术人员应当理解的是,这些实施方式仅仅用来解释本发明的技术原理,目的并不是用来限制本发明的保护范围。
56.如图1所示,本发明小鼠尾静脉自动注射用药装置包括固定单元1、鼠尾位置调节单元2、光学定位单元3、注射单元4、数据处理单元5;固定单元1用于完成小鼠的固定;鼠尾位置调节单元2用于实现鼠尾的夹紧和鼠尾的位置调节;光学定位单元3获取光照射条件下鼠尾透视图形,并判断静脉血管位置;注射单元4位于鼠尾位置调节单元2的后端,用于实现药物注射;数据处理单元5用于实现鼠尾位置调节单元2、光学定位单元3、注射单元4的控制,经过以上5个单元的协同工作,完成一次小鼠的尾静脉注射用药及数据记录。
57.如图2所示,本发明固定单元1主要由固定管6、固定螺栓7、挡块8、卡座 9和磁吸块10构成。固定管6的侧面设置有贯通的开槽,挡块8设置在固定管6 的前端,用于限制小鼠移动,固定螺栓7设置在固定管6上,用于对挡块8进行固定;固定管6安装在卡座9内,卡座9用于对固定管6的位置进行限定,磁吸块10与设置在固定管6底部的铁块相配合;其中,固定管6、固定螺栓7、挡块 8为一个组件,可从卡座9上拆卸下来,固定管6底部铁块与磁吸块10相配合,可利用磁吸块10吸力吸附固定管6,实现固定管6的固定。
58.注射药物前,人工将小鼠尾部提起,沿固定管6侧面开槽将小鼠拉入,并在小鼠头部安装挡块8,限制小鼠移动,并保持小鼠尾部露出。随后,使用酒精对小鼠尾部进行清洁,并将小鼠固定管6卡入卡座9,完成小鼠的固定。
59.如图3所示,本发明鼠尾位置调节单元2用于实现鼠尾的夹紧和鼠尾的位置调节,包括固定夹组件11、限位托板组件14、转动夹组件12和旋转组件13。固定夹组件11位于固定单元1的后端,包括上夹杆15、下夹座17、上夹支撑座 21、气缸20和上夹连接杆18;下夹座17、上夹支撑座21、气缸20均设置在底板80上;上夹杆15的一端通过上夹连接杆18与气缸20的伸长杆19铰接,中部与上夹支撑座21铰接,另一端与下夹座17配合实现鼠尾根部的夹紧,且下夹座17与上夹杆15配合的端面设置有弧形夹紧槽,弧形夹紧槽内设置有橡胶夹块16,用于对鼠尾实现保护。
60.上述固定夹组件11采用杠杆原理,打开时,有较大的开度,便于鼠尾固定操作;夹紧时,夹子金属部分完全闭合,利用橡胶弹性将鼠尾压紧。在下夹座17、上夹杆15与小鼠尾部接触的地方使用可更换橡胶夹块16,以保证在夹紧情况下对小鼠尾无伤害。橡胶夹块16中心采用弧形设计,可将鼠尾固定在橡胶夹块16中心位置,且与鼠尾包裹较好,有较好的限制血流能力。该固定夹组件11有两个作用:(a)用于固定鼠尾根部到中心位置;(b)限制静脉血回流,在进针时有利于保持静脉充盈,便于光学定位单元3判断静脉位置。
61.注射药物时,控制气缸20的气阀开闭,从而控制气缸20上下运动,上夹杆15为打开状态时,放置鼠尾后,气缸20的伸长杆19向上移动,使得上夹杆 15向下运动,与下夹座17配合夹紧鼠尾;注射完成后,气缸20的伸长杆19向下移动,使得上夹杆15向上运动,与下夹座17分离,松开鼠尾。
62.如图3所示,本发明限位托板组件14位于固定夹组件11的后端,包括限位托板30和托板安装座32;托板安装座32设置在底板80上,限位托板30设置在托板安装座32上,且限位托板30的表面设置有弧形固定槽,弧形固定槽的前端开口位置与弧形夹紧槽的开口位置相
匹配,弧形固定槽的后端向下弯曲,弧形固定槽的截面呈“v”形,表面平滑。弧形固定槽的前部水平,后部有一定的弧度直到转为下垂一定角度,使得鼠尾贴合在限位托板30表面具有一定的弧度,为针头54提供要求的入针条件。同时,弧形固定槽的槽底设置有通光孔31,该位置与入针位置相匹配,用于下方安装的光源34光线透过。
63.如图4所示,本发明旋转组件13位于限位托板组件14的后端,包括旋转连杆24、轴承固定座25、齿轮组26和旋转驱动电机27;旋转驱动电机27设置在底板80上,其输出轴通过齿轮组26带动旋转连杆24旋转,旋转连杆24通过轴承设置在轴承固定座25上,轴承固定座25设置在底板80上;旋转组件13通过旋转连杆24与转动夹组件12连接在一起,可实现鼠尾的旋转,用于配合光学定位单元3实现鼠尾静脉血管定位。齿轮组26采用90
°
齿轮连接,也可采用变速箱类连接,主要用于驱动旋转连杆24转动。旋转驱动电机27为步进电机或伺服电机,可控制转动夹组件12按按一定速度旋转;旋转驱动电机27尾部安装有光栅编码器,可确定电机零位、获得电机转过角度,用于推算转转动夹组件12转动的角度。
64.注射药物时,根据光学定位单元3获取的图片控制旋转驱动电机27正反转实现鼠尾位置自动调节时,当关机时,控制旋转驱动电机27旋转回到零位。
65.如图5所示,转动夹组件12位于限位托板组件14和旋转组件13之间,用于固定鼠尾,包括活动上夹板22和半圆形下夹板23;半圆形下夹板23与旋转连杆24连接,活动上夹板22设置在半圆形下夹板23的上方,且与半圆形下夹板23实现鼠尾尾部的夹紧,同时能够在旋转组件13的带动下,实现鼠尾的旋转。半圆形下夹板23中心设计有安装孔,用于连接旋转连杆24。半圆形下夹板23 采用半圆设计,下部外轮廓与下方支架保持滑动接触。由于旋转组件13无法承受鼠尾固定时向下按压的力量,所以需在半圆形下夹板23下方设置托板安装座32,托板安装座32上设置有v形槽,使得半圆形下夹板23能够在托板安装座32上滑动。
66.注射药物时,扳起活动上夹板22,将小鼠尾尖部拉直后,将活动上夹板 22扣上,向下压直到卡口扣好。
67.如图1所示,光学定位单元3包括相机33、光源34、相机支撑杆35和相机支撑座36。光源34设置在限位托板30的通光孔31下方,光源34发出的光穿过通光孔31入射至鼠尾,相机33设置在限位托板30的上方,且在光源34的正上方位置,用于获取光照射条件下鼠尾透视图形,并判断静脉血管位置。鼠尾是由尾正中动脉、尾正中静脉41、尾左侧静脉38、尾右侧静脉39、尾椎40构成,其中,2根侧静脉粗大且分布表浅,易于寻找,在灯光照射下有明显的深色轮廓,通过上方的摄像头获取图片,分析后确定血管位置。
68.当鼠尾为图10a所示位置时(鼠背朝上)两侧尾静脉分别位于尾椎40两侧,此时可观测到3个阴影。转动鼠尾到图10b所示位置,右侧静脉血管位于尾椎 40正上方,观察到左侧阴影变窄,中间阴影加深,右侧无阴影。此时说明一侧的尾静脉位于正上方,达到入针位置。旋转鼠尾到图10c所示位置,在右侧无法观察到阴影,左侧阴影加宽变浅,中间阴影变浅,此时说明两条尾静脉均位于左侧。旋转鼠尾到图10d所示位置,鼠尾左右两侧无明显阴影,中部阴影较为明显。
69.如图1和图6所示,本发明注射单元4位于鼠尾位置调节单元2的后端,包括注射助推组件43、入针助推组件42、平移组件44和止血组件45;注射助推组件43用于实现药物注射,入针助推组件42用于完成注射器的入针,平移组件44用于实现注射器横向平移,止血组件45用于实现注射完成后的止血。
70.如图6所示,注射助推组件43用于实现药物注射,包括注射器、助推机构底板56、针筒限位座58、压帽固定卡60、针筒固定卡57、前端限位开关64、末端限位开关65、助推固定片63和助推器61;注射器的针筒55通过针筒限位座58设置在助推机构底板56上,注射器的活塞杆压帽59通过压帽固定卡60与助推器61的芯杆连接,助推器的外筒通过助推固定片63设置在助推机构底板 56上;针头54、针筒55和注射器活塞杆压帽59为通用注射器,由实验人员配置药剂,并将针头54装配后,安装到针筒限位座58上,注射器活塞杆压帽59 安装到压帽固定卡60内,并将针筒固定卡57卡接在针筒限位座58上。压帽固定卡60与助推器61的芯杆连接,由助推器61的芯杆推动,完成注射器活塞杆压帽59向针筒55推进,药剂被推入小鼠尾静脉。助推机构底板56上开有4个燕尾卡槽62,并通过4个燕尾螺母将助推机构底板56与滑台46连接在一起,通过燕尾槽连接,确保注射助推组件43可在滑台46上横向平移。助推机构底板56 上安装有前端限位开关64和末端限位开关65,分别用于给定注射器极限位置 (该位置助推器61芯杆不再继续移动)。
71.如图7所示,上述入针助推组件42包括导轨底座52、滑台46、助推步进电机50、丝杠47、光杠49、前轻触开关48和后轻触开关51;滑台46设置在导轨底座52上方,且与丝杠47螺纹连接,助推步进电机50设置在导轨底座52上,其输出轴与丝杠47连接,带动滑台46实现移动,在滑台46上还有若干固定孔。滑台46通过助推步进电机50控制进给速度,并通过脉冲数计算进给距离。导轨底座52通过设置底板80上,光杠49用于限定滑台46滑动方向,丝杠47连接在助推步进电机50的输出轴上,并与滑台46配合,推动滑台46沿光杠49方向前后移动。前轻触开关48和后轻触开关51用于限定滑台46的运行范围,后轻触开关51还提供滑台46起始运动的零位。
72.如图8所示,上述平移组件44包括平移螺母板67、平移连接板69、平移减速机70、平移电机73、平移近端限位器71和平移远端限位器72;平移电机73 的壳体通过平移连接板69与滑台46连接,平移电机73的输出轴通过平移减速机70与平移螺母板67连接,且平移减速机70的输出轴68与平移螺母板67螺纹连接,平移螺母板67与助推机构底板56连接,在平移电机73的驱动下实现助推机构底板56的横向平移,当输出轴68转动时,推动平移螺母板67水平平移,进而推动助推机构底板56水平平移。当移动到最远端极限位时,平移远端限位器72输出断开信号,使平移电机73停止转动。当平移电机73反向转动,助推机构底板56向平移电机73方向移动,当移动到近端极限位时,平移近端限位器71输出断开信号,使平移电机73停止转动。
73.如图9所示,止血组件45用于实现注射完成后的止血,包括止血杆74、止血垫75、止血驱动电机77、止血减速机78、止血限位器76和回零限位器79;止血驱动电机77的其输出轴通过止血减速机78与止血杆74的一端连接,带动止血杆74实现摆动,止血减速机78的本体通过连接板设置在托板安装座32上,且止血驱动电机77的本体通过支架与止血减速机78的本体连接,止血垫75设置在止血杆74的另一端,用于实现鼠尾注射后的止血;止血驱动电机77、止血减速机78构成回转机构,并通过驱动器控制止血驱动电机77正反向旋转。止血垫75采用柔性软橡胶制作,与鼠尾接触部位为止血棉,采用夹持方式,便于更换。当鼠尾用药注射完毕后,针头54抽出后,止血机构正向旋转,止血垫75压在鼠尾上方,帮助止血,止血限位器76和回零限位器79设置在止血减速机78上,用于对止血杆74的摆动位置实现限定。
74.本发明数据处理单元5用于实现鼠尾位置调节单元2、光学定位单元3、注射单元4
的控制,由计算机、驱动器、控制模块,数据记录模块构成。计算机提供人机界面、控制信号的上传及下发。驱动器负责接收计算发出的命令,驱动各个执行机构,完成相应工作。计算机上还安装有图像处理模块,用于确定小鼠尾静脉位置、针头位置,协助入针操作。控制模块用于控制上述各单元的正常运行。数据记录模块负责记录操作信息、实验信息等,包括小鼠编号、类型,注射时间、注射药量、药品名称、编号、剂量等,并将以上信息保存到数据库中。
75.本发明提供的小鼠尾静脉自动注射用药装置的操作方法包括以下步骤:
76.步骤一、小鼠定位:
77.1.1)将小鼠提拉于固定管6中,并在小鼠头部安装挡块8,限制小鼠移动,并保持小鼠尾部外露;
78.1.2)对小鼠尾部进行清洁和消毒;
79.1.3)将固定管6安装到卡座9上,并通过磁吸块10对固定管6进行固定;
80.步骤二、鼠尾固定:
81.2.1)将上夹杆15打开,将鼠尾放置在弧形夹紧槽中,气缸20工作,使得上夹杆15与下夹座17配合实现鼠尾根部的夹紧;
82.2.2)使得转动夹组件12回零;
83.2.3)打开活动上夹板22,将鼠尾沿弧形固定槽贴合放置,随后,将鼠尾放置于活动上夹板22和半圆形下夹板23之间,并扣紧活动上夹板22;
84.步骤三、尾侧静脉定位:
85.3.1)光学定位单元3打开光源34,通过相机33获得鼠尾图像;
86.3.2)获取鼠尾侧静脉位置;
87.旋转组件13转动
±
90
°
,判断鼠尾侧静脉位置,方法如下:(1)旋转鼠尾,以图像中心线为界,待单侧有阴影时,且阴影较宽时,确定鼠尾位置为图10c; (2)鼠尾转动一定角度,将出现单侧阴影较浅,但另一侧无阴影时,认为尾静脉达到上方(图10b);继续转动鼠尾,当出现图10a所示图像时,确认鼠尾位置。此时,控制旋转组件13回转一定角度,待再次出现图10b所示图像时,认为鼠尾侧静脉达到最高位置;(3)确定鼠尾朝上后,在旋转过程中,不能保证尾静脉位于限位托板30的正中心,因此通过光学定位单元3,确认针位于静脉血管的正前方;
88.步骤四、注射;
89.4.1)将配置好的药剂吸入注射器,将针头54安装到针筒55上,并将针筒 55固定在注射助推组件43上,并确保针头54位置正确;
90.4.2)向数据记录模块填写相应的用药信息,确定控制模块参数正确,系统状态正常;
91.4.3)控制模块控制入针助推组件42的滑台46向前移动到大概入针位置,其起始位置由后轻触开关51确定;
92.4.4)光学定位单元3在视野范围内发现针头54,并判断针头54与侧血管是否对齐;如果针头54与尾侧血管未对齐,控制平移组件44进行平移操作,确保针头54与静脉血管对齐;控制入针助推组件42的滑台46向前平移,针头54 扎入限位托板30上方的鼠尾侧静脉血管;
93.4.5)松开上夹杆15,确保静脉回流路径畅通,便于药物注射到尾侧静脉;
94.4.8)控制注射助推组件43向前移动,进而使得药剂注射到小鼠尾部侧静脉;控制模块控制入针助推组件42向回移动,针头54退出,直到回到零位;
95.步骤五、止血;
96.5.1)止血驱动电机77开始转动,通过止血减速机78驱动止血杆74旋转,进而将止血垫75压到鼠尾,直至止血杆74触碰止血限位器76,止血驱动电机 77停止旋转,止血减速机78保持压力持续输出;
97.5.3)止血30s后,停止止血,止血驱动电机77回转,止血杆74反向转动,直到止血杆74压触回零限位器79后停止转动;
98.5.4)打开活动上夹板22,取出固定管6,卸下固定螺栓7,将小鼠放回;
99.步骤六、数据记录:
100.模块自动记录注射用药部分参数,包括注射量、注射时间,填写小鼠编号,用药成分等信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
