1.本实用新型涉及无人艇领域,具体涉及一种无人艇自动挡位舵机。
背景技术:
2.海洋环境监测是防止海洋环境灾害、预防突发性海洋污染事件,评估海洋生态平衡的重要手段,是保证海洋生态文明的重要举措。针对新形势下海洋环境保护和管理、海洋资源开发利用形势,对河口海域水环境监测和陆源污染控制提出了明确的要求;同时发布一系列方案、规划,要求大力推动海洋生态环境监测布局优化和能力提升。
3.我国对水环境监测任务繁重,开销巨大,所以在人工智能与机器人技术的辅助下,无人艇应运而生,目前的无人艇的挡位切换结构大多较为复杂,增加了使用成本。
技术实现要素:
4.为了克服背景技术的不足,本实用新型提供一种无人艇自动挡位舵机,主要解决目前的无人艇的挡位切换结构大多较为复杂,增加了使用成本的问题。
5.本实用新型所采用的技术方案是:
6.一种无人艇自动挡位舵机,包括转动轴,所述转动轴上设有由所述转动轴带动摆动的摆杆,所述摆杆上连接有连接杆,所述连接杆一端用于与变速箱的挡位杆连接;
7.所述摆杆包括通过所述连接杆带动所述挡位杆前倾的前进挡位位置;
8.通过所述连接杆带动所述挡位杆垂直于水平面的空挡挡位位置;
9.通过所述连接杆带动所述挡位杆后仰的后退挡位位置。
10.所述连接杆包括杆体和所述杆体上设有的可伸缩的连接头,所述连接头用于与摆杆连接。
11.所述连接头上设有螺杆,所述螺杆与所述杆体螺纹连接。
12.所述摆杆上沿长度方向设有若干第一连接孔,所述连接头上设有与所述第一连接孔相配合的第二连接孔。
13.所述杆体两端均设有所述连接头,一端所述连接头用于与挡位杆连接。
14.所述螺杆上还设有螺母,所述螺母轴向端面用于与杆体接触。
15.本实用新型的有益效果是:本实用新型提供一种无人艇自动挡位舵机,可以方便的控制挡位变换,结构简单,成本较低。
附图说明
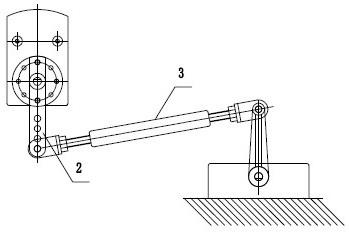
16.图1为本实用新型一个实施例的结构示意图(前进挡位位置)。
17.图2为本实用新型一个实施例的结构示意图(空挡挡位位置)。
18.图3为本实用新型一个实施例的结构示意图(后退挡位位置)。
19.图4为本实用新型一个实施例的局部结构示意图。
具体实施方式
20.下面结合附图对本实用新型作进一步说明:如图所示,一种无人艇自动挡位舵机,包括转动轴1,所述转动轴上设有由所述转动轴带动摆动的摆杆2,所述摆杆上连接有连接杆3,所述连接杆一端用于与变速箱的挡位杆9连接;所述摆杆包括通过所述连接杆带动所述挡位杆前倾的前进挡位位置;通过所述连接杆带动所述挡位杆垂直于水平面的空挡挡位位置;通过所述连接杆带动所述挡位杆后仰的后退挡位位置。该转动轴可以为伺服电机的转动轴,伺服电机可以通过控制机构(可以为pc或者控制线路板)来实现正反转,该电机转动时,带动摆杆摆动来实现连接杆的拉动或者推动挡位杆进而实现挡位的切换。
21.在本实用新型中,如图所示,所述连接杆包括杆体30和所述杆体上设有的可伸缩的连接头31,所述连接头用于与摆杆连接。可以调节连接头的伸出长度,能够更好的拆装以及适配不同的距离。
22.在本实用新型中,如图所示,所述连接头上设有螺杆311,所述螺杆与所述杆体螺纹连接。通过螺纹连接的连接头和螺杆实现连接头的伸缩,结构简单,使用方便。
23.在本实用新型中,如图所示,所述摆杆上沿长度方向设有若干第一连接孔21,所述连接头上设有与所述第一连接孔相配合的第二连接孔312。该连接头可以调整安装在摆杆的位置,能够更好的使用,该第一连接孔和第二连接孔可以通过螺栓连接,螺栓穿过第一连接孔和第二连接孔后通过螺母固定即可。
24.在本实用新型中,如图所示,所述杆体两端均设有所述连接头,一端所述连接头用于与挡位杆连接。
25.在本实用新型中,如图所示,所述螺杆上还设有螺母,所述螺母轴向端面用于与杆体接触。两端的螺母固定杆体的两端,以更加稳定的安装。
26.参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。实施例不应视为对本实用新型的限制,但任何基于本实用新型的精神所作的改进,都应在本实用新型的保护范围之内。
技术特征:
1.一种无人艇自动挡位舵机,其特征在于:包括转动轴(1),所述转动轴上设有由所述转动轴带动摆动的摆杆(2),所述摆杆上连接有连接杆(3),所述连接杆一端用于与变速箱的挡位杆(9)连接;所述摆杆包括通过所述连接杆带动所述挡位杆前倾的前进挡位位置;通过所述连接杆带动所述挡位杆垂直于水平面的空挡挡位位置;通过所述连接杆带动所述挡位杆后仰的后退挡位位置。2.根据权利要求1 所述的一种无人艇自动挡位舵机,其特征在于:所述连接杆包括杆体(30)和所述杆体上设有的可伸缩的连接头(31),所述连接头用于与摆杆连接。3.根据权利要求2 所述的一种无人艇自动挡位舵机,其特征在于:所述连接头上设有螺杆(311),所述螺杆与所述杆体螺纹连接。4.根据权利要求3 所述的一种无人艇自动挡位舵机,其特征在于:所述摆杆上沿长度方向设有若干第一连接孔(21),所述连接头上设有与所述第一连接孔相配合的第二连接孔(312)。5.根据权利要求4 所述的一种无人艇自动挡位舵机,其特征在于:所述杆体两端均设有所述连接头,一端所述连接头用于与挡位杆连接。
技术总结
一种无人艇自动挡位舵机。主要解决目前的无人艇的挡位切换结构大多较为复杂,增加了使用成本的问题。其特征在于:包括转动轴(1),所述转动轴上设有由所述转动轴带动摆动的摆杆(2),所述摆杆上连接有连接杆(3),所述连接杆一端用于与变速箱的挡位杆(9)连接;所述摆杆包括通过所述连接杆带动所述挡位杆前倾的前进挡位位置;通过所述连接杆带动所述挡位杆垂直于水平面的空挡挡位位置;通过所述连接杆带动所述挡位杆后仰的后退挡位位置。本实用新型提供一种无人艇自动挡位舵机,可以方便的控制挡位变换,结构简单,成本较低。成本较低。成本较低。
技术研发人员:卢芳芳 毛坤宇 王海荣 厉梁 王洪波 叶贤槐 陈家豪 穆寅锋 张春娥 顾胜蓝 陈拓
受保护的技术使用者:舟山市质量技术监督检测研究院
技术研发日:2021.11.26
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。