一种适用于3d打印的三维负泊松比结构
技术领域
1.本实用新型涉及负泊松比结构技术领域,尤其涉及一种适用于3d打印的三维负泊松比结构。
背景技术:
2.通常认为,几乎所有的材料泊松比值都为正,约为1/3,橡胶类材料为 1/2,金属铝为0.133,铜为0.127,典型的聚合物泡沫为0.11~0.14等,即这些材料在拉伸时材料的横向发生收缩。而负泊松比效应,是指受拉伸时,材料在弹性范围内横向发生膨胀;而受压缩时,材料的横向反而发生收缩。这种现象在热力学上是可能的,但通常材料中并没有普遍观察到负泊松比效应的存在。近年来发现的一些特殊结构的材料具有负泊松比效应,由于其奇特的性能而倍受材料科学家和物理学家们的重视该负泊松比结构可以作为夹芯结构的面层,起到保护芯材和提高结构整体的力学性能的作用。
3.与一般泊松比为正的材料相反,泊松比为负的材料和结构在拉力作用下横向扩展,在压力作用下横向内缩。负泊松比材料和结构以其独特的方式受到了广泛的关注和研究。实验证明,该类功能性材料具有良好的力学性能,包括抗剪切、抗压痕性、抗冲击、良好的能量吸收能力,具有广阔的工业应用前景。由于3d打印技术在结构可制造性方面的局限,许多常规负泊松比结构不能通过3d打印技术成型。
技术实现要素:
4.有鉴于此,为解决上述问题,本实用新型的实施例提供了一种适用于3d打印的三维负泊松比结构。
5.本实用新型的实施例提供一种适用于3d打印的三维负泊松比结构,包括:
6.多个平面螺旋结构,在上下向间隔设置,所述平面螺旋结构包括多个螺旋单元,所述螺旋单元包括多个螺旋臂,所述螺旋臂呈椭圆的四分之一弧长状设置,所述螺旋臂内端与椭圆长轴端点重合,外端与该椭圆短轴端点重合,所述螺旋单元由一所述螺旋臂以所述内端为中心环形阵列而成,多个所述螺旋臂的内端重合形成中心点;
7.多个所述螺旋单元在平面上沿x轴、y轴依次排列,相邻两个所述螺旋单元呈镜像设置,且通过所述外端固定连接;相邻两个所述平面螺旋结构的所述螺旋单元在上下向一一对应,且呈镜像设置;
8.倾斜支撑结构,包括多个倾斜角度相同的倾斜杆,上下相邻两个所述螺旋单元的所述螺旋臂外端一一对应,且分别通过所述倾斜杆连接。
9.进一步地,所述倾斜杆的倾斜角度为30-60
°
。
10.进一步地,每一所述螺旋单元的所述螺旋臂外端位于正多边形的边长上,所述正多边形的边长数量与所述螺旋臂的数量相同,且每一所述螺旋臂与每一所述边长一一对应且垂直,所述正多边形的边长长度与所述椭圆短轴长度之比为2。
11.进一步地,所述螺旋单元的多个所述螺旋臂均匀间隔设置。
12.进一步地,每一所述螺旋单元的螺旋臂的数量为三个。
13.进一步地,每一所述螺旋单元的螺旋臂的数量为四个。
14.进一步地,每一所述螺旋单元的螺旋臂的数量为六个。
15.进一步地,所述倾斜杆与所述螺旋臂外端的连接处内侧呈圆角设置。
16.本实用新型的实施例提供的技术方案带来的有益效果是:本实用新型综合考虑3d打印技术的成形局限,设计新型三维负泊松比结构,该结构负泊松比性能高且适用于3d打印,在压缩实验中,该负泊松比结构具有典型的负泊松比形变特征,典型的弯曲主导的力学响应。负泊松比结构在较大压缩应变区间下具有十分平稳的平台应力,没有任何急剧塌陷和灾难性破坏,这体现出负泊松比结构设计的合理性,这为设计高应变或抗冲击功能器件提供了难得的机会。
附图说明
17.图1是本实用新型提供的适用于3d打印的三维负泊松比结构实施例2 中的螺旋单元的结构示意图;
18.图2是本实用新型提供的适用于3d打印的三维负泊松比结构实施例2 的局部结构示意图;
19.图3是图2中适用于3d打印的三维负泊松比结构在拉伸作用下的结构形变示意图;
20.图4是图2中适用于3d打印的三维负泊松比结构在压缩作用下的结构形变示意图;
21.图5是在压缩载荷下有限元仿真负泊松比结构形变过程;
22.图6中a是负泊松比结构力-位移曲线,b、c是负泊松比结构压缩前后的光学图像,d负泊松比结构压缩过程;
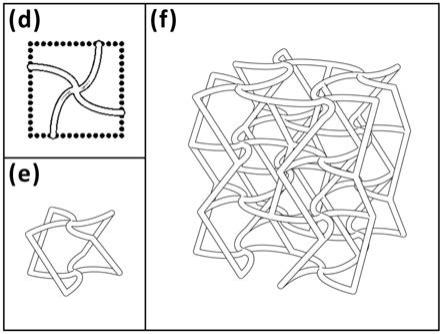
23.图7中a-c是本实用新型提供的适用于3d打印的三维负泊松比结构实施例1的结构示意图,d-f是本实用新型提供的适用于3d打印的三维负泊松比结构实施例2的结构示意图,g-i是本实用新型提供的适用于3d打印的三维负泊松比结构实施例3的结构示意图;
24.图8中a-c是图7中适用于3d打印的三维负泊松比结构实施例2(b 和c中连接处内侧为圆角)的结构示意图。
25.图中:螺旋单元100、下螺旋单元101、上螺旋单元102、左螺旋单元 103、右螺旋单元104、前螺旋单元105、后螺旋单元106、可变空间107、螺旋臂1、内端11、外端12、中心点13、倾斜杆2、连接处3。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
27.本实用新型的实施例提供一种适用于3d打印的三维负泊松比结构,包括多个平面螺旋结构和倾斜支撑结构。
28.多个平面螺旋结构在上下向间隔设置,请参见图1和图2,所述平面螺旋结构包括多个螺旋单元100,所述螺旋单元100包括多个螺旋臂1,所述螺旋臂1呈椭圆的四分之一弧长状设置,所述螺旋臂1内端11与椭圆长轴端点重合,外端12与该椭圆短轴端点重合。所述螺旋单元100由一所述螺旋臂1以所述内端11为中心环形阵列而成,所述螺旋单元100的多
个所述螺旋臂1均匀间隔设置,多个所述螺旋臂1的内端11重合形成中心点13。请参见图7,螺旋单元100的螺旋臂1数量为n,每一螺旋单元100的螺旋臂1外端可位于正多边形的边长上,正多边形的边长数量与螺旋臂1的数量相同,且每一螺旋臂1与每一边长一一对应且垂直。为了便于模型的压缩和拉伸,本实施例中,正多边形的边长长度与椭圆短轴长度之比为2,在拉伸和压缩时结构的负泊松比性能都较好,正多边形的边长长度比椭圆短轴长度大于2时,在压缩时结构的负泊松比性能较好,正多边形的边长长度比椭圆短轴长度小于2时,在拉伸时结构的负泊松比性能较好。
29.请参见图3和图4,多个所述螺旋单元100在平面上沿x轴、y轴依次排列,相邻两个所述螺旋单元100呈镜像设置,且通过所述外端12固定连接,周向四个所述螺旋单元100依次通过外端12连接形成可变空间107;在上下向相邻两个所述平面螺旋结构的所述螺旋单元100在上下向一一对应,且呈镜像设置。
30.倾斜支撑结构包括多个倾斜角度相同的倾斜杆2,上下相邻两个所述螺旋单元100的所述螺旋臂1外端12一一对应,且分别通过所述倾斜杆2连接。为适应3d打印的制造要求,所述倾斜杆2的倾斜角度(倾斜杆2与 xy平面的初始夹角)为30-60
°
。
31.实施例1,请参见图7a-图7c,每一所述螺旋单元100的螺旋臂1的数量为三个,平面螺旋结构以螺旋臂1内端11为旋转中心,螺旋臂1以120
°
为步长环形阵列3次得到螺旋单元100,x轴、y轴和z轴(上下向)上相邻两个螺旋单元100均呈镜像设置,上下相邻的螺旋单元100通过三个倾斜杆2连接,倾斜杆2上下两端分别与螺旋单元100的外端12连接。
32.实施例2,请参见图7d-图7f,每一所述螺旋单元100的螺旋臂1的数量为四个,平面螺旋结构以螺旋臂1内端11为旋转中心,螺旋臂1以90
°
为步长环形阵列4次得到螺旋单元100,x轴、y轴和z轴(上下向)上相邻两个螺旋单元100均呈镜像设置,上下相邻的螺旋单元100通过四个倾斜杆2连接,倾斜杆2上下两端分别与螺旋单元100的外端12连接。
33.实施例3,请参见图7g-图7i,每一所述螺旋单元100的螺旋臂1的数量为六个,平面螺旋结构以螺旋臂1内端11为旋转中心,螺旋臂1以60
°
为步长环形阵列6次得到螺旋单元100,x轴、y轴和z轴(上下向)上相邻两个螺旋单元100均呈镜像设置,上下相邻的螺旋单元100通过六个倾斜杆2连接,倾斜杆2上下两端分别与螺旋单元100的外端12连接。
34.以实施例2为例,当对螺旋单元100在z轴方向上施加反向载荷时(向上拉动上螺旋单元102,向下拉动下螺旋单元101),示例性的,请参见图 3,倾斜杆2下方的下螺旋单元101顺时针转动,倾斜杆2上方的上螺旋单元102逆时针转动,使得倾斜杆2在拉伸作用下转动趋向垂直状态,上螺旋单元102在x轴上与左螺旋单元103、右螺旋单元104相邻,上螺旋单元102在y轴上与前螺旋单元105、后螺旋单元106相邻,上螺旋单元102 逆时针转动,带动前螺旋单元105、后螺旋单元106、左螺旋单元103、右螺旋单元104均顺时针转动,从而使得螺旋单元100之间的可变空间107 的面积变大,倾斜杆2下方的螺旋单元100旋转方向同理。纵向拉伸该结构时,多个倾斜杆2趋于垂直的过程中,拉动上下相邻的xy平面方向的螺旋单元100旋转,且旋转方向互逆(顺时针/逆时针),当倾斜杆2完全垂直时,在螺旋单元100旋转后趋于直线且平面螺旋结构尺寸增加。
35.当对螺旋单元100在z轴方向上施加同向载荷时(向下压缩上螺旋单元102,向上压缩下螺旋单元101),示例性的,请参见图4,倾斜杆2下方的下螺旋单元101逆时针转动,倾斜杆2上方的上螺旋单元102顺时针转动,使得倾斜杆2在压缩作用下转动趋向水平状态,上螺
旋单元102在x 轴上与左螺旋单元103、右螺旋单元104相邻,上螺旋单元102在y轴上与前螺旋单元105、后螺旋单元106相邻,上螺旋单元102顺时针转动,带动前螺旋单元105、后螺旋单元106、左螺旋单元103、右螺旋单元104均逆时针转动,从而使得螺旋单元100之间的可变空间107的面积变小,倾斜杆2下方的螺旋单元100旋转方向同理。纵向压缩该结构时,多个倾斜杆2趋于水平的过程中,推动上下相邻的xy平面方向的螺旋单元100旋转,且旋转方向互逆(顺时针/逆时针),当倾斜杆2完全水平时,在螺旋结构旋转后趋于半圆弧且单元结构尺寸减少。
36.请参见图8b和8c,所述倾斜杆2与所述螺旋臂1外端12的连接处3 内侧呈圆角设置,对节点处圆角处理可提高3d打印的可制造性,也有利用避免应力集中于节点引起的断裂。
37.请参见图5,通过建立三维阵列的负泊松比结构模型进行力学有限元仿真,本实用新型的三维负泊松比结构具有显著的负泊松比典型的形变特征,镜像阵列的倾斜杆2呈多重折线形,在压缩过程中倾斜杆2以折点为轴相互折叠接近,倾斜杆2长轴方向更接近水平。同时,倾斜杆2推动xy平面方向的螺旋结构进行旋转,导致负泊松比结构在水平向也收缩。负泊松比结构在z轴方向压缩时,在水平方向(x/y轴)也同时收缩。同理,反之,负泊松比结构在z轴方向拉伸时,在水平方向(x/y轴)也同时膨胀。
38.本实用新型的负泊松比结构已成功实现3d打印制造(图6b),显示出此结构对于3d打印的可制造性和显著的负泊松比结构形变特征(图6b、 d)。以往材料在垂直压缩过程中,样品将同时向水平方向膨胀。而负泊松比结构在垂直压缩过程中,样品反而在收缩(图6d)。在压缩实验中可明显观察到,随着垂直方向压缩应变的增加,样品向水平方向内收缩,两侧形成了内凹弧形(图6c,d)。
39.通过分析负泊松比结构力-位移曲线显示(图6a),负泊松比结构都为弯曲主导的力学响应。力-位移曲线特征表明负泊松比结构在形变过程中经历了弹性阶段、塑性阶段和致密化阶段。且在致密化阶段,实现材料最大限度的向受压中心区域集中,有利于在受压过程中受压区域材料的刚度和强度最大限度的提高,从而具有实现抗冲击或缓冲功能的潜力。负泊松比结构在较大压缩应变区间下具有十分平稳的平台应力,没有任何急剧塌陷和灾难性破坏。这体现出负泊松比结构设计的合理性,这为设计高应变或抗冲击功能器件提供了难得的机会。
40.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
41.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
42.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
