1.本发明涉及三维相机技术领域,具体为仿生可调双目三维相机。
背景技术:
2.三维照相在工业检测、医疗、建筑设计、航空航天和虚拟现实等领域有着广泛的应用。
3.例如在城镇建模方面发挥重要作用,尤其是发生自然灾害时,救援人员通过三维结构做出更合理的部署,文物保护一直以来是历史性难题,基于三维照相技术的文物重建中,已经取得了良好的效果。三维照相在医疗救护方面,能够快速发现患者的受伤部位,为医生提供技术支持,三维照相还能有效的推动无人作战和装备导航方面的发展。
4.目前市面上的双目三维相机,由于结构简单成本低,被运用在很多场景中,尤其是工业生产等各种无人环境领域,然而目前的三维相机焦距和角度均被固定,其可测量的范围有限,因此,不能做到像人的眼睛一样,可远可近,可左可右。
5.因此,现有双目三维相机存在问题,有待进一步改进和发展。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本发明提供了仿生可调双目三维相机,解决了目前市面上的双目三维相机,由于结构简单成本低,被运用在很多场景中,尤其是工业生产等各种无人环境领域,然而目前的三维相机焦距和角度均被固定,其可测量的范围有限,因此,不能做到像人的眼睛一样,可远可近,可左可右的问题。
8.(二)技术方案
9.为实现以上目的,本发明通过以下技术方案予以实现:仿生可调双目三维相机,包括第一相机与第二相机,所述两个相机在同一底座上,底座可以围绕第一相机透镜中心与第二相机透镜中心自由调节倾角和旋转角度,两个相机可以自由在底座上围绕第一相机透镜中心与第二相机透镜中心进行旋转。
10.优选的,所述第一相机与第二相机的底座和两相机透镜中心间的连线9平行,两相机透镜中心连线中点为中点,可以以第一相机透镜中心与第二相机透镜中心为圆心调节倾角加旋转,倾角可正可负,以初始角度为零角度,如以向上为正,向下为负,旋转角可正可负,以初始位置角度为零,向左为负,向右为正。
11.优选的,所述第一相机1与第二相机的焦距和像距可以分别精确调节并分别精确测量,所述第一相机与第二相机的角度为第一相机与第二相机的光轴与两相机透镜中心连线的夹角,所述第一相机与第二相机的光轴与两相机透镜中心连线的夹角分别为第一夹角θ1与第二夹角θ2。
12.优选的,根据需要观察的目标物体在第一相机与第二相机图像中出现的位置,调节底座的倾角和旋转角度,第一相机与第二相机的旋转角度,直到目标物体出现在第一相
机与第二相机各自的光心处,底座相对于初始位置,倾角为α,旋转角为β;两个相机的焦距和像距分别是f1、v1,和f2、v2;目标物体与两相机透镜中心间的连线的夹角为夹角γ,目标物体与两相机透镜中心间的连线的连线为第一物距,所述第一相机的物距为第二物距u1,所述第二相机物距为第三物距u2。
13.优选的,所述第一相机透镜中心与第二相机透镜中心位置为o,两个透镜中心之间距离为d,目标相对于两透镜中点位置o的空间距离为l。
14.优选的,所述目标物体与两相机透镜中心间的连线的夹角γ,角度范围为从0度到180度。
15.优选的,结合底座的倾角α和旋转角度β,目标物体与两透镜中心o的距离,以及目标物体与两透镜中点位置o连线与两透镜中心间的连线的中垂线的夹角γ,可以计算出目标物体空间三维坐标。
16.工作原理:将第一相机1和第二相机2固定在同一底座3上,固定之后的底座3可以围绕第一相机1和第二相机2的透镜中心调节倾角以及旋转,底座3与两个相机的透镜中心连线平行,其倾角和旋转角度可以精确测量,底座与初始位置之间倾角为α,底座与初始位置之间的旋转角度为β,两个相机在上述底座上,两个相机透镜中心距离为d,两个相机均可以在底座平面自由调节角度和焦距以及像距,其光轴与两相机透镜中心所在的连线之间角度可以精确测量,分别为θ1和θ2,两个相机的焦距可以精确控制,分别为f1和f2,像距可以精确控制,分别为v1和v2,两个相机透镜中心之间距离d,两个相机独立的角度θ1和θ2,两个像距f1和f2,两个像距v1和v2,可以计算出目标点与两相机透镜中心o的距离l,以及l与两相机透镜之间连线的角度
[0017][0018][0019]
再结合底座的倾角α,底座的旋转角β,可以得到目标点在空间的三维坐标
[0020]
其中α为倾角,相对于底座初始角度,可正可负,
[0021]
为偏离底座上两相机透镜中心连线的中垂线的角度,可正可负,l为目标物体距离另两透镜中心连线中心o的距离,当获得图像中所有空间点的三维坐标,即可获得深度值,当根据目标物体,改变以上底座的倾角和旋转角,改变相机的角度、焦距和像距时,可以满足我们的双目相机在更大范围内进行三维测距,从而进行三维重建,而不仅仅是局限在一小小的的空间范围内,从而扩大了相机的应用场景的适应性。
[0022]
(三)有益效果
[0023]
本发明提供了仿生可调双目三维相机。具备以下有益效果:
[0024]
1、本发明提供了适应性更强、可拍摄范围更广的双目三维相机,结构简单,成本低,结合当前双目三维相机的发展程度,一定会大幅度推动双目三维相机的应用。
附图说明
[0025]
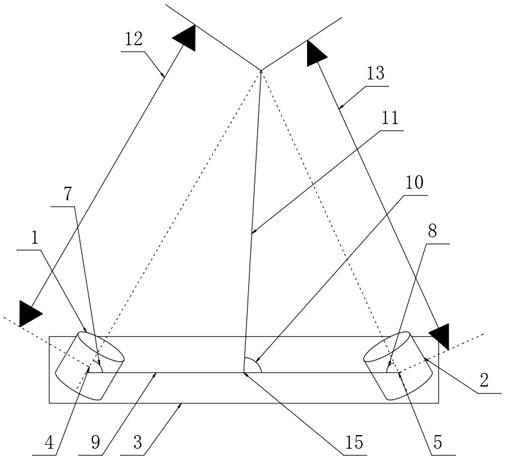
图1为本发明物距结构示意图;
[0026]
图2为本发明底座旋转结构示意图;
[0027]
其中,1、第一相机;2、第二相机;3、底座;4、第一相机透镜中心;5、第二相机透镜中心;6、旋转角;7、第一夹角θ1;8、第二夹角θ2;9、目标物体与两相机透镜中心间的连线;10、夹角γ;11、第一物距;12、第二物距u1;13、第三物距u2;14、初始位置;15、中点。
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0029]
实施例一:
[0030]
如图1-2所示,本发明实施例提供仿生可调双目三维相机,包括第一相机1与第二相机2,两个相机在同一底座3上,底座3可以围绕第一相机透镜中心4与第二相机透镜中心5自由调节倾角和旋转角度,两个相机可以自由在底座3上围绕第一相机透镜中心4与第二相机透镜中心5进行旋转,第一相机1与第二相机2的底座3和两相机透镜中心间的连线9平行,两相机透镜中心连线中点为中点15,可以以第一相机透镜中心4与第二相机透镜中心5为圆心调节倾角加旋转,倾角可正可负,以初始角度为零角度,如以向上为正,向下为负,旋转角可正可负,以初始位置角度为零,向左为负,向右为正,可以多方位,多角度的对两个相机位置进行调节,大大增加了三维相机的取像范围。
[0031]
实施例二:
[0032]
本实施例与实施例一的不同之处在于:第一相机1与第二相机2的焦距和像距可以分别精确调节并分别精确测量,第一相机1与第二相机2的角度为第一相机1与第二相机2的光轴与两相机透镜中心连线的夹角,第一相机1与第二相机2的光轴与两相机透镜中心连线的夹角分别为第一夹角θ17与第二夹角θ28,根据需要观察的目标物体在第一相机1与第二相机2图像中出现的位置,调节底座3的倾角和旋转角度,第一相机1与第二相机2的旋转角度,直到目标物体出现在第一相机1与第二相机2各自的光心处,底座3相对于初始位置14,倾角为α,旋转角6为β;两个相机的焦距和像距分别是f1、v1,和f2、v2;目标物体与两相机透镜中心间的连线9的夹角为夹角γ10,目标物体与两相机透镜中心间的连线9的连线为第一物距11,第一相机的物距为第二物距u112,第二相机物距为第三物距u213,第一相机透镜中心4与第二相机透镜中心5位置为o,两个透镜中心之间距离为d,目标相对于两透镜中点位置o的空间距离为l,目标物体与两相机透镜中心间的连线9的夹角γ10,角度范围为从0度到180度,结合底座的倾角α和旋转角度β,目标物体与两透镜中心o的距离,以及目标物体与两透镜中点位置o连线与两透镜中心间的连线9的中垂线的夹角γ,可以计算出目标物体空间三维坐标,提供了适应性更强、可拍摄范围更广的双目三维相机,结构简单,成本低,结合当前双目三维相机的发展程度,一定会大幅度推动双目三维相机的应用
[0033]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
