技术特征:
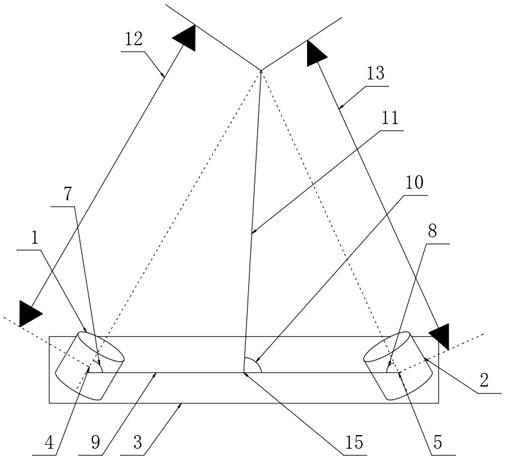
1.仿生可调双目三维相机,包括第一相机(1)与第二相机(2),其特征在于:所述两个相机在同一底座(3)上,底座(3)可以围绕第一相机透镜中心(4)与第二相机透镜中心(5)自由调节倾角和旋转角度,两个相机可以自由在底座(3)上围绕第一相机透镜中心(4)与第二相机透镜中心(5)进行旋转。2.根据权利要求1所述的仿生可调双目三维相机,其特征在于:所述第一相机(1)与第二相机(2)的底座(3)和两相机透镜中心间的连线(9)平行,两相机透镜中心连线中点为中点(1)(5),可以以第一相机透镜中心(4)与第二相机透镜中心(5)为圆心调节倾角加旋转,倾角可正可负,以初始角度为零角度,如以向上为正,向下为负,旋转角可正可负,以初始位置角度为零,向左为负,向右为正。3.根据权利要求1所述的仿生可调双目三维相机,其特征在于:所述第一相机(1)与第二相机(2)的焦距和像距可以分别精确调节并分别精确测量,所述第一相机(1)与第二相机(2)的角度为第一相机(1)与第二相机(2)的光轴与两相机透镜中心连线的夹角,所述第一相机(1)与第二相机(2)的光轴与两相机透镜中心连线的夹角分别为第一夹角
ɵ
(1)
(7)与第二夹角
ɵ
(2)
(8)。4.根据权利要求1所述的仿生可调双目三维相机,其特征在于:根据需要观察的目标物体在第一相机(1)与第二相机(2)图像中出现的位置,调节底座(3)的倾角和旋转角度,第一相机(1)与第二相机(2)的旋转角度,直到目标物体出现在第一相机(1)与第二相机(2)各自的光心处,底座(3)相对于初始位置(14),倾角为α,旋转角(6)为β;两个相机的焦距和像距分别是f1、v1,和f2、v2;目标物体与两相机透镜中心间的连线(9)的夹角为夹角γ(10),目标物体与两相机透镜中心间的连线(9)的连线为第一物距(11),所述第一相机的物距为第二物距(12),所述第二相机物距为第三物距(13)。5.根据权利要求1所述的仿生可调双目三维相机,其特征在于:所述第一相机透镜中心(4)与第二相机透镜中心(5)位置为o,两个透镜中心之间距离为d,目标相对于两透镜中点位置o的空间距离为l。6.根据权利要求4所述的仿生可调双目三维相机,其特征在于:所述目标物体与两相机透镜中心间的连线(9)的夹角γ(10),角度范围为从0度到180度。7.根据权利要求1所述的仿生可调双目三维相机,其特征在于:结合底座的倾角α和旋转角度β,目标物体与两透镜中心o的距离,以及目标物体与两透镜中点位置o连线与两透镜中心间的连线(9)的中垂线的夹角γ,可以计算出目标物体空间三维坐标。
技术总结
本发明提供仿生可调双目三维相机,涉及三维相机技术领域。该仿生可调双目三维相机,包括第一相机与第二相机,所述两个相机在同一底座上,底座可以围绕第一相机透镜中心与第二相机透镜中心自由调节倾角和旋转角度,两个相机可以自由在底座上围绕第一相机透镜中心与第二相机透镜中心(进行旋转。本发明提供了适应性更强、可拍摄范围更广的双目三维相机,结构简单,成本低,结合当前双目三维相机的发展程度,一定会大幅度推动双目三维相机的应用。一定会大幅度推动双目三维相机的应用。一定会大幅度推动双目三维相机的应用。
技术研发人员:王方聪 王鹏 刘贵鹏 姜兴东
受保护的技术使用者:珠海泰姆兰科技有限公司
技术研发日:2022.01.21
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。