1.本技术涉及建筑施工装置的技术领域,尤其是涉及一种钢管柱定位装置及其施工方法。
背景技术:
2.目前,地面桩柱施工通常采用全回转钻机进行钻孔,全回转钻机是由动力装置带动钻机回转装置转动,从而带动有钻头的钻杆转动,钻杆呈中空设置,由钻头切削土壤。
3.通过动力装置带动钻杆旋转,全回转钻机上的液压装置提供向下的垂直力使钻杆压入地下,形成护臂,通过外围设备间钻杆内土体取出,并下方钢管柱,灌入混凝土。在混凝土初凝时,通过吊车直接将全回转钻机以及钻杆吊出,供下一根桩下插钢管柱使用。
4.针对上述中的相关技术,发明人认为:通过吊车起吊全回转钻机和钻杆时容易产生晃动,并且钢管柱露出地面的部分高于全回转钻机,起吊过程中容易钻杆碰撞钢管柱,进而影响钢管柱的垂直度,有待改进。
技术实现要素:
5.为了解决吊车起吊全回转钻机和钻杆时钻杆容易碰撞钢管柱并影响钢管柱的垂直度的问题,本技术提供一种钢管柱定位装置及其施工方法。
6.第一方面,本技术提供的一种钢管柱定位装置采用如下的技术方案:一种钢管柱定位装置,包括底座、设置于底座上的全回转钻机和钻杆,所述底座上设置有供钻杆穿过的通孔,所述底座的四个边角处均设置有支撑脚,所述支撑脚上滑动设置有连接板,所述连接板上设置有支撑气缸,所述支撑气缸的活塞杆贯穿连接板与支撑脚连接,所述连接板的一侧设置有传动齿轮,所述支撑脚上设置有与传动齿轮相啮合的静齿形杆,所述底座上设置有与传动齿轮相啮合的动齿形杆。
7.通过采用上述技术方案,通过启动支撑气缸,支撑气缸的活塞杆抵接支撑脚上端,进而带动连接板沿竖直方向向上运动,使传动齿轮沿静齿形杆的长度方向向上运动并自转,传动齿轮自转带动齿形杆向上运动,动齿形杆带动底座向上运动,以实现通过支撑气缸同时增大或减小连接板与支撑脚以及底座之间的距离,以实现全回转钻机、钻杆的向上稳定抬升,有效减少钻杆对钢管柱的碰撞,进而确保钢管柱的垂直度,最后通过吊车将抬升后的全回转钻机、钻杆连同底座向上吊起,直至支撑脚的下端高于钢管柱的上端,并将全回转钻机、钻杆朝下一根桩移动。
8.可选的,位于同一轴心线的两个所述传动齿轮之间设置有传动杆,两个所述传动齿轮分别轴向设置于传动杆的两端,所述传动杆转动设置于相对应的连接板上,位于底座同一侧的两个所述传动齿轮之间设置有齿形带。
9.通过采用上述技术方案,传动杆使两端的传动齿轮同步转动,两个齿轮通过齿形带同步转动,以实现四个支撑脚上的四个传动齿轮同步转动,以减少因为四个支撑气缸之间的运动误差造成底座抬升不平稳,有效提高底座抬升的稳定性,进一步减少钻杆与钢管
柱的碰撞。
10.可选的,所述连接板与支撑脚的上端均设置有限位槽,所述限位槽内对称设置有限位杆,所述连接板与底座的下端均设置有限位块,所述限位块的下端对称设置有两个转动杆,所述转动杆一端与限位块转动设置、另一端转动设置有滑动块,所述滑动块滑动设置于相对应的限位杆上,所述滑动块与限位槽的槽壁之间设置有复位弹簧,所述复位弹簧的一端与滑动块连接、另一端与限位槽的槽壁连接。
11.通过采用上述技术方案,当连接板向上运动时,连接板与支撑脚、底座的距离增加,限位杆与限位块相对转动,限位杆带动滑动块沿限位杆的长度方向朝远离复位弹簧的方向运动,复位弹簧受力产生弹性形变且拉伸,复位弹簧作用于限位块上以减缓限位块运动的速度,提高在支撑气缸的作用连接板、底座运动的稳定性;当连接板向下运动时,复位弹簧弹性复位带动限位块朝靠近自身的方向运动,可选的,所述限位槽远离复位弹簧的一侧设置有让位槽,所述让位槽内设置有限位弹簧,所述限位弹簧的一端与让位槽的槽壁连接、另一端能够与滑动块抵接。
12.通过采用上述技术方案,当限位块朝远离复位弹簧的方向运动一定距离时,抵接限位弹簧与限位块抵接,以限制限位块朝远离复位弹簧的方向过度运动,防止连接板向下运动时,限位块因过度滑动而继续朝远离复位弹簧的方向运动。
13.可选的,所述支撑脚的一侧设置有导向杆,所述连接板和底座上均设置有导向块,所述导向块上设置有供导向杆穿过的导向槽。
14.通过采用上述技术方案,导向杆与导向块的滑动连接,连接板、底座的运动起到导向和限位的作用。
15.可选的,所述支撑脚的上端设置有与支撑气缸相对应的滑动槽,所述滑动槽内设置有沿滑动槽的延伸方向滑动的抵接块,所述滑动槽的槽底设置有第一操作槽,所述抵接块上设置有抵接杆,所述抵接杆滑动设置于第一操作槽内,所述支撑脚的侧壁上设置有与第一操作槽相连通的第二操作槽,所述第二操作槽内滑动设置有支撑杆,所述支撑杆能够与抵接杆抵接,所述支撑杆的端部能够伸出第二操作槽与支撑脚的下端位于同一平面,所述支撑气缸的活塞杆上设置有能够与抵接块抵接的操作块,所述操作块能够滑动于滑动槽内。
16.通过采用上述技术方案,当支撑气缸的活塞杆运动,操作块插入滑动槽内并抵接抵接块,使抵接块朝滑动槽内运动,抵接杆沿第一操作槽的延伸方向向下运动,抵接杆抵接支撑杆,使支撑杆沿第二操作槽的延伸方向伸出支撑脚的侧壁,支撑杆的端部与地面接触并与支撑脚的下端位于同一平面,进而提高支撑脚与地面接触的面积,提高支撑脚的稳定性。
17.可选的,所述滑动槽的槽底设置有支撑弹簧,所述支撑弹簧的一端与滑动槽的槽底连接、另一端与抵接块连接,所述第二操作槽的槽壁上设置有定位槽,所述支撑杆上设置有滑动于定位槽内的定位块,所述定位槽内设置有限位弹簧,所述限位弹簧的一端与定位槽的槽壁连接、另一端与定位块连接。
18.通过采用上述技术方案,抵接块朝滑动槽内运动时,支撑弹簧受力产生弹性形变并压缩,抵接杆抵接支撑杆运动时,带动定位块运动,限位弹簧受力产生弹性形变并拉伸;当支撑气缸驱动带动连接板向下运动,直到连接板与支撑脚的上端抵接,支撑气缸带动操
作块朝远离抵接块的方向运动,支撑弹簧弹性复位带动抵接块朝远离滑动槽的方向运动,抵接杆与逐渐与支撑杆分离,限位弹簧弹性复位带动定位块,进而带动支撑杆朝第二操作槽内运动。
19.可选的,所述通孔的周向孔壁上设置有多个嵌槽,所述嵌槽内转动设置有钢球,所述嵌槽的槽口朝外侧逐渐收缩形成收口结构,所述钢球的表面能够从嵌槽的槽口处凸出且抵接于钻杆。
20.通过采用上述技术方案,钢球抵接于钻杆的周向侧壁上,较少钻杆与通孔的孔壁的摩擦阻力,提高钻杆向上运动的流畅性。
21.可选的,所述导向块上螺纹连接有固定螺栓,当所述固定螺栓拧紧时,所述固定螺栓与导向杆抵接。
22.通过采用上述技术方案,当钻杆的下端高于钢管柱的上端时,拧紧固定螺栓,固定螺栓抵接于导向杆上,以限制导向块在导向杆上的滑动。
23.第二方面,本技术提供的一种钢管柱定位装置的施工方法采用如下的技术方案:一种施工方法,包括以下步骤:s1全回转钻机、钻杆抬升:启动支撑气缸以驱动连接板向上运动,连接板带动传动齿轮沿静齿形杆的长度方向运动并自转,传动齿轮转动带动动齿形杆向上运动,动齿形杆带动底座向上运动,直至钻杆的下端高于钢管柱的上端;s2全回转钻机、钻杆转移:通过吊车将抬升后的全回转钻机、钻杆连同底座向上吊起,直至支撑脚的下端高于钢管柱的上端,并将全回转钻机、钻杆朝下一根桩移动。
24.通过采用上述技术方案,通过启动支撑气缸,支撑气缸的活塞杆抵接支撑脚上端,进而带动连接板沿竖直方向向上运动,使传动齿轮沿静齿形杆的长度方向向上运动并自转,传动齿轮自转带动齿形杆向上运动,动齿形杆带动底座向上运动,将底座抬升,同时使钻机的下端高于钢管柱的上端,通过吊车将抬升后的全回转钻机、钻杆连同底座向上吊起,直至支撑脚的下端高于钢管柱的上端,并将全回转钻机、钻杆朝下一根桩移动,有效减少对钢管柱的碰撞,进而确保钢管柱的垂直度。
25.综上所述,本技术包括以下至少一种有益技术效果:1、通过启动支撑气缸,支撑气缸的活塞杆抵接支撑脚上端,进而带动连接板沿竖直方向向上运动,使传动齿轮沿静齿形杆的长度方向向上运动并自转,传动齿轮自转带动齿形杆向上运动,动齿形杆带动底座向上运动,以实现通过支撑气缸同时增大或减小连接板与支撑脚以及底座之间的距离,以实现全回转钻机、钻杆的向上稳定抬升,有效减少钻杆对钢管柱的碰撞,进而确保钢管柱的垂直度,最后通过吊车将抬升后的全回转钻机、钻杆连同底座向上吊起,直至支撑脚的下端高于钢管柱的上端,并将全回转钻机、钻杆朝下一根桩移动;2、传动杆使两端的传动齿轮同步转动,两个齿轮通过齿形带同步转动,以实现四个支撑脚上的四个传动齿轮同步转动,以减少因为四个支撑气缸之间的运动误差造成底座抬升不平稳,有效提高底座抬升的稳定性,进一步减少钻杆与钢管柱的碰撞。
附图说明
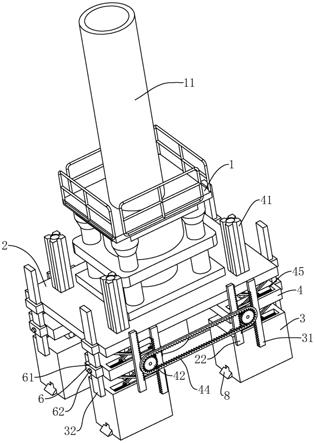
26.图1是本技术实施例的整体结构示意图;
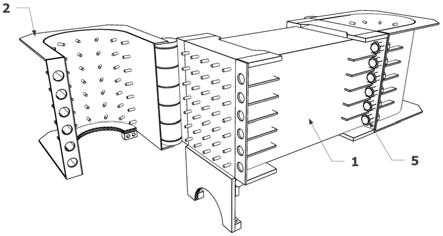
图2是本技术实施例的底座和支撑脚的结构示意图;图3是本技术实施例的连接板的结构示意图;图4是本技术实施例的局部结构示意图;图5是本技术实施例的局部剖视结构示意图。
27.附图标记说明:1、全回转钻机;11、钻杆;2、底座;21、通孔;22、动齿形杆;23、限位块;24、嵌槽;25、钢球;3、支撑脚;31、静齿形杆;32、导向杆;33、滑动槽;34、第一操作槽;35、第二操作槽;36、支撑弹簧;37、定位槽;4、连接板;41、支撑气缸;42、传动齿轮;43、传动杆;44、齿形带;45、限位槽;46、限位杆;47、让位槽;48、限位弹簧;49、操作块;5、转动杆;51、滑动块;52、复位弹簧;6、导向块;61、导向槽;62、固定螺栓;7、抵接块;71、抵接杆;8、支撑杆;81、定位块;82、定位弹簧。
具体实施方式
28.以下结合附图1-5对本技术作进一步详细说明。
29.本技术实施例公开了一种钢管柱定位装置。
30.参照图1和图2,一种钢管柱定位装置,包括底座2、安装于底座2上的全回转钻机1和钻杆11,底座2上端贯穿开设有供钻杆11穿过的通孔21,底座2下端的四个边角处均固定连接有支撑脚3,每个支撑脚3的正上方滑动连接有一个连接板4,连接板4位于支撑脚3与底座2之间。
31.参照图3和图4,连接板4上端固定连接有支撑气缸41,支撑气缸41的活塞杆沿竖直方向贯穿连接板4且与支撑脚3上端抵接,连接板4的一侧转动连接有传动齿轮42,支撑脚3靠近传动齿轮42的侧壁上固定连接有与传动齿轮42相啮合的静齿形杆31,底座2靠近传动齿轮42的侧壁上固定连接有与传动齿轮42相啮合的动齿形杆22。
32.参照图2、图3和图4,相对的两个连接板4上位于同一轴心线上的两个传动齿轮42之间连接有传动杆43,传动杆43的两端贯穿相对应的连接板4的相对侧壁,且传动杆43绕自身轴心线转动连接于两个连接板4之间,两个传动齿轮42分别轴向固定连接于传动杆43的两端,位于底座2同一侧的两个传动齿轮42之间连接有齿形带44,两个传动齿轮42均与齿形带44啮合,以实现两个传动齿轮42的联动。
33.参照图2、图3和图4,连接板4与支撑脚3的上端均开设有限位槽45,限位槽45相向槽壁之间对称且交错固定连接有两个限位杆46。连接板4与底座2的下端均固定连接有限位块23,底座2下端的限位块23的数量和位置与连接板4相对应,限位块23的下端对称转动连接有两个转动杆5,转动杆5一端与限位块23铰接、另一端铰接有滑动块51,滑动块51沿限位杆46的长度方向滑动连接于相对应的限位杆46上,滑动块51与限位槽45的槽壁之间连接有套设于限位杆46上的复位弹簧52,复位弹簧52的一端与滑动块51的相对应的端部固定连接、另一端与限位槽45的槽壁固定连接。当连接板4与支撑脚3和底座2相抵接时,限位块23插入限位槽45内,转动杆5也位于限位槽45内。
34.参照图2、图3和图4,限位槽45远离复位弹簧52的槽壁上开设有让位槽47,让位槽47内连接有沿让位槽47的延伸方向延伸的限位弹簧48,限位弹簧48的一端与让位槽47的槽壁固定连接、另一端伸出让位槽47。滑动块51朝远离复位弹簧52的方向运动时,滑动块51能够与限位弹簧48相抵接。
35.参照图2、图3和图4,支撑脚3的一侧壁上固定连接有沿竖直方向延伸的导向杆32,连接板4和底座2靠近导向杆32的侧壁上均固定连接有导向块6,导向块6上贯穿开设有供导向杆32穿过的导向槽61。导向块6远离连接板4或底座2的侧壁上贯穿开设有螺纹孔,螺纹孔内螺纹连接有固定螺栓62,固定螺栓62拧紧时,固定螺栓62的杆部抵接于导向杆32上。
36.参照图4和图5,底座2上端开设有与支撑气缸41相对齐的滑动槽33,滑动槽33内滑动连接有沿滑动槽33的延伸方向滑动的抵接块7,滑动槽33的槽底开设有延伸竖直方向延伸的第一操作槽34,抵接块7的下端一体成型有插入并滑动于第一操作槽34内的抵接杆71。支撑脚3的侧壁上开设有与第一操作槽34相连通的第二操作槽35,第二操作槽35呈向下倾斜延伸,第二操作槽35内滑动连接有支撑杆8,支撑杆8朝向抵接杆71的端部能够伸入第一操作槽34内与抵接杆71抵接,支撑杆8远离抵接杆71的端部能够伸出支撑脚3的侧壁并与地面抵接,使得支撑杆8的下端与支撑脚3的下端处于同一平面。
37.参照图4和图5,支撑气缸41的活塞杆的端部固定连接有滑动于滑动槽33内的操作块49,滑动槽33的槽底间隔连接有多个支撑弹簧36,支撑弹簧36的一端与滑动槽33的槽底固定连接、另一端与抵接块7相对应的端部固定连接。第二操作槽35的槽壁上开设有沿第二操作槽35的延伸方向延伸的定位槽37,支撑杆8靠近定位槽37的侧壁上固定连接有滑动于定位槽37内的定位块81,定位槽37内连接有定位弹簧82,定位弹簧82的一端与定位块81的相对应的端部固定连接、另一端与定位槽37的槽壁固定连接。
38.参照图2,通孔21的周向孔壁上间隔开设有多个嵌槽24,嵌槽24的数量根据实际情况进行选择。嵌槽24内转动连接有钢球25,在钢球25进入嵌槽24内后对嵌槽24的槽口朝外侧逐渐收缩形成收口结构,钢球25的部分表面能够从嵌槽24的槽口处凸出且抵接于钻杆11的周向侧壁上。
39.本技术实施例一种钢管柱定位装置的实施原理为:通过启动支撑气缸41,支撑气缸41的活塞杆抵接支撑脚3上端,进而带动连接板4沿竖直方向向上运动,使传动齿轮42沿静齿形杆31的长度方向向上运动并自转,传动齿轮42自转带动齿形杆22向上运动,动齿形杆22带动底座2向上运动。同时操作块49插入滑动槽33内并抵接抵接块7,使抵接块7朝滑动槽33内运动,抵接杆71沿第一操作槽34的延伸方向向下运动,抵接杆71抵接支撑杆8,使支撑杆8沿第二操作槽35的延伸方向伸出支撑脚3的侧壁,支撑杆8的端部与地面接触并与支撑脚3的下端位于同一平面。
40.并且当连接板4向上运动时,连接板4与支撑脚3、底座2的距离增加,限位杆46与限位块23相对应的,限位杆46带动滑动块51沿限位杆46的长度方向朝远离复位弹簧52的方向运动,复位弹簧52受力产生弹性形变且拉伸。
41.以实现通过支撑气缸41同时增大或减小连接板4与支撑脚3以及底座2之间的距离,以实现全回转钻机1、钻杆11的向上稳定抬升,有效减少对钢管柱的碰撞,进而确保钢管柱的垂直度。
42.最后通过吊车将抬升后的全回转钻机1、钻杆11连同底座2向上吊起,直至支撑脚3的下端高于钢管柱的上端,并将全回转钻机1、钻杆11朝下一根桩移动。
43.本技术实施例还公开了一种钢管柱定位装置的施工方法。施工方法包括以下步骤:s1全回转钻机1、钻杆11抬升:启动支撑气缸41以驱动连接板4向上运动,连接板4
带动传动齿轮42沿静齿形杆31的长度方向运动并自转,传动齿轮42转动带动动齿形杆22向上运动,动齿形杆22带动底座2向上运动,直至钻杆11的下端高于钢管柱的上端;s2全回转钻机1、钻杆11转移:通过吊车将抬升后的全回转钻机1、钻杆11连同底座2向上吊起,直至支撑脚3的下端高于钢管柱的上端,并将全回转钻机1、钻杆11朝下一根桩移动。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。