1.本发明涉及生物仿真技术领域,特别涉及一种直道途中跑躯干的评价方法及终端。
背景技术:
2.我们知道在跑步过程中,不仅下肢通过摆动能够获得足-支撑面之间的反弹力,同时上肢摆动同样能够获得足-支撑面反弹力,四肢摆动都是围绕躯干展开的。因此,躯干的首要功能是稳定。在人体静态稳定评价中,压力中心(center of pressure,cop)指标是金标准;在动态稳定评价中,基于cop构成的“蝴蝶图”解读稳定性也是不可或缺的方法。借鉴静态稳定分析、动态稳定分析的cop都是计算得来的,因此,躯干的稳定性分析也用类似的参数——虚拟转动点(virtual turning point,vtp)来评价。
3.vtp可以通过两种方法计算获得,一种是正向动力学方法,另外一种是逆向动力学方法。如何把正向动力学计算方法与逆向动力学方法结合起来,实现直道途中跑躯干稳定性评价是亟待解决的技术问题。
技术实现要素:
4.本发明所要解决的技术问题是:提供一种直道途中跑躯干的评价方法及终端,能够对直道途中跑的躯干稳定性进行评价。
5.为了解决上述技术问题,本发明采用的技术方案为:
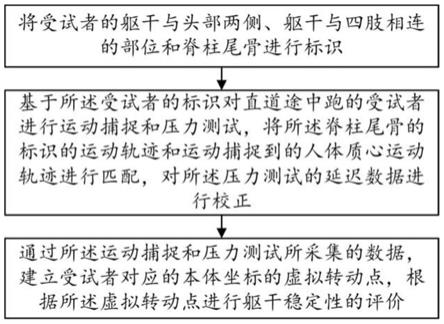
6.一种直道途中跑躯干的评价方法,包括步骤:
7.将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识;
8.基于所述受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正;
9.通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据所述虚拟转动点进行躯干稳定性的评价。
10.为了解决上述技术问题,本发明采用的另一技术方案为:
11.一种直道途中跑躯干的评价终端,包括存储器、处理器以及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
12.将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识;
13.基于所述受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正;
14.通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据所述虚拟转动点进行躯干稳定性的评价。
15.本发明的有益效果在于:将受试者的躯干与头部两侧、躯干与四肢相连的部位和
脊柱尾骨进行标识,便于对躯干运动进行简化;基于受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,其中,将脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对压力测试的延迟数据进行校正,能够解决现有技术中压力测试数据延迟的问题;通过运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据虚拟转动点进行躯干稳定性的评价,从而实现直道途中跑的躯干稳定性评价。
附图说明
16.图1为本发明实施例的一种直道途中跑躯干的评价方法的步骤流程图;
17.图2为本发明实施例的一种直道途中跑躯干的评价终端的结构示意图;
18.图3为运动捕捉系统与压力测试系统同时进行时压力测试的延迟的示意图;
19.图4为受试者一个摆臂周期中六个本体坐标的vtp图;
20.图5为实施例二中受试者的自主落地方式的足底压力图;
21.图6为实施例二中受试者的外侧弓落地方式的足底压力图;
22.图7为实施例二中受试者的压力分布图;
23.图8为实施例二中受试者的12秒单个足压力图;
24.图9为实施例二中受试者的步态参数图;
25.图10为实施例二中受试者的压力中心分析图;
26.图11为实施例二中受试者的力和压力图;
27.图12为实施例二中7名精英短跑运动员3米配速时的正向动力学的示意图;
28.图13为实施例二中受试者自主落地的正向动力学的示意图;
29.图14为实施例二中受试者按照155步/分钟的步频时正向动力学的示意图;
30.图15为实施例二中受试者按照155步/分钟的步频,外侧弓落地方式时正向动力学的示意图;
31.图16为实施例二中以肘关节为例,自主落地方式时,本体坐标系x轴数值的变化图;
32.图17为实施例二中以肘关节为例,自主落地方式时,本体坐标系y轴数值的变化图;
33.图18为实施例二中以肘关节为例,自主落地方式时,本体坐标系z轴数值的变化图;
34.图19为实施例二中以肘关节为例,外侧弓落地方式时,本体坐标系x轴数值的变化图;
35.图20为实施例二中以肘关节为例,外侧弓落地方式时,本体坐标系y轴数值的变化图;
36.图21为实施例二中以肘关节为例,外侧弓落地方式时,本体坐标系z轴数值的变化图;
37.图22为实施例二中受试者的点杆框架模型图;
38.标号说明:
39.1、一种直道途中跑躯干的评价终端;2、存储器;3、处理器。
具体实施方式
40.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
41.请参照图1、图3和图4,本发明实施例提供了一种直道途中跑躯干的评价方法,包括步骤:
42.将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识;
43.基于所述受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正;
44.通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据所述虚拟转动点进行躯干稳定性的评价。
45.从上述描述可知,将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识,便于对躯干运动进行简化;基于受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,其中,将脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对压力测试的延迟数据进行校正,能够解决现有技术中压力测试数据延迟的问题;通过运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据虚拟转动点进行躯干稳定性的评价,从而实现直道途中跑的躯干稳定性评价。
46.进一步地,所述将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识包括:
47.将受试者躯干关联的运动结构简化为包含双耳、双肩、双髋和躯干的点杆结构,并且在受试者的头部两侧、两侧上肢与躯干相连的部位、两侧下肢与躯干相连的部位以及脊柱尾骨进行标识。
48.由上述描述可知,把双耳、双肩、双髋和躯干简化为点杆结构,并对躯干关联的运动部位进行标识,从而将直道途中跑时躯干的技术特征分析简化为刚性框架结构的稳定性问题,便于后续进行躯干稳定性的评价。
49.进一步地,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正包括:
50.采用正向动力学,基于所述脊柱尾骨的标识的运动轨迹与人体质心运动轨迹一致的特征,将所述压力测试的数据与所述运动捕捉的数据进行匹配;
51.根据匹配结果进行所述压力测试的延迟数据进行校正。
52.由上述描述可知,采用正向动力学,基于脊柱尾骨的标识的运动轨迹与人体质心运动轨迹一致的特征进行数据匹配,因此无需同步即可实现运动捕捉系统和压力测试系统相联合的基准测试。
53.进一步地,通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点包括:
54.计算骨性标志本体坐标的虚拟转动点:
[0055][0056]
式中xi、yi、zi分别表示虚拟转动点相对惯性参考系的坐标,xo、yo、zo分别表示虚拟
转动点的本体坐标原点,n表示采集的数量。
[0057]
由上述描述可知,计算本体坐标的虚拟转动点,便于后续基于虚拟转动点进行躯干稳定性的评价。
[0058]
进一步地,根据所述虚拟转动点进行躯干稳定性的评价包括:
[0059]
对虚拟转动点的位置坐标进行变换:
[0060]
x
′i=(x
i-xo),y
′i=(y
i-yo),z
′i=(z
i-zo);
[0061]
式中xi、yi、zi分别表示虚拟转动点相对惯性参考系的坐标,xo、yo、zo分别表示虚拟转动点的本体坐标原点,x
′i、y
′i、z
′i分别表示变换后的虚拟转动点坐标;
[0062]
计算变换后的虚拟转动点坐标的均方差:
[0063][0064]
式中xi、yi、zi分别表示变换后的虚拟转动点位置坐标,d
x
、dy、dz分别表示均方差;
[0065]
根据计算得到的所述均方差得到躯干稳定性的评价结果。
[0066]
由上述描述可知,对虚拟转动点的位置坐标进行变换,并根据变换后的虚拟转动点坐标进行均方差计算,均方差越小稳定性越高,从而能够快速得到躯干稳定性的评价结果。
[0067]
请参照图2,本发明实施例提供了一种直道途中跑躯干的评价终端,包括存储器、处理器以及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0068]
将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识;
[0069]
基于所述受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正;
[0070]
通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据所述虚拟转动点进行躯干稳定性的评价。
[0071]
由上述描述可知,将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识,便于对躯干运动进行简化;基于受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,其中,将脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对压力测试的延迟数据进行校正,能够解决现有技术中压力测试数据延迟的问题;通过运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据虚拟转动点进行躯干稳定性的评价,从而实现直道途中跑的躯干稳定性评价。
[0072]
进一步地,所述将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识包括:
[0073]
将受试者躯干关联的运动结构简化为包含双耳、双肩、双髋和躯干的点杆结构,并且在受试者的头部两侧、两侧上肢与躯干相连的部位、两侧下肢与躯干相连的部位以及脊柱尾骨进行标识。
[0074]
由上述描述可知,把双耳、双肩、双髋和躯干简化为点杆结构,并对躯干关联的运动部位进行标识,从而将直道途中跑时躯干的技术特征分析简化为刚性框架结构的稳定性问题,便于后续进行躯干稳定性的评价。
[0075]
进一步地,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正包括:
[0076]
采用正向动力学,基于所述脊柱尾骨的标识的运动轨迹与人体质心运动轨迹一致的特征,将所述压力测试的数据与所述运动捕捉的数据进行匹配;
[0077]
根据匹配结果进行所述压力测试的延迟数据进行校正。
[0078]
由上述描述可知,采用正向动力学,基于脊柱尾骨的标识的运动轨迹与人体质心运动轨迹一致的特征进行数据匹配,因此无需同步即可实现运动捕捉系统和压力测试系统相联合的基准测试。
[0079]
进一步地,通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点包括:
[0080]
计算骨性标志本体坐标的虚拟转动点:
[0081][0082]
式中xi、yi、zi分别表示虚拟转动点相对惯性参考系的坐标,xo、yo、zo分别表示虚拟转动点的本体坐标原点,n表示采集的数量。
[0083]
由上述描述可知,计算本体坐标的虚拟转动点,便于后续基于虚拟转动点进行躯干稳定性的评价。
[0084]
进一步地,根据所述虚拟转动点进行躯干稳定性的评价包括:
[0085]
对虚拟转动点的位置坐标进行变换:
[0086]
x
′i=(x
i-xo),y
′i=(y
i-yo),z
′i=(z
i-zo);
[0087]
式中xi、yi、zi分别表示虚拟转动点相对惯性参考系的坐标,xo、yo、zo分别表示虚拟转动点的本体坐标原点,x
′i、y
′i、z
′i分别表示变换后的虚拟转动点坐标;
[0088]
计算变换后的虚拟转动点坐标的均方差:
[0089][0090]
式中xi、yi、zi分别表示变换后的虚拟转动点位置坐标,d
x
、dy、dz分别表示均方差;
[0091]
根据计算得到的所述均方差得到躯干稳定性的评价结果。
[0092]
由上述描述可知,对虚拟转动点的位置坐标进行变换,并根据变换后的虚拟转动点坐标进行均方差计算,均方差越小稳定性越高,从而能够快速得到躯干稳定性的评价结果。
[0093]
本发明上述的一种直道途中跑躯干的评价方法及终端,适用于体育学领域的运动人体科学、运动训练、体育教育学等专业的运动技能学习与控制;生物医学工程领域中的生物力学、运动康复工程领域中的步态分析与控制;以及医学领域中的运动康复、运动医学领域中运动处方设计的步态分析与控制。能够对直道途中跑躯干进行稳定性的定量评价。以下通过具体的实施方式进行说明:
[0094]
实施例一
[0095]
请参照图1、图3和图4,一种直道途中跑躯干的评价方法,包括步骤:
[0096]
s1、将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识。
[0097]
具体的,直道途中跑躯干的技术特征是:人体的头、四肢通过关节与躯干连接形成
非封闭的多刚体链系结构,这意味着人体的运动系统是复杂系统。对于复杂系统的分析,系统的功能应注重于个体之间的相互作用。
[0098]
因此,需要对直道途中跑技术的人体运动过程进行分析,建立躯干的运动学、动力学方程。首先,对躯干和头的结构进行简化,忽略四肢的运动;然后,把双耳、双肩、双髋和躯干简化为点杆结构。这样一来,直道途中跑时躯干的技术特征分析就简化为刚性框架结构的稳定性问题。
[0099]
在本实施例中,根据人体骨性标志(bony landmarks)分别在受试者的头部两侧、两侧胸锁关节之间的凹陷和股骨大转子处贴上标识点,在受试者脊柱尾骨处贴上一个标识点。
[0100]
s2、基于所述受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,将所述脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对所述压力测试的延迟数据进行校正。
[0101]
具体的,运动捕捉系统与测力台系统相结合进行人体运动数据采集很常见。其技术特征是运动捕捉系统与测力台系统都是属于a/d转换在前端,计算机接受已处理的数据,延时一般在几个毫秒级,因此两套设备可以实现同步采集。而压力测试系统因为采集数量巨大,无法在前端实时完成处理数据。例如,拥有10240个传感器的压力测试系统,采集频率可达到300hz,采集数据为64位的浮点数,而一般的工作站cpu处理速度只有几个ghz。另外,一般64位的计算机,在其数据总线上还要输送其他数据,在理想状态下,基于ubs3.0的外设数据接口也只能传输大约100mb/s的数据。因此,请参照图3,受试者已经腾空,但压力数据依然有显示,即压力测试系统不能实现一边采集一边处理。
[0102]
本实施例中,对受试者进行运动捕捉和压力测试,其中采用正向动力学方法,基于尾骨标识点与人体质心变化规律一致的特征,解决运动捕捉系统与压力测试系统的同步问题,可称之为软同步。
[0103]
运动捕捉系统对采集人体关节的运动学数据有其得天独厚的优势,但在计算人体质心运动学规律时,需要人体环节惯性参数。因为肌肉收缩,人体惯性参数的最大特点是随着环节的运动而改变。压力测试系统可以采集足-支撑面之间相互作用的压力。不仅可以获得足底压力分布、蝴蝶图和步宽,还能获得垂直地面反作用力。采用垂直反作用力通过正向动力学方法能获得质心的运动学规律。质心在垂直方向的机械能消耗是评价跑步技术的金标准,而关节运动规律是改进技术的具体措施。对于直道途中跑躯干的技术范式与虚拟仿真分析,运动捕捉系统和压力测试系统缺一不可。
[0104]
s3、通过所述运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,根据所述虚拟转动点进行躯干稳定性的评价。
[0105]
具体的,请参照图3,在本实施例中需要建立头左右两侧、上肢左右两侧以及下肢左右两侧,共六个本体坐标的虚拟转动点(virtual turning point,vtp);建立本体坐标的vtp运动学、动力学的定量评价方法。
[0106]
其中,图4中a为右手前摆的结束时刻,也即右手后摆的开始时刻的正视图。b为右手前摆的结束时刻,也即右手后摆的开始时刻的右视图。c为右手前摆的开始时刻,也即右手后摆的结束时刻的正视图。d为右手前摆的开始时刻,也即右手后摆的结束时刻的右视图。
[0107]
s31、计算骨性标志本体坐标的vtp:
[0108][0109]
式中xi、yi、zi分别表示vtp相对惯性参考系的坐标,xo、yo、zo分别表示vtp的本体坐标原点,n表示采集的数量。
[0110]
s32、对vtp的位置坐标进行变换:
[0111]
x
′i=(x
i-xo),y
′i=(y
i-yo),z
′i=(z
i-zo);
[0112]
式中xi、yi、zi分别表示vtp相对惯性参考系的坐标,xo、yo、zo分别表示vtp的本体坐标原点,x
′i、y
′i、z
′i分别表示变换后的vtp坐标。
[0113]
s33、评价双侧的技术优劣:
[0114][0115]
式中xi、yi、zi分别表示变换后的vtp位置坐标,d
x
、dy、dz分别表示均方差。通过均方差的数值,把离散度与稳定性匹配起来,实现直道途中跑躯干技术特征的定量评价。
[0116]
实施例二
[0117]
请参照图5至图22,本实施例与实施例一的不同之处在于,根据具体案例基于运动捕捉数据进行虚拟仿真分析:
[0118]
测试设备:18个镜头的qualisys动作捕捉系统(1200万像素,能够进行实时的2d/3d和6dof运动捕捉);zebris-hp cosmos treadmill虚拟反馈式的步态与跑态协调训练系统(传感器数目:10240)。
[0119]
在本实施例中,通过自主与外侧弓落地方式分析,对受试者的跑步技术进行诊断并给出优化建议。
[0120]
请参照图5和图6,受试者外侧弓落地方式比自主落地方式压力峰值小,但峰值饱满度增加。由此揭示出韦安德的:“速度的秘密是绷紧脚踝,增大对地面的作用力就能提高跑速”学说是有局限性,应该是增大力与时间的乘积,而非最大力值本身。
[0121]
请参照图7,从动力学测试报告中压力分布报告可以得到:外侧弓落地方式,足跟压力分布减小(左侧110-100;右侧114-101),值得注意的是外侧弓落地方式左右侧更加对称。由此可见,外侧弓落地方式优于自主落地方式。
[0122]
请参照图8,根据12秒单个足压力的报告可以得到:配速3米/秒,12秒跑了约36米。与平均压力分布一致:外侧弓落地方式的左右侧压力分布更加对称。
[0123]
请参照图9,根据步态参数报告可以得到:外侧弓落地方式的步长减小,效率更高。
[0124]
请参照图10,根据压力分析报告可以得到:外侧弓落地方式的左侧步态线更密,这意味着更加稳定。
[0125]
请参照图11,根据力与压力的报告可以得到:外侧弓落地方式的左侧最大力值由1719.9n减小到1574.5n;左侧最大力值有1679.9n减小到1578.4n,左右侧的差异值由40n减小到3.9n。这意味着更对称与稳定。
[0126]
请参照图12和图13,受试者与7名精英短跑运动员3米配速时的垂直反作用力分布是存在差异的,一是力的分布不够饱满,二是力的最大值偏小。请参照图14,受试者按照155步/分钟的步频,与原有的步态模式相比,垂直地面反弹力增大了,与7名精英短跑运动员的
接近了,但是峰值过于尖锐,力与时间乘积不够大。请参照图15,受试者按照155步/分钟的步频,外侧弓落地方式,改变落地模式后,垂直地面反弹力的分布优于美国的7名短跑运动员。在峰值处非常饱满,以156步/分钟的步频,在垂直地面反弹力峰值只有大约2.5倍体重的时候就能完成3米/秒的配速。
[0127]
而基于qualisys运动捕捉系统采用本实施例的vtp方法对受试者的技术进行影像解析:在拍摄频率1500hz,拍摄时长12秒时,请参照图16至图18,为了简单且能说明问题,以肘关节为例,自主落地方式下,左侧肘部在x,y,z三个方向位移的均方差分别11.35、5.25、8.07;右侧肘部三个方向位移的均方差分别10.76、4.82、7.95;左侧比右侧分别大了5.51%、9.12%、1.57%。因此,左侧需要加强稳定性练习。
[0128]
请参照图19至图21,受试者使用外侧弓落地方式,左侧肘部在x,y,z三个方向位移的均方差分别11.26、5.20、8.36;右侧肘部三个方向位移的均方差分别10.65、4.97、8.20;左侧比右侧分别大了5.70%、4.62%、2.00%。因此,左侧需要加强稳定性练习。
[0129]
但是外侧弓落地方式与自主落地方式相比较:在y轴(冠状轴)上,外侧弓落地方式更加稳定。其中受试者的点杆框架模型请参照图22。
[0130]
因此,本实施例的案例表明受试者经过大约1.5小时的热身、测试和学习,改变了落地方式,基本掌握了外侧弓落地方式。在基本步态时空参数上:在155步/分钟节拍器的引导下,外侧弓落地方式比自主落地方式的步长减少了3厘米,步频增大了2步/分钟,外侧弓落地方式:左侧最大力值由1719.9n减小到1574.5n,减小了8.45%;左侧最大力值有1679.9n减小到1578.4n,减小了6.04%;左右侧的差异值由40n减小到3.9n。改变落地模式后,垂直地面反弹力的分布优于美国的7名短跑运动员。
[0131]
由此可见,运动机能与运动技能对诊断跑的技术至关重要,缺一不可。而本实施例无需同步即可实现运动捕捉系统和压力测试系统相联合的基准测试。
[0132]
实施例三
[0133]
请参照图2,一种直道途中跑躯干的评价终端,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例一或实施例二中的一种直道途中跑躯干的评价方法的各个步骤。
[0134]
综上所述,本发明提供的一种直道途中跑躯干的评价方法及终端,将受试者的躯干与头部两侧、躯干与四肢相连的部位和脊柱尾骨进行标识,便于对躯干运动进行简化;基于受试者的标识对直道途中跑的受试者进行运动捕捉和压力测试,其中,将脊柱尾骨的标识的运动轨迹和运动捕捉到的人体质心运动轨迹进行匹配,对压力测试的延迟数据进行校正,能够解决现有技术中压力测试数据延迟的问题。通过运动捕捉和压力测试所采集的数据,建立受试者对应的本体坐标的虚拟转动点,对虚拟转动点的位置坐标进行变换,并计算变换后的虚拟转动点坐标的均方差,均方差越小稳定性越高,从而能够快速得到躯干稳定性的评价结果。
[0135]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。