技术特征:
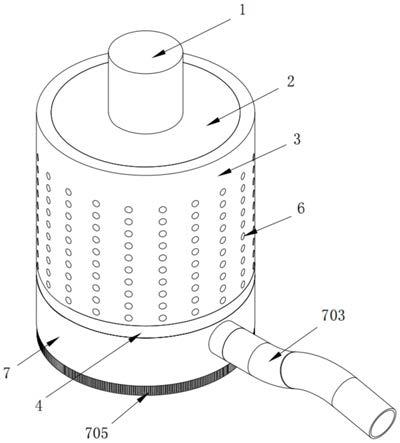
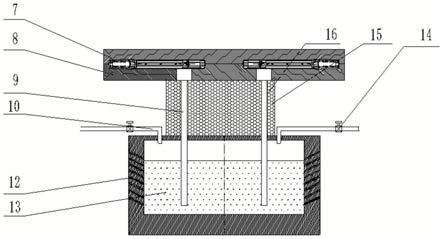
1.一种汽车发动机盖打磨机器人用打磨头,包括连接柱(1),其特征在于:所述连接柱(1)的表面固定连接有连接密封盘(2),所述连接密封盘(2)的表面固定连接有安装管(3),所述安装管(3)的一端固定连接有安装盘(4),所述安装盘(4)的表面固定安装有打磨驱动电机(5),所述打磨驱动电机(5)的输出轴贯穿并延伸至安装盘(4)的下表面;所述打磨驱动电机(5)的表面与安装管(3)的内壁套接,所述安装管(3)的表面固定开设有散热孔(6),多个所述散热孔(6)在安装管(3)的表面均匀分布,所述散热孔(6)的内壁与安装管(3)的内壁固定连通;所述安装盘(4)的下表面固定连接有集尘清洁机构,所述集尘清洁机构包括集尘管(7),所述集尘管(7)的表面与安装盘(4)的表面固定连接;所述集尘管(7)的内壁设置有打磨快换机构,所述打磨头快换机构包括功能管(8),所述功能管(8)的表面与集尘管(7)的内壁套接。2.根据权利要求1所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述集尘管(7)的内壁固定连接有固定盘(701),所述固定盘(701)的表面与集尘管(7)的内壁设置有集尘室(702),所述集尘室(702)的内壁固定连通有吸尘管(703),所述吸尘管(703)的一端贯穿并延伸至集尘管(7)的表面。3.根据权利要求2所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述固定盘(701)的表面固定开设有吸尘槽(704),多个所述吸尘槽(704)在固定盘(701)的表面均匀分布,所述吸尘槽(704)的内壁与集尘室(702)的内壁固定连通。4.根据权利要求3所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述集尘管(7)的下表面固定连接有集尘刷毛(705),多个所述集尘刷毛(705)在集尘管(7)的下表面均匀分布。5.根据权利要求2所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述功能管(8)的表面通过轴承与固定盘(701)的表面固定转动连接,所述功能管(8)的一端通过联轴器与打磨驱动电机(5)的输出轴固定连接。6.根据权利要求5所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述功能管(8)的表面固定套接有导电滑环(801),所述功能管(8)的内壁固定安装有驱动马达(802),所述驱动马达(802)通过电线与导电滑环(801)电性连接。7.根据权利要求6所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述驱动马达(802)的输出轴通过联轴器固定连接有驱动螺杆(803),所述驱动螺杆(803)的表面螺纹连接有螺纹管(804);所述功能管(8)的内壁固定开设有止动行程槽(805),两个所述止动行程槽(805)以功能管(8)的轴线为中心呈对称分布,所述止动行程槽(805)的内壁滑动连接有止动块(806);所述止动块(806)的表面与螺纹管(804)的表面固定连接,所述螺纹管(804)的一端固定连接有挤压盘(807),所述挤压盘(807)的表面与功能管(8)的内壁滑动连接。8.根据权利要求7所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述功能管(8)的一端固定连接有承重密封盘(808),所述功能管(8)的表面固定开设有避让槽(809),多个所述避让槽(809)以功能管(8)的轴心为中心呈环形阵列分布;所述避让槽(809)的内壁滑动连接有定位固定珠(810),所述定位固定珠(810)的表面滑动插接有挤压球(811),所述挤压球(811)的表面与挤压盘(807)的表面插接。
9.根据权利要求8所述的一种汽车发动机盖打磨机器人用打磨头,其特征在于:所述功能管(8)的表面滑动套接有连接管(812),所述连接管(812)的内壁固定开设有定位槽(813),多个所述定位槽(813)分别与多个所述定位固定珠(810)相对应;所述定位槽(813)的内壁呈圆弧形状,所述定位固定珠(810)的表面与定位槽(813)的内壁插接;所述连接管(812)的一端固定连接有打磨轮(814),所述打磨轮(814)的表面固定开设有十字通槽(815)。10.根据权利要求1-9任一项所述的一种汽车发动机盖打磨机器人用打磨头的使用方法,其特征在于,包括以下步骤:步骤一、在对汽车发动机盖进行打磨时,首先将打磨头通过连接柱1与工业机器人连接,并将打磨头上的吸尘管(703)与吸尘器连接,将需要打磨抛光的发动机盖移动到工业机器人工位处后,进行定位固定,通过工业机器人带动打磨头运动,对发动机盖进行打磨抛光;步骤二、在打磨时,打磨驱动电机(5)的输出轴通过联轴器带动功能管(8)转动,功能管(8)带动连接管(812)和打磨轮(814)转动,通过打磨轮(814)对发动机盖进行打磨,并通过工业机器人带动打磨轮(814)运动打磨,同时,打磨过程中产生的金属粉尘通过吸尘器和吸尘管(703)产生的吸力,进入集尘室(702)内后被吸尘器吸附收集;步骤三、在对发动机盖不同部位打磨或打磨后抛光,需要更换打磨轮(814)或抛光轮时,只需要控制驱动马达(802)反转,驱动马达(802)的输出轴通过联轴器带动驱动螺杆(803)反转,带动螺纹管(804)在功能管(8)内向上运动,功能管(8)带动挤压盘(807)向上运动,挤压盘(807)向上运动与挤压球(811)分离后,挤压球(811)对定位固定珠(810)的挤压力减小,然后将打磨轮(814)连同连接管(812)从功能管(8)的一端取下,然后更换其它打磨轮(814)或者抛光轮,并将其它打磨轮(814)或抛光轮上的连接管(812)与功能管(8)的表面插接,然后驱动马达(802)正转,驱动马达(802)的输出轴通过联轴器带动驱动螺杆(803)正转,带动螺纹管(804)运动,螺纹管(804)向下运动,带动挤压盘(807)向下运动,挤压盘(807)向下运动挤压挤压球(811),挤压球(811)向下运动挤压定位固定珠(810),定位固定珠(810)从功能管(8)内通过避让槽(809)运动出,并与连接管(812)内的定位槽(813)的内壁插接,在定位固定珠(810)的表面与定位槽(813)的内壁插接后,完成更换安装,然后工业机器人再次带动打磨头对发动机盖进行打磨或抛光。
技术总结
本发明属于汽车发动机盖打磨技术领域,尤其是一种汽车发动机盖打磨机器人用打磨头及其使用方法,包括连接柱,所述连接柱的表面固定连接有连接密封盘,所述连接密封盘的表面固定连接有安装管。该汽车发动机盖打磨机器人用打磨头及其使用方法,通过设置集尘清洁机构和打磨快换机构,在使用时,通过集尘管内设置集尘室和吸尘管,在打磨时产生的金属粉尘通过集尘室和吸尘管被吸尘器吸附,并通过驱动马达带动螺纹管运动,带动挤压盘运动,通过定位固定珠和定位槽配合,实现对打磨轮进行快速更换,从而解决了现有的打磨方式存在需要复杂控制程序系统对工业机器人进行控制,并在打磨抛光过程中会产生较多的金属粉尘,造成空气污染的问题。问题。问题。
技术研发人员:孙文成 谢灿 刘小瑞 田力羽
受保护的技术使用者:重庆电子工程职业学院
技术研发日:2022.01.21
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。