npc三电平虚拟同步机桥臂故障容错模型预测控制方法
技术领域
1.本发明涉及电力电子技术领域,特别是指一种npc三电平虚拟同步机桥臂故障容错模型预测控制方法。
背景技术:
2.风电、光伏发电通过电力电子变换器接入电网,但其随机性与波动性对电网的稳定运行带来了挑战。虚拟同步机(virtual synchronous generator,vsg)技术克服了新能源发电的低惯量、无阻尼的缺点,提高了电网对新能源的消纳能力,促进了“双碳”政策的贯彻落实。然而vsg在能量转换和传输中的可靠性直接影响电网稳定运行,因此vsg桥臂故障容错技术研究受到越来越多专家学者关注。
3.beck教授根据同步发电机特性提出虚拟同步机(virtual synchronous generator,vsg)技术,根据预设功率和电网参数为并网系统提供控制参考变量,加强电网扰动应对能力,使并网系统有自我恢复能力。文献[阳建,刘勇,盘宏斌,等.基于虚拟同步机的微网逆变器无频差控制[j].电网技术,2016,40(07):2001-2008.]基于vsg算法提出一种无频差的有功-频率控制算法,用频率比例积分反馈代替传统阻尼环节消除了孤网模式下的频率偏移。针对不平衡电网,文献[万晓凤,胡海林,聂晓艺,等.电网电压不平衡时的改进虚拟同步机控制策略[j].电网技术,2017,41(11):3573-3581.]和文献[孙军,蒋天龙,王仰铭,等.不平衡电网下双馈感应发电机的虚拟同步机控制优化策略[j].电力系统自动化,2020,44(10):135-144.]提出改进型vsg 控制策略,利用平衡电流vsg控制得到基准正序电流指令和正、负序电流指令合成最终调制电压信号,实现了输出电流三相平衡;文献[王仰铭,孙丹,年珩,等.不平衡电网下自同步虚拟同步机拓展功率控制策略研究[j].电网技术,2020,44(09):3368-3375.]分析拓展功率理论与 vsg结合的可行性,提出一种基于拓展功率的自同步vsg控制策略,实现不平衡电网下vsg 精准自同步并网。然而以上vsg控制方法需要pwm波调制和pi控制,参数设计相对复杂。
[0004]
模型预测控制(model predictive control,mpc)因鲁棒性强,控制简单、无需pwm调制等优势被应用于非线性控制领域。文献[张贞艳.弱电网情况下基于改进型有限集模型预测控制新型三相三电平整流器的研究[j].电源学报,2021,19(01):59-68.]针对常规mpc计算量大等问题,提出改进型有限集模型预测控制方法,实现电网电流快速跟踪。文献[陈来军,王任,郑天文,等.改善独立微网频率动态特性的虚拟同步发电机模型预测控制[j].电力系统自动化,2018,42(03):40-47.]提出基于mpc的vsg控制方法,根据系统频率和vsg输出量计算预测模型功率增量,改变vsg设定功率,减小新能源出力波动引发的系统频率震荡。文献 [李琰琰,赵亚谦,郭磊磊,等.虚拟同步发电机电流模型预测控制策略[j/ol].电源学报: 1-13.]结合mpc和vsg,提出一种vsg并网模型预测控制方法,由vsg和电流预测模型生成参考电流、预测电流,既为电网提供惯性和阻尼,也提供有功和无功功率支撑。然而以上方法未考虑变换器开关器件运行中可能会出现故障的问题,缺少容错设计,在vsg出现故障后并网控制策略失效,影响并网系统正常运行。
技术实现要素:
[0005]
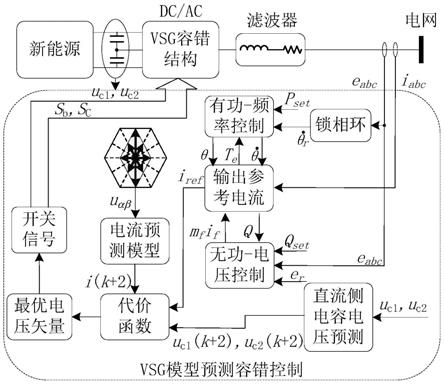
针对中点钳位(neutral point clamped,npc)型三电平vsg桥臂故障后控制策略失效的技术问题,本发明提出一种npc三电平虚拟同步机桥臂故障容错模型预测控制方法,在 vsg出现开关器件故障后,将常规npc三电平重构为vsg容错结构;通过vsg容错结构模拟同步机特性,根据系统预设功率调节并网参考电流;利用电流预测模型预测下一时刻电流,挑选最优电压矢量,并采用超前预测减小系统延时;考虑vsg容错结构存在直流侧电容电压不平衡问题,在代价函数中加入直流侧电容电压预测项均衡电容电压,提高了npc三电平vsg容错能力和可靠性。
[0006]
本发明的技术方案是这样实现的:
[0007]
一种npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其步骤如下:
[0008]
步骤一:分析npc三电平vsg单相桥臂发生故障时的运行机理,将npc三电平vsg 结构重构为vsg桥臂故障容错结构;
[0009]
步骤二:建立npc三电平vsg单相桥臂发生故障情况下的预测电流模型,并构建vsg 桥臂故障容错结构的电压矢量;
[0010]
步骤三:利用传感器采集k时刻直流侧电容电压,并根据k时刻直流侧电容电压预测模型k 2时刻直流电容电压差;
[0011]
步骤四:根据预测电流模型和k 2时刻直流电容电压差构建具有延时补偿功能的代价函数,并挑选代价函数的最小值对应的电压矢量作为最优电压矢量作用于k 1时刻,实现vsg 桥臂故障容错运行。
[0012]
优选地,所述npc三电平vsg单相桥臂发生故障时的运行机理为:当npc三电平并网变换器桥臂故障时,快速熔断器f
n1
和f
n2
熔断故障桥臂,导通对应双向晶闸管t
rn
,将故障相通过滤波电感连接到直流侧电容中点,进而将npc三电平vsg结构重构为vsg桥臂故障容错结构;其中,n=a,b,c。
[0013]
优选地,所述vsg桥臂故障容错结构的功能包括有功-调频、无功-调压、输出参考电流三类功能模块;调节机械转矩tm和电磁转矩te实现有功-调频;给定无功功率q
set
、电网无功功率q和电压差值构成无功-调压;根据vsg虚拟电势和端电压差值产生输出参考电流;表达式如下:
[0014][0015]
式中,j表示vsg转动惯量;表示vsg角频率;表示vsg角加速度;d
p
表示电压下垂系数;p
set
表示给定有功功率;mf表示励磁绕组和三相定子线圈之间最大互感;θ表示 vsg转动角度;if表示转子励磁电流,i表示三相电流,i
αβ_ref
表示参考电流,u
abc
表示三相电压,r表示滤波电感寄生电阻,ω表示角频率,l表示滤波电感,j表示虚部符号。
[0016]
优选地,所述预测电流模型的构建方法为:
[0017]
由npc三电平vsg结构可知npc三电平并网变换器电压方程:
[0018][0019]
式中,u
αβ
=[u
α
,u
β
]
t
,u
α
和u
β
表示变换器在αβ坐标系下输出电压;i
αβ
=[i
α
,i
β
]
t
,i
α
和i
β
表示变换器输出电流;e
αβ
=[e
α
,e
β
]
t
,ea和e
β
表示电网电压;r表示滤波电感寄生电阻,l表示滤波电感;
[0020]
将npc三电平并网变换器电压方程进行欧拉离散,可得:
[0021][0022]
式中,t表示采样周期;x(k)表示变量x在k时刻的值;x(k 1)表示变量x在(k 1)时刻的值;
[0023]
对离散后得表达式进行化简,得到k 1时刻预测电流:
[0024][0025]
优选地,所述vsg桥臂故障容错结构的电压矢量得构建方法为:vsg桥臂故障容错结构有八个开关器件,故障相接到直流侧电容中点为“0”状态,其他相各有三种状态,共计9 种开关状态;定义vsg开关状态为si,表达式如下:
[0026][0027]
当vsg发生桥臂故障后,电压分量u
αβ
表示为:
[0028][0029]
a相桥臂故障对应得vsg桥臂故障容错结构电压矢量如表1所示:
[0030]
表1a相桥臂故障时vsg桥臂故障容错结构电压矢量
[0031][0032]
优选地,所述k 2时刻直流电容电压差的获得方法为:
[0033]
预测k 1时刻直流电容电压差:
[0034][0035]
其中,u
c1
(k 1)表示k 1时刻直流侧上电容电压,u
c2
(k 1)表示k 1时刻直流侧上电容电压,u
c1
(k)表示k 1时刻直流侧上电容电压,u
c2
(k)表示k 1时刻直流侧上电容电压,c表电容;
[0036]
由k 1时刻直流电容电压差可求得k 2时刻直流电容电压差。
[0037]
优选地,所述具有延时补偿功能的代价函数的构建方法为:
[0038]
根据预测电流模型可得k 1时刻预测电流,并利用k 1时刻预测电流、参考电流和k 1 时刻直流电容电压差构建代价函数,表示为:
[0039]
g=|i
αref-i
α
(k 1)| |i
βref-i
β
(k 1)| λ|u
c1
(k 1)-u
c2
(k 1)|;
[0040]
式中,i
αref
表示虚拟同步机输出参考电流的α轴分量,i
βref
表示虚拟同步机输出参考电流的β轴分量,i
α
(k 1)表示k 1时刻预测电流的α轴分量,i
β
(k 1)表示k 1时刻预测电流的β轴分量,λ表示电压均衡权重系数;
[0041]
根据预测的k 1时刻的电流可进一步预测得到k 2时刻的最优电压矢量,根据最优电压矢量获得k 2时刻的预测电流;因此,根据代价函数的表达式以及k 2时刻的预测电流可构建具有延时补偿功能的代价函数:
[0042]
g'=|i
αref-i
α
(k 2)| |i
βref-i
β
(k 2)| λ|u
c1
(k 2)-u
c2
(k 2)|;
[0043]
其中,i
α
(k 2)表示k 2时刻预测电流的α轴分量,i
β
(k 2)表示k 2时刻预测电流的β轴分量,u
c1
(k 2)表示k 2时刻直流侧上电容电压,u
c2
(k 2)表示k 2时刻直流侧上电容电压。
[0044]
与现有技术相比,本发明产生的有益效果为:
[0045]
1)分析npc三电平vsg单相桥臂故障后运行机理,在开关器件故障后利用直流侧电容组成虚拟桥臂,重构为vsg桥臂故障容错结构。
[0046]
2)建立故障情况下预测电流模型,重构故障状态空间电压矢量,将直流侧中点电容电压引入容错模型代价函数,减小电容电压波动,实现vsg桥臂故障容错运行。
[0047]
3)在开关器件发生故障后,npc三电平vsg能容错连续运行,通过实验验证了所提模型预测容错控制策略有效性,提高了vsg运行可靠性。
附图说明
[0048]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0049]
图1为npc三电平vsg结构图。
[0050]
图2为vsg桥臂故障容错结构图。
[0051]
图3为vsg容错结构空间电压矢量分布图。
[0052]
图4为vsg桥臂故障容错模型预测电流控制结构图。
[0053]
图5为npc三电平vsg容错结构硬件在环半实物实验平台。
[0054]
图6为a相故障后无中点电压均衡的vsg频率变化波形图;(a)电压变化,(b)频率变
化。
[0055]
图7为a相故障后带中点电压均衡动态波形图;(a)电压变化,(b)频率变化。
[0056]
图8为a相故障后svpwm控制和mpc控制对比图;(a)电压变化,(b)频率变化。
[0057]
图9为频率从50hz下降到49.95hz时功率和电流波形。
[0058]
图10为频率从49.95hz上升到50hz时功率与电流波形。
[0059]
图11为频率从50hz上升到50.05hz时功率与电流波形。
[0060]
图12为频率从50.05hz下降到50hz时功率和电流波形。
[0061]
图13为电压从110v下降到104.5v时功率与电流波形。
[0062]
图14为电压从104.5v下降到110v时功率和电流波形。
[0063]
图15为电压从110v上升到115.5v时功率与电流波形。
[0064]
图16为电压从115.5v下降到110v时功率和电流波形。
[0065]
图17为电压110v,频率50hz时电流和功率波形。
具体实施方式
[0066]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0067]
本发明实施例提供了一种npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其步骤如下:
[0068]
步骤一:分析npc三电平vsg单相桥臂发生故障时的运行机理,将npc三电平vsg 结构重构为vsg桥臂故障容错结构;npc三电平vsg结构如图1,其中开关器件可能因为尖峰电压和过电流等原因损坏,进而降低vsg可靠性,影响电网安全稳定运行。当npc三电平并网变换器桥臂(如a相桥臂)故障时,快速熔断器f
n1
和f
n2
熔断故障桥臂,导通对应双向晶闸管t
rn
,将故障相通过滤波电感连接到直流侧电容中点,进而将npc三电平vsg 结构重构为vsg桥臂故障容错结构,如图2;其中,n=a,b,c。
[0069]
vsg桥臂故障容错结构的功能包括有功-调频、无功-调压、输出参考电流三类功能模块;调节机械转矩tm和电磁转矩te实现有功-调频;给定无功功率q
set
、电网无功功率q和电压差值(vsg虚拟电势和端电压差值)构成无功-调压;根据vsg虚拟电势和端电压差值产生输出参考电流;表达式如式(1):
[0070][0071]
式中,j表示vsg转动惯量;表示vsg角频率;表示vsg角加速度;d
p
表示电压下垂系数;p
set
表示给定有功功率;mf表示励磁绕组和三相定子线圈之间最大互感;θ表示 vsg转动角度;if表示转子励磁电流,i表示三相电流,i
αβ_ref
表示参考电流,u
abc
表示三相电压,r表示滤波电感寄生电阻,ω表示角频率,l表示滤波电感,j表示虚部符号。
[0072]
步骤二:建立npc三电平vsg单相桥臂发生故障情况下的预测电流模型,并构建vsg 桥臂故障容错结构的电压矢量;
[0073]
由图1可知npc三电平并网变换器电压方程,如式(2):
[0074][0075]
式中,u
αβ
=[u
α
,u
β
]
t
,u
α
和u
β
表示变换器在αβ坐标系下输出电压;i
αβ
=[i
α
,i
β
]
t
,i
α
和i
β
表示变换器输出电流;e
aβ
=[e
α
,e
β
]
t
,e
α
和e
β
表示电网电压;r表示滤波电感寄生电阻,l表示滤波电感。
[0076]
将npc三电平并网变换器电压方程进行欧拉离散,可得:
[0077][0078]
式中,t表示采样周期;x(k)表示变量x在k时刻的值;x(k 1)表示变量x在(k 1)时刻的值;
[0079]
对离散后得表达式进行化简,得到k 1时刻预测电流:
[0080][0081]
图2中,vsg桥臂故障容错结构有八个开关器件,故障相接到直流侧电容中点为“0”状态,其他相各有三种状态,共计9种开关状态,如图3;定义vsg开关状态为si,表达式如下:
[0082][0083]
当vsg发生桥臂故障后,电压分量u
αβ
表示为:
[0084][0085]
以a相桥臂故障为例,vsg桥臂故障容错结构电压矢量如表1所示:
[0086]
表1a相桥臂故障时vsg桥臂故障容错结构电压矢量
[0087]
expert4构成,控制算法在dsp和fpga控制芯片组成的pe-expert4处理器板上执行,实验参数如表2。
[0104]
表2仿真和实验参数
[0105][0106]
1)中点电压平衡能力和对比
[0107]
为验证引入该中点电压均衡项后的中点电压平衡能力,a相桥臂故障后不带中点电压平衡和带中点电压平衡的控制效果对比如图6和图7。图6(a)为a相桥臂故障后不带中点电压平衡vsg电压波动时的功率和电压波动情况:2.5s之前电网电压为110v且带有中点电压均衡能力,系统工作稳定,直流侧中点电压相对平衡,电压波动约为5v;在3-4s撤除中点电压均衡项,电网电压下降为104.5v,无功功率上升,电网电流增加,直流侧电容电压波动急剧增加,不可控制;在4-5s,电网电压恢复到110v,无功功率和电网电流恢复到原始数值,直流侧电容电压波动彻底失去控制。
[0108]
图6(b)为a相桥臂故障后不带中点电压平衡vsg频率波动时的功率和电压波动情况: 2.5s之前并网频率为50hz,系统工作稳定,带有中点电压均衡,直流侧中点电压相对平衡,电压波动约为5v;在3-4s,电网频率下降为45.95hz,有功功率上升,电网电流增加,此时直流侧电容电压波动迅速增加不可控制;在4-5s,电网频率恢复到50hz,有功功率和电网电流恢复到原始数值,直流侧电容电压波动失去控制。
[0109]
图7(a)为a相桥臂故障后带中点电压平衡vsg电压波动时的功率和电压波动情况: 2.5s之前电网电压为110v,系统工作稳定,直流侧中点电压相对平衡,电压波动约为5v;在3-4s,电网电压下降为104.5v,无功功率上升,电网电流增加,此时直流侧电容电压波动先增加到10v再以一定系数稳定到5v;在4-5s,电网电压恢复到110v,无功功率和电网电流恢复到原始数值,直流侧电容电压波动先增加到10v再稳定到5v。
[0110]
图7(b)为a相桥臂故障后带中点电压平衡vsg频率波动时的功率和电压波动情况: 2.5s之前并网频率为50hz,系统工作稳定,直流侧中点电压相对平衡,电压波动约为5v;在3-4s,电网频率下降为45.95hz,有功功率上升,电网电流增加,此时直流侧电容电压波动增加,约为10v;在4-5s,电网频率恢复到50hz,有功功率和电网电流恢复到原始数值,直流侧电容电压波动缩减为8v。由两组对比可知,直流侧中点电压均衡项可以有效抑制电动电压波动。
[0111]
2)动态响应速度对比
[0112]
a相桥臂故障后使用mpc和svpwm控制策略的效果对比如图8。图8(a)为vsg在电压波动时的响应,2.5s之前电网电压为110v,系统工作稳定,直流侧中点电压相对平衡,电压波动约为5v;在3-4s,电网电压下降为104.5v,svpwm控制下无功功率上升到峰值约 0.43s,mpc控制用时0.28s;电网电流增加,此时直流侧电容电压波动先增加到10v再稳定到5v;在4-5s,电网电压恢复到110v,svpwm控制下无功功率恢复到原值约用了0.39s, mpc控制用时0.25s;直流侧电容电压波动先增加到10v再稳定到5v。
[0113]
图8(b)为vsg在频率波动时的响应,2.5s之前并网频率为50hz,系统工作稳定,直流侧中点电压相对平衡,电压波动约为5v;在3-4s,电网频率降为45.95hz,svpwm控制下有
功功率上升到峰值约0.78s,和mpc控制用时相同;在4-5s,电网频率恢复到50hz,有功功率变化趋势也极为相似,直流侧电容电压波动缩减为8v。结果表明mpc相较于svpwm 在“无功-电压”功能上响应速度快,在“有功-频率”功能上响应速度相当。
[0114]
3)有功-频率调节能力验证
[0115]
给定电网初始频率f=50hz,有功功率p=1000w,无功功率q=0var。如图9,功率稳定时频率f从50hz下降至49.95hz,有功功率p从1000w上升至1400w再稳定到1200w,无功功率q在0var附近波动,三相电流从4.9a上升然后稳定在6a,直流侧电容电压差约为5v,且波动幅值相对稳定,无增大趋势,因为中点电压平衡项使最优电压矢量选择产生低中点电流的电压矢量。功率稳定时频率f从49.95hz上升至50hz,如图10,有功功率p从 1200w下降至1000w,无功功率q先上升至100var再稳定到0var附近,并网电流从6a 下降至4.9a,直流侧电容电压差约4v,略有减小。当电网频率低于额定频率时,通过有功
‑ꢀ
频率特性计算调节功率,同时与给定功率和输出有功功率的差值共同生成参考电流的频率,最后根据生成的参考电流用mpc选择最优电压矢量输出更多的有功功率,达到新的平衡。实验结果表明当频率下降时所提vsg容错控制策略能实现有功-频率调节,npc三电平并网变换器vsg有自我恢复能力。
[0116]
如图11,功率稳定时频率f从50hz上升至50.05hz,有功功率p从1000w下降至500 w再稳定到700w附近,无功功率q在0var附近,三相电流从4.9a先下降然后稳定在3.6 a附近,直流侧电容电压差约为4v,相较稳定时略有减小;功率稳定时频率f从50.05hz下降至50hz,如图12,有功功率p从700w先上升再稳定至1000w附近,无功功率q先下降再稳定到0var附近,并网电流从3.6a上升至4.9a,直流侧电容电压差约为5v,相较稳定时略有增加。当电网频率高于额定频率时,通过有功-频率特性计算调节功率,同时与给定功率和输出无功功率的差值共同生成参考电流的幅值,最后根据生成的参考电流用mpc选择最优电压矢量减少有功功率输出。实验结果表明当频率上升时所提vsg容错控制策略能实现有功-频率调节,进一步证明了该策略的有效性。
[0117]
4)无功-电压调节能力验证
[0118]
给定电网初始电网电压e=110v,功率稳定时电网电压从110v下降到104.5v,如图13,无功功率q由600var上升到800var再稳定到700var附近,有功功率p先下降再稳定至800w附近,并网电流从4.9a上升至5.8a附近。如图14,功率稳定时电网电压从104.5v上升到110v,无功功率q由700var逐步稳定到600var,有功功率p 伴随着电网电压有所波动然后恢复原状态,三相电流从5.8a上升至4.9a。当电网电压低于额定电压时,通过无功-电压特性计算调节功率,再经过调节器和积分生成电流参考幅值,最后根据生成的参考电流用mpc选择最优电压矢量增大无功功率输出。实验结果表明当电网电压下降时,无功功率会上升;当电网电压由下降恢复到额定值时,无功功率也会恢复到额定值。
[0119]
功率稳定时电网电压从110v上升到115.5v,如图15,无功功率q由600var下降到300var再稳定到500var附近,有功功率p先下降再稳定至800w附近,并网电流从 4.9a上升至3.8a附近。如图16,功率稳定时电网电压从115.5v下降到110v,无功功率q由600var逐步稳定到800var。有功功率p伴随着电网电压有所波动然后恢复原状态,三相电流从3.8a上升至4.9a。当电网电压高于额定电压时,通过无功-电压特性计算调节功率,再经过调节器和积分生成电流参考幅值,减少无功功率输出。实验结果表明当电网电压上升时,无功功率会
适当下降以适应电网变化;当电网电压由上升恢复到额定值时,无功功率也会恢复到额定值,验证了所提vsg容错控制策略能自动调节无功功率
‑ꢀ
电压变化。
[0120]
当电网电压为110v,频率为50hz时,电网电流稳态波形如图17。在容错状态下,三相电网电流工作稳定,thd为3.6%,有功功率和无功功率均稳定,直流侧电容电压差值在1v附近波动,最大波动5v,为直流电压源的0.83%。
[0121]
vsg为新能源并网系统提供惯性和阻尼,然而vsg桥臂故障会导致常规并网控制策略失效,造成输出电流波形严重畸变,影响并网系统正常运行。为使vsg桥臂故障后容错连续运行,针对npc三电平vsg桥臂故障问题提出一种容错模型预测控制方法。
[0122]
a)在vsg出现开关器件故障后,所提控制策略将npc三电平vsg重构为vsg桥臂故障容错结构,建立vsg桥臂故障容错模型,分析vsg桥臂故障容错结构的电压矢量和工作原理。
[0123]
b)基于模型预测控制理论,提出一种npc三电平vsg桥臂故障容错模型预测控制策略,使vsg在桥臂故障后稳定运行。与常规svpwm控制策略相比,所提控制策略在有功—频率调节环节用时缩短,动态响应速度快。
[0124]
c)提出一种直流侧电容电压均衡策略,在代价函数中加入直流侧电容电压预测项。当 vsg发生桥臂故障并进行有功—频率和无功—电压调节时,常规控制策略下的直流侧电容电压不均衡,所提控制策略可以将直流侧电容电压波动稳定在10v以内。
[0125]
实验结果表明,所提控制策略能在vsg桥臂故障后进行有功—频率和无功—电压调节,抑制直流侧电容电压波动,有效提高vsg运行可靠性。
[0126]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。