技术特征:
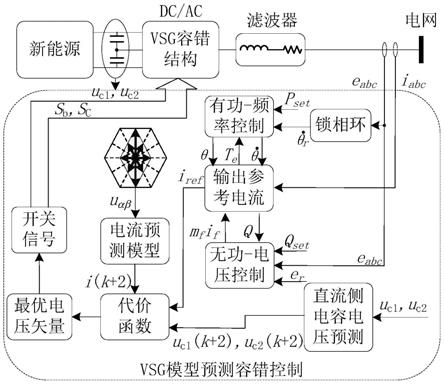
1.一种npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,其步骤如下:步骤一:分析npc三电平vsg单相桥臂发生故障时的运行机理,将npc三电平vsg结构重构为vsg桥臂故障容错结构;步骤二:建立npc三电平vsg单相桥臂发生故障情况下的预测电流模型,并构建vsg桥臂故障容错结构的电压矢量;步骤三:利用传感器采集k时刻直流侧电容电压,并根据k时刻直流侧电容电压预测模型k 2时刻直流电容电压差;步骤四:根据预测电流模型和k 2时刻直流电容电压差构建具有延时补偿功能的代价函数,并挑选代价函数的最小值对应的电压矢量作为最优电压矢量作用于k 1时刻,实现vsg桥臂故障容错运行。2.根据权利要求1所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述npc三电平vsg单相桥臂发生故障时的运行机理为:当npc三电平并网变换器桥臂故障时,快速熔断器f
n1
和f
n2
熔断故障桥臂,导通对应双向晶闸管t
rn
,将故障相通过滤波电感连接到直流侧电容中点,进而将npc三电平vsg结构重构为vsg桥臂故障容错结构;其中,n=a,b,c。3.根据权利要求1所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述vsg桥臂故障容错结构的功能包括有功-调频、无功-调压、输出参考电流三类功能模块;调节机械转矩t
m
和电磁转矩t
e
实现有功-调频;给定无功功率q
set
、电网无功功率q和电压差值构成无功-调压;根据vsg虚拟电势和端电压差值产生输出参考电流;表达式如下:式中,j表示vsg转动惯量;表示vsg角频率;表示vsg角加速度;d
p
表示电压下垂系数;p
set
表示给定有功功率;m
f
表示励磁绕组和三相定子线圈之间最大互感;θ表示vsg转动角度;i
f
表示转子励磁电流,i表示三相电流,i
αβ_ref
表示参考电流,u
abc
表示三相电压,r表示滤波电感寄生电阻,ω表示角频率,l表示滤波电感,j表示虚部符号。4.根据权利要求1所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述预测电流模型的构建方法为:由npc三电平vsg结构可知npc三电平并网变换器电压方程:式中,u
αβ
=[u
α
,u
β
]
t
,u
a
和u
β
表示变换器在αβ坐标系下输出电压;i
αβ
=[i
α
,i
β
]
t
,i
a
和i
β
表示变换器输出电流;e
αβ
=[e
a
,e
β
]
t
,e
α
和e
β
表示电网电压;r表示滤波电感寄生电阻,l表示滤波电感;
将npc三电平并网变换器电压方程进行欧拉离散,可得:式中,t表示采样周期;x(k)表示变量x在k时刻的值;x(k 1)表示变量x在(k 1)时刻的值;对离散后得表达式进行化简,得到k 1时刻预测电流:5.根据权利要求1或4所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述vsg桥臂故障容错结构的电压矢量得构建方法为:vsg桥臂故障容错结构有八个开关器件,故障相接到直流侧电容中点为“0”状态,其他相各有三种状态,共计9种开关状态;定义vsg开关状态为s
i
,表达式如下:当vsg发生桥臂故障后,电压分量u
αβ
表示为:a相桥臂故障对应得vsg桥臂故障容错结构电压矢量如表1所示:表1 a相桥臂故障时vsg桥臂故障容错结构电压矢量错结构电压矢量6.根据权利要求4所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述k 2时刻直流电容电压差的获得方法为:预测k 1时刻直流电容电压差:
其中,u
c1
(k 1)表示k 1时刻直流侧上电容电压,u
c2
(k 1)表示k 1时刻直流侧上电容电压,u
c1
(k)表示k 1时刻直流侧上电容电压,u
c2
(k)表示k 1时刻直流侧上电容电压,c表电容;由k 1时刻直流电容电压差可求得k 2时刻直流电容电压差。7.根据权利要求6所述的npc三电平虚拟同步机桥臂故障容错模型预测控制方法,其特征在于,所述具有延时补偿功能的代价函数的构建方法为:根据预测电流模型可得k 1时刻预测电流,并利用k 1时刻预测电流、参考电流和k 1时刻直流电容电压差构建代价函数,表示为:g=|i
αref-i
α
(k 1)| |i
βref-i
β
(k 1)| λ|u
c1
(k 1)-u
c2
(k 1)|;式中,i
αref
表示虚拟同步机输出参考电流的α轴分量,i
βref
表示虚拟同步机输出参考电流的β轴分量,i
α
(k 1)表示k 1时刻预测电流的α轴分量,i
β
(k 1)表示k 1时刻预测电流的β轴分量,λ表示电压均衡权重系数;根据预测的k 1时刻的电流可进一步预测得到k 2时刻的最优电压矢量,根据最优电压矢量获得k 2时刻的预测电流;因此,根据代价函数的表达式以及k 2时刻的预测电流可构建具有延时补偿功能的代价函数:g'=|i
αref-i
α
(k 2)| |i
βref-i
β
(k 2)| λ|u
c1
(k 2)-u
c2
(k 2)|;其中,i
α
(k 2)表示k 2时刻预测电流的α轴分量,i
β
(k 2)表示k 2时刻预测电流的β轴分量,u
c1
(k 2)表示k 2时刻直流侧上电容电压,u
c2
(k 2)表示k 2时刻直流侧上电容电压。
技术总结
本发明提出了一种NPC三电平虚拟同步机桥臂故障容错模型预测控制方法,用于解决NPC型三电平VSG桥臂故障后控制策略失效的技术问题;其步骤为:首先,将NPC三电平VSG结构重构为VSG桥臂故障容错结构,并建立故障情况下的预测电流模型以及VSG桥臂故障容错结构的电压矢量;其次,利用传感器采集当前时刻直流侧电容电压,并根据当前时刻直流侧电容电压预测模型下一时刻直流电容电压差;最后,构建具有延时补偿功能的代价函数,并挑选代价函数的最小值对应的电压矢量作为最优电压矢量作用于下一时刻,实现VSG桥臂故障容错运行。在开关器件发生故障后,NPC三电平VSG能容错连续运行,验证了本发明方法的有效性,提高了VSG运行可靠性。提高了VSG运行可靠性。提高了VSG运行可靠性。
技术研发人员:金楠 肖晗 谢欢 武洁 夏英巽 陈墨 樊武闯 代东任 侯智文 马梓阳 王锐
受保护的技术使用者:郑州轻工业大学
技术研发日:2022.01.27
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。