一种基于mpc的电池均衡控制方法及装置
技术领域
1.本发明涉及电池组均衡技术领域,尤其涉及一种基于mpc的电池均衡控制方法及装置。
背景技术:
2.新能源发电技术在目前电力行业中比重越来越高,磷酸铁锂电池作为主要动力电池,具有能量密度大、具有较长的使用寿命、耐高温以及无记忆特性等特点,在储能系统、电动汽车、直流系统后备电源等领域得到了广泛应用。实际应用中,锂电池组由一定数量的单体电池串/并联组合而成,由于电池生产过程、使用工况等条件不同,锂电池单体间必然会存差异,若不对这些差异进行控制,单体电池间的差异性将随着时间逐步扩大,最终将引起电池组整体故障,甚至引发燃烧、爆炸事故。因此,为了减小电池组“不一致性”对供电可靠性造成的影响,提高电池组工作效率,延长电池使用寿命,对电池组采用均衡策略加以控制是非常必要的。
3.目前的均衡方法中,根据均衡电路拓扑不同均衡方法主要分为以下几类:
4.1、变压器式均衡
5.变压器式均衡主要依靠电、磁场间能量转换,电流大、转换效率较高,但其均衡电路拓扑较为复杂,控制元件数量过多,经济性较低,也不适合在实际工程中应用。
6.2、感容式均衡
7.感容式均衡主要依靠含电容、电感的电路拓扑,利用电容、电感存储、释放能量,在电量不同的单体电池间实现均衡,但该类均衡方式的拓扑复杂、能量利用率较低,且价格偏高,同样不适合实际工程应用;
8.3、dc/dc变换式均衡
9.dc/dc变换式均衡是在均衡电路中加入高频变压器以将主次级隔开,通过磁链耦合的形式在单体电池间传递能量,与其他类型均衡技术相比,能量转移效率更高、能量转换速度更快,均衡过程可与充放电过程同时进行,且采用该方法时,串联电池数增加不会提高电路元件两端电压,适用于单体电池数目较多的场景,如变电站直流系统等。
10.dc/dc变换式均衡方法,虽然具有能量转移效率高、能量转换速度快等优点,但是现有技术中针对于dc/dc变换式均衡,通常是设置固定的阈值进行均衡,即均衡阈值是固定不变的,对各单体电池按照该固定的阈值进行控制,但是电池的状态是不断变化的,采用固定阈值的方式就无法适应不同状态下的电池均衡,造成大量不必要的单体电池间无效充放电,降低均衡电路的工作效率,因而实际的均衡控制效果并不佳。
技术实现要素:
11.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、控制效率高且安全可靠的基于mpc的电池均衡控制方法及装置,能够实现电池单体间均衡,减少电池单体间不一致性,同时减少单体电池间无效充放电次数,有效提
高均衡效率。
12.为解决上述技术问题,本发明提出的技术方案为:
13.一种基于mpc的电池均衡控制方法,步骤包括:
14.s1.构建电池单体的预测控制模型;
15.s2.实时获取单体电池的soc值以及电压值,基于mpc方法对所述预测控制模型进行模拟预测,求解出所述预测控制模型的最优均衡阈值以及均衡中心点,并预测得到各单体电池的实时转移电量;
16.s3.根据实时求解出的所述最优均衡阈值、所述均衡中心点以及预测的所述各单体电池的实时转移电量,对被控电池组进行均衡控制。
17.进一步的,所述步骤s1的步骤包括:
18.s101.构建单体电池的soc值与单体电池的电压值之间的耦合关系模型,并进行局部线性化,构建得到单体电池soc值与单体电压值之间的动态线性模型;
19.s102.根据所述动态线性模型的离散方程,得到所述电池单体的预测控制模型。
20.进一步的,所述步骤s102中,所述步骤s101中,构建的所述动态线性模型为:
21.yk=sxk22.其中i为编号值,qi为第i个soc值,ui为第i个电压值,n为soc值总数;s表示控制线性动态行为的矩阵,具体为:
[0023][0024]
其中,a、b分别为电压值离散系统输入、输出矩阵,c、d分别为soc值输入、输出矩阵;
[0025]
所述步骤s102中所述动态模型的离散方程为:
[0026][0027]
其中,qk为第k个单体电池的上一时刻单体电池电量,q
k 1
为k为电池编号,m为,am、bm为离散控制矩阵,ts为离散转置矩阵;
[0028]
得到所述电池单体的预测控制模型为:
[0029][0030]
其中,m表示电池组中单体电池数目。
[0031]
进一步的,所述步骤s3中,所述步骤s2中按照下式对所述预测控制模型进行最优均衡阈值的求解:
[0032][0033]
其中,qc为均衡中心点,δ(qc)为求解均衡中心点构建的函数,δ为区间长度,f是关于qi的函数,η为能量转换率,m为电量大于预设阈值的高电量单体电池数,r为电量小于预设阈值低电量单体电池数;
[0034]
将δ(qc)的最小值点所对应的阈值作为所述最优均衡阈值。
[0035]
进一步的,所述步骤s102中,所述步骤s2中使用一维探索方法求解所述均衡点中心,步骤包括:
[0036]
s201.输入单体电池初始soc值q,求解所述模拟预测模型中f和δ,计算单体电池soc值均值q
av
并作为起始点q
c0
;
[0037]
s202.按照求解步长取下一个节点q
c1
,即q
c1
=q
av
h,其中h为所述求解步长,根据确定的m和r计算得到qm和q
l
,qm和q
l
分别为对应高、低电量单体电池均衡中心点参考值;
[0038]
s203.比较qm和q
l
,若δqm《δq
l
,则返回步骤s202以继续求解;若δqm》δq
l
,则回到起始点q
c0
并向另一方向求解;
[0039]
s204.遍历完所有电池单体初始soc值q以后,筛选出δq的最小值δq
min
并作为所述均衡中心点。
[0040]
进一步的,所述步骤s102中,所述步骤s202中,按下式计算δq1和δq0:
[0041][0042][0043]
δq=|q
m-q
l
|
[0044]
其中,qm为高电量电池单体的均衡中心点,q
l
为低电量电池单体的均衡中心点,qi为第i个电池soc值,qc为均衡中心点,qj为第j个电池soc值,δ为区间长度,f是关于qi的函数。
[0045]
进一步的,所述步骤s2中mpc方法的具体控制步骤包括:
[0046]
s211.初始化后采集被测输入控制矢量,设定目标控制值x
set
;
[0047]
s212.将当前时刻采集到的输入控制矢量输入所述预测控制模型,预测得到当前时刻t对下一时刻的预测序列内的状态变量x
t 1
,即为模型预测值;
[0048]
s213.计算当前时刻与上一时刻的所述模型预测值之间的差值,得到预测误差δq;
[0049]
s214.以所述预测误差δq最小作为目标函数,对输入控制矢量进行n步预测控制,由每一次输出结果得到各单体电池的实时转移电量序列。
[0050]
进一步的,所述步骤s3包括:将实时求解得到的所述均衡中心点与单体电池soc值进行比较,对差值在预设区间内的电池组进行均衡控制,根据求解得到的所述最优均衡阈值以及预测的所述各单体电池的实时转移电量控制单体电池间转移电量数。
[0051]
进一步的,构建电量转移矩阵,所述电量转移矩阵中元素为均衡过程第i个电池单体向第j个电池单体转移x单位电量x
ij
,其中所述第i个电池单体的soc值高于所述第j个电池单体,使用所述电量转移矩阵的稀疏度s(t)表示所述单体电池间转移电量数,使用各单体电池的实时转移电量求解所述转移矩阵的稀疏度s(t)的最小值,以控制按照求解的最小值实现所述均衡控制。
[0052]
一种基于mpc的电池均衡控制装置,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
[0053]
与现有技术相比,本发明的优点在于:
[0054]
1、本发明通过构建电池单体的预测控制模型,实时依据单体电池的soc值以及电压值,基于mpc方法对预测控制模型进行模拟预测,即对均衡阈值进行实时模拟预测,可以求解出动态模拟阈值,实现对电池单体间的实时动态均衡控制,可以减少单体电池间无效充放电次数,提高均衡电路工作效率,同时有效减少电池单体间“不一致性”,提高电池组供电安全、可靠性。
[0055]
2、本发明进一步通过采用一维探索法求解均衡中心点,并在求解过程中加入是否向前求解判据,相比需要对每一个soc值轮流判定的传统均衡策略,可以进一步提高均衡效率,有效降低均衡时长。
附图说明
[0056]
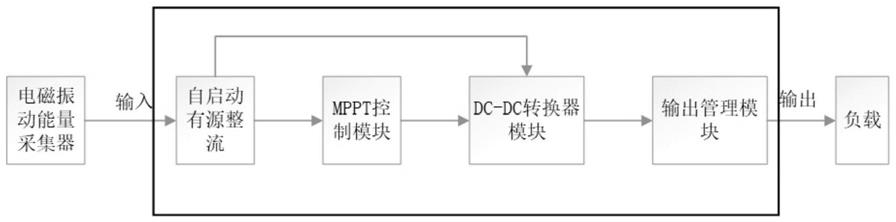
图1是本实施例采用的均衡电路结构示意图。
[0057]
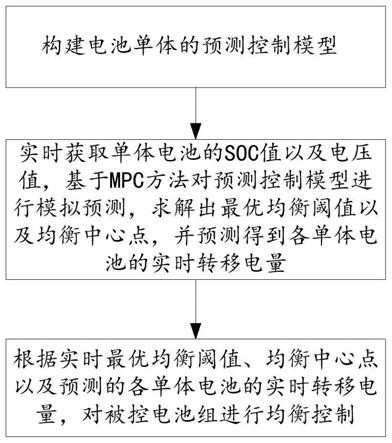
图2是本实施例基于mpc的电池均衡控制方法的实现流程示意图。
[0058]
图3是本实施例中采用一维探索法求解均衡中心点的流程示意图。
[0059]
图4是本实施例中采用mpc方法实现控制的具体实现流程示意图。
具体实施方式
[0060]
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
[0061]
本实施例是基于dc/dc变换式均衡实现电池均衡控制,所使用的均衡电路如图1所示,其中lt1~ltn为高频变压器,通过在均衡电路中加入高频变压器以将主次级隔开,通过变压器磁链耦合的形式在单体电池间传递能量,可有效减少能量损耗,且基于该电路结构,可以增加串联电池数量的同时,不会增加开关电器上承受电压,可以适用于串联电池组数目较多的场合。通过对上述均衡电路进行控制,即可实现电池组内单体电池间的均衡控制。
[0062]
如图2所示,本实施例基于mpc的电池均衡控制方法的步骤包括:
[0063]
s1.构建电池单体的预测控制模型;
[0064]
s2.实时获取单体电池的soc值以及电压值,基于mpc(model predictive control,模型预测控制)方法对预测控制模型进行模拟预测,求解出预测控制模型的最优均衡阈值以及均衡中心点qc,,并预测得到各单体电池的实时转移电量,上述均衡阈值即为以均衡中心点为中心,按固定范围或比例设定确定的电池电量阈值,均衡中心点为均衡求解过程中的起始点;
[0065]
s3.根据实时求解出的最优均衡阈值、均衡中心点以及预测的各单体电池的实时转移电量,对被控电池组进行均衡控制。
[0066]
本实施例通过先构建电池单体的预测控制模型,实时依据单体电池的soc值以及电压值,基于mpc方法对预测控制模型进行模拟预测,即对均衡阈值进行实时模拟预测,可以求解出动态模拟阈值,实现对电池单体间的实时动态均衡控制,可以减少单体电池间无效充放电次数,提高均衡电路工作效率,同时有效减少电池单体间“不一致性”,提高电池组供电安全、可靠性。
[0067]
为优化电量转移方向及转移电量数,需先建立对应数学模型,以求解均衡中心点qc,以及均衡阈值,均衡阈值具体设置为:qc±
[(1 f)δ],其中f是关于qi的函数,可结合电池
工作特性整定,δ值为区间长度,可根据均衡精度设置。
[0068]
本实施例中步骤s1构建电池单体的预测控制模型的具体步骤包括:
[0069]
s101.构建单体电池的soc(电池荷电状态)值与单体电池的电压值之间的耦合关系模型,并进行局部线性化,构建得到单体电池soc值与单体电压值之间的动态线性模型;
[0070]
s102.根据动态线性模型的离散方程,得到电池单体的预测控制模型。
[0071]
由于电池组充电过程是一个动态非线性过程,电池soc值与单体电压之间的关系难以清晰地表达,本实施例采用优化算法对电池soc值与单体电压之间的耦合关系进行局部线性化:
[0072]
[x=x1x2…
xn],[y=y1y2…yn
]
ꢀꢀꢀ
(1)
[0073][0074]
其中i为编号值,qi为第i个soc值,ui为第i个电压值,n为soc值总数;
[0075]
则动态线性模型可表示为:
[0076]
yk=sxkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0077]
式中s表示控制线性动态行为的矩阵:
[0078][0079]
其中,,a、b分别为电压值离散系统输入、输出矩阵,c、d分别为soc值输入、输出矩阵;
[0080]
矩阵s具体可由最小二乘法解出,即:
[0081][0082]
式中:代表矩阵x的伪逆矩阵。
[0083]
则根据式(4)、(5),应用向前欧拉法,根据公式可以将两个离散状态量(xi,yi)通过状态向量导数联系起来,获得动态线性模型的离散方程:
[0084][0085]
其中,qk为上一时刻单体电池电量,k为电池编号,m为高电量单体电池数,am、bm为离散控制矩阵,ts为离散转置矩阵;
[0086]
整理得到:
[0087]qk 1
=aiqk biukꢀꢀꢀꢀꢀꢀ
(7)
[0088]
式中:ai=amts ω为离散系统矩阵,bi=bmts为离散输入矩阵。
[0089]
则可以得到电池单体的预测控制模型为:
[0090]
[0091]
式中,为第i个单体电池电量预测值,ai、bi为第i个离散系统输入、输出矩阵,为第i个单体电磁电压值,m表示电池组中单体电池数目。
[0092]
即本实施例步骤s101中,具体先按照式(3)构建动态线性模型,以及按式(4)构建矩阵s,经过最小二乘法解出s,再根据式(4)、(5),应用向前欧拉法获得如式(6)动态模型的离散方程,最终推导得出如式(8)的电池单体的预测控制模型。
[0093]
本实施例步骤s2中按照下式对预测控制模型进行最优均衡阈值的求解:
[0094][0095]
其中,qc为均衡中心点,δ(qc)为求解均衡中心点构建的函数,δ为区间长度,f是关于qi的函数,η为能量转换率,m为高电量单体电池数,r为低电量单体电池数;
[0096]
将δ(qc)的最小值点所对应的阈值作为最优均衡阈值。
[0097]
上述式(9)中,δ一般取2%qc(也可以根据实际需求取其他值),则对应阈值为[1
±
2%(1 f)]qc,η为能量转换率。分析公式(9)可知,函数δ(qc)|为一个凹函数,经分析不难得出:函数δ(qc)|只存在一个极点,且为最小值点,则由该最小值点对应阈值即可得到预测控制模型下实时最优阈值。
[0098]
求解出最优阈值后,进一步需对均衡点中心进行求解,考虑到中单体电池soc值通常分布在soc均值q
av
附近,本实施例设置该均值q
av
作为均衡点中心求解的起点,再通过一维探索方法快速求解出均衡点中心。如图2所示,步骤s2中使用一维探索方法求解均衡点中心的步骤具体包括:
[0099]
s201.输入单体电池初始soc值q,求解模拟预测模型中f和δ,计算单体电池soc值均值q
av
并作为起始点q
c0
;
[0100]
s202.按照求解步长取下一个节点q
c1
,即q
c1
=q
av
h,其中h为求解步长,根据确定的m和r计算得到qm和q
l
,qm和q
l
分别为对应高、低电量单体电池均衡中心点参考值;
[0101]
s203.比较qm和q
l
,若δqm《δq
l
,则返回步骤s202以继续求解;若δqm》δq
l
,则回到起始点q
c0
并向另一方向求解;
[0102]
s204.遍历完所有电池单体初始soc值q以后,筛选出δq的最小值δq
min
并作为均衡中心点。
[0103]
本实施例通过采用一维探索法探寻均衡中心点,并在求解过程中加入是否向前求解判据,探索求解过程先从均衡中心点一侧出发,探寻该方向下所有符合条件的soc值,若符合条件则继续探索,不符合条件则向另一侧探索,由于soc值是实时变化的,通过上述方式可以提高探索效率,相比需要对每一个soc值轮流判定的传统均衡策略,可以进一步提高均衡效率,有效降低均衡时长。
[0104]
上述步骤s202中具体按下式计算δq1和δq0:
[0105][0106][0107]
δq=|q
m-q
l
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0108]
其中,qm为高电量电池单体均衡中心点,q
l
为低电量电池单体均衡中心点,qi为第i个电池soc值,qc为均衡中心点,qj为第j个电池soc值,δ为区间长度,f是关于qi的函数。
[0109]
如图3所示,本实施例步骤s2中mpc方法的具体控制步骤包括:
[0110]
s211.初始化后采集被测输入控制矢量,设定目标控制值x
set
;
[0111]
s212.将当前时刻采集到的输入控制矢量输入所述预测控制模型,预测得到当前时刻t对下一时刻的预测序列内的状态变量x
t 1
,即为模型预测值;
[0112]
s213.计算当前时刻与上一时刻的所述模型预测值之间的差值,得到预测误差δq;
[0113]
s214.以所述预测误差δq最小作为目标函数,对输入控制矢量进行n步预测控制,由每一次输出结果得到各单体电池的实时转移电量序列。
[0114]
本实施例中步骤s3包括:将实时求解得到的均衡中心点与单体电池soc值进行比较,对差值在预设区间内的电池组进行均衡控制,根据求解得到的最优均衡阈值以及预测的所述各单体电池的实时转移电量控制单体电池间转移电量数。
[0115]
本实施例中具体通过构建电量转移矩阵,电量转移矩阵中元素为均衡过程第i个电池单体向第j个电池单体转移x单位电量x
ij
,其中第i个电池单体的soc值高于第j个电池单体,使用电量转移矩阵的稀疏度s(t)表示单体电池间转移电量数,使用各单体电池的实时转移电量求解转移矩阵的稀疏度s(t)的最小值,以控制按照求解的最小值实现均衡控制。通过根据均衡阈值得到电量转移方程,即得到单体电池间最优电量转移方案,可以减少单体电池间无效充放电次数,提高均衡电路工作效率。
[0116]
假设x
ij
为均衡过程中,则高soc值电池单体i向低soc值电池单体j转移x单位电量,据此可得到电量转移矩阵tm×r:
[0117][0118]
由上述转移矩阵的稀疏度s(t)表示电池单体间电量转移次数。为使整个电池组均衡效率达到最高,转移次数应尽量减少,因此可将均衡策略求解问题转化为求解矩阵稀疏度s(t)最小值问题。
[0119]
针对含约束条件的优化问题,可利用以下公式(14)进行求解:
[0120][0121]
即可按照式(14)求解出矩阵稀疏度s(t)最小值,得到最优的电池单体间电量转移次数。
[0122]
设转置矩阵x
t
=[x
11
,x
12
,
…
x
1r
,x
21
…
x
mr
]1×
mr
为公式(14)的一个解向量,则x
ij
所需的转移时间为t
ij
,则有:
[0123][0124]
其中,t为控制器产生的脉冲信号周期,δq为该周期内两单体电池间转移的电量。
[0125]
转移时间t
ij
可以反映均衡控制性能,按照上述计算出转移时间t
ij
后即可判断当前均衡控制性能是否达到预设要求,如果不满足,则重新执行均衡控制,直至均衡控制性能能够达到预设要求。
[0126]
本发明通过从单体电池实时状况(电压,soc值)出发,实时动态求解出最优的均衡阈值以及均衡中心点,相较于传统的设置单一阈值方法的均衡策略,可以有效减少无效阈值的求解次数,提高均衡过程的效率。
[0127]
本实施例基于mpc的电池均衡控制装置,包括处理器以及存储器,存储器用于存储计算机程序,处理器用于执行计算机程序,处理器用于执行计算机程序以执行如上述方法。
[0128]
本发明可以适用于磷酸铁锂电池以进行电池组内单体电池间的均衡控制,当然也可以根据实际需求适用于其他类型电池中以进行电池组内单体电池间的均衡控制。
[0129]
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。