1.本发明属于机群协同作业安全控制技术领域,涉及一种多种工程机械协同作业下的防碰撞系统自组网方法。
背景技术:
2.现代大规模、群体建筑的施工需要多种类型的工程机械群体(以下简称机群)协同作业,用于施工的多种工程机械可包括塔式起重机(塔机)、汽车吊、履带吊及混凝土泵车等。这些工程机械的特点是大都为刚性臂架结构、体积大、质量大,在协同作业时各机械设备之间容易发生碰撞等恶性事故。
3.近年来,施工现场陆续推广使用了群塔防碰撞系统,由于塔机臂架结构大,空间作业范围大,在进行防碰撞计算的时候,不能简单处理为一个实体空间障碍物,需要利用塔机的结构参数及运行状态,通过空间干涉计算。塔机的运行状态是通过防碰撞设备实时监测,而塔机的其它结构参数则是人工设置的,这种方法对于位置固定的塔机群而言只需要进行一次组网,对于一个复杂施工现场既有位置固定的塔机,又有流动的汽车吊、履带吊及混凝土泵车的时候,多种设备的机群防碰撞网的组建就非常繁琐了,系统的维护工作量很大。
技术实现要素:
4.本发明的目的是提供一种多种工程机械协同作业下的防碰撞系统自组网方法,解决了现有技术在机群防碰撞网构建过程中,人工组建繁琐,对于流动设备防碰撞网组建维护工作量大的问题。
5.本发明所采用的技术方案是,一种多种工程机械协同作业下的防碰撞系统自组网方法,按照以下步骤实施:
6.步骤1:每个施工设备的防碰撞系统开机初始化,创建并初始化机群的静态信息表、动态信息表及临时信息表;
7.步骤2:机群自组网阶段;
8.每个防碰撞系统开机后,首先利用无线数据处理,完成机群自组网,系统无线数据处理包括接收数据处理与发送数据处理两个并行流程;设某施工现场有n台设备,以其中编号为k的设备为例,根据发送数据处理与接收数据处理流程,防碰撞自组网流程如下:
9.2.2.1)发送命令01;
10.设备k周期性发送命令01,并等待接收其它设备的数据;
11.2.2.2)接收设备i的命令01,第一次更新设备k的临时信息表,发送命令03;
12.设备k接收到设备i的命令01,此时,设备i不在设备k的临时信息表中,于是,设备k第一次更新临时信息表,添加设备i;并且设备k发送命令03,即向设备i请求静态信息;与此同时,设备i也会接收到设备k的命令01,也会第一次更新本机临时信息表,并发送命令03;
13.2.2.3)接收设备i的命令03,发送命令02;
14.设备k在接收到设备i的命令03后,设备k将发送命令02,即发送本设备k的静态参
数;与此同时,设备i在接收到设备k的命令03后,设备i也将发送命令02,即发送本设备i的静态参数;
15.2.2.4)接收设备i的命令02,第一次更新设备k的静态信息表,并第二次更新设备k的临时信息表;
16.设备k接收到设备i的命令02,设备k将第一次更新本机的静态参数表,并删除设备k临时信息表的,设备i的编号,第二次更新设备k的临时信息表;
17.2.2.5)接收设备i的命令01,第一次更新设备k的动态信息表;
18.设备k接收到设备i的命令01,此时,设备i已经在设备k的静态参数表中,于是,设备k利用设备i命令01中的数据第一次更新动态信息表;
19.至此,设备k完成了静态信息表及动态信信息表的构建,即完成了防碰撞网的构建;以此类推,机群内每一个施工设备都按上述流程完成防碰撞网的自建;
20.步骤3,机群中某个设备位置变化,第二次更新动态信息表,实现防碰撞网重组;
21.机群完成防碰撞组网后,各设备仍然会周期性发送命令01,当施工现场中某个施工设备i的坐标位置发生移动,该设备i的命令01中的信息将会变换,此时,设备k将根据接收到的其它设备i的命令01第二次更新动态信息表,实现防碰撞网的实时重组。
22.本发明的有益效果是,利用防碰撞系统的无线通讯实现多机种协同作业的机群防碰撞网的自组织,自更新,有效解决了机群防碰撞网人工组建工作量大,算法实时性好,能够满足工程应用的需要。
附图说明
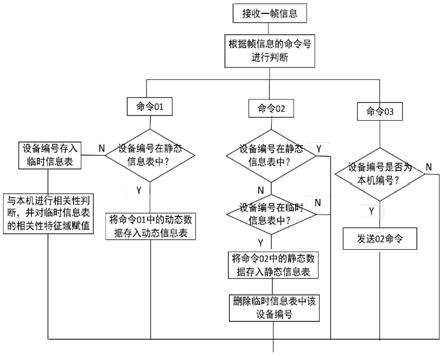
23.图1是本发明方法中的防碰撞系统接收数据处理流程简图;
24.图2是本发明方法中机群相关性判断原理图;
25.图3是本发明方法中的防碰撞系统发送数据流程简图;
26.图4是本发明方法整体的防碰撞自组网流程;
27.图5是本发明方法实施例中三台施工设备的初始位置分布简图;
28.图6是本发明方法实施例中一台设备移动后与另外两台设备的相对位置分布简图。
具体实施方式
29.下面结合附图和具体实施方式对本发明进行详细说明。
30.群塔防碰撞计算是利用机群在空间的相对位置及姿态进行空间干涉计算,在每台塔机上安装有获取本机信息并执行防碰撞计算的防碰撞系统,各塔机之间通过无线通讯实现信息交互。根据群塔防碰撞计算原理,本发明方法描述的机群的防碰撞系统也采用分布式网络结构,在一个机群的网络内,每台设备上均安装有一套防碰撞系统,负责本机的编号、本机的静态信息设置、及本机运行状态监测;机群的姿态由相关设备的结构参数及设备运行状态决定,其中,相关设备的结构参数一并称为静态信息,一般不会随时变化;设备运行状态一并称为动态信息,决定了机械设备在空间的臂架姿态。因此,构建机群防碰撞网,需要得到该协同作业机群内的设备的编号、静态信息及动态信息。
31.构建机群防碰撞网时,需要利用防碰撞系统的无线通讯功能进行数据交互,定义
机群之间的无线通讯的命令帧格式如表1所示。
32.表1、命令帧格式
[0033][0034]
再根据表1,定义了以下四个概念:
[0035]
a1)帧头:定义了一帧数据开始,帧头设定为0x40;
[0036]
a2)命令编号:代表塔机之间的命令内容,围绕机群防碰撞网的组建有三个命令;
[0037]
a3)发送数据的设备编号:代表该命令的发送设备;
[0038]
a4)发送数据的设备类型:代表发送该命令的设备类型。
[0039]
本发明方法适用的施工现场多种机械设备,包括但不限于平臂塔机、动臂塔机、塔头塔机、轨道移动塔头塔机、轨道移动动臂塔机、轨道移动平臂塔机、汽车吊、履带吊、混凝土泵车等,再定义以下两个概念:
[0040]
b1)数据域:该命令传输相关数据,不同命令的数据长度不同;
[0041]
b2)效验位:本发明方法采用了crc效验。
[0042]
基于上述数据格式,在进行机群防碰撞网的构建中,还定义了三个主要的命令,具体内容是:
[0043]
c1)命令01,是发送本设备动态信息的命令帧,一般设备的动态信息包括:设备当前位置、设备转角、设备幅度、设备高度及设备移动方向;为了保证防碰撞计算的效率,设备之间周期性进行动态数据交互,必须频率高,因此,该命令的数据域要尽量简短,主要是设备运行的动态信息;
[0044]
c2)命令02,是发送设备静态信息的命令帧,该命令帧中的数据域是根据设备不同而定义的;该数据帧用于发送设备的静态信息,当设备接收到机群其它设备的请求命令,设备才发送该命令;
[0045]
c3)命令03,是请求设备静态信息的命令帧,该命令的“设备编号”域为目标设备的编号,命令的“数据域”为00;当机群中某设备向编号为4的设备发送该命令,命令的“设备编号”域为04,则是请求4号设备发送静态信息;编号04的设备接收到命令03,则发送命令02,即将本机的静态信息发送出去。
[0046]
防碰撞系统的上述三个命令中,命令01为设备的主动命令,设备工作状态就无条件周期性主动发送该命令(优选200ms的周期);命令02及命令03的发送则是随机、不确定的。
[0047]
在机群的防碰撞计算中,需要用到机群各设备的静态信息及动态信息,本发明方法定义了机群的静态信息表、动态信息表及临时信息表,用于构建防碰撞网:
[0048]
1)机群的静态信息表,用于存储该机群内设备的编号及设备的结构信息,如表2所示,包括设备编号与静态数据两个域,其中的静态数据域是根据设备不同定义的;
[0049]
表2、机群的静态信息表
[0050]
设备编号1byte设备类型1byte静态数据域(不固定字节)0x01~0x990x01~0x0f
‑‑‑
[0051]
2)机群的动态信息表,用于存储设备的动态信息,如表3所示,包括设备编号及动态数据两个域,其中的动态数据域是根据设备的运动定义的,不同设备有不同的运动,决定了设备的空间姿态;
[0052]
表3、机群的动态信息表
[0053][0054]
3)机群的临时信息表,用于临时设备编号的储存,如表4所示,包括临时设备编号与相关性特征域;相关性特征域是该临时设备与本机是否存在碰撞可能的描述;
[0055]
表4、机群的临时信息表
[0056]
临时设备编号1byte相关性特征域1byte0x01~0x990x0或0x01
[0057]
本发明的多种工程机械协同作业下的防碰撞系统自组网方法,通过设置防碰撞系统无线数据接收与发送的两个流程,配合合理的命令,实现机群防碰撞网的组建,按照以下步骤实施:
[0058]
步骤1:每个施工设备的防碰撞系统开机初始化,创建并初始化机群的静态信息表、动态信息表及临时信息表;
[0059]
步骤2:机群自组网阶段;
[0060]
每个防碰撞系统开机后,首先利用无线通讯的数据处理(以下简称无线数据处理),完成机群自组网,系统无线数据处理包括接收数据处理与发送数据处理,两个并行流程;
[0061]
2.1)参照图1,是本发明方法的防碰撞系统接收数据处理流程简图。首先根据表1的机群间命令帧的帧头及校验域,确定接收到正确的信息帧,然后根据命令帧的命令编号分别进行处理,接收数据处理的具体过程是:
[0062]
2.1.1)本机接收到命令01时,
[0063]
根据命令01中的“设备编号”判断发送命令的设备是否已经在本机的静态信息表中,如果确定在本机的静态信息表中,则将该设备与本机进行相关性判断,并将接收的命令01中的动态信息及相关状态存入动态信息表的相关设备中,用于后续的防碰撞计算;
[0064]
如果确定不在本机的静态信息表中,则将该“设备编号”存入临时信息表中,通过机群相关性判断原理进行判断并存储相关性特征域;
[0065]
参照图2是本发明方法中机群相关性判断原理图,机群相关性判断原理如下:定义每个施工设备的作业范围为一个圆,圆心为该施工设备的位置,圆半径为该施工设备臂架的最大幅度。对于塔机而言,设备位置大都固定,而施工现场的流动设备如汽车吊、履带吊或泵车,其位置是不固定的,需要通过北斗系统等方式进行定位检测。例如在图2中,设备1的坐标位置为(x1,y1),设备2的坐标位置为(x2,y2),设备1、设备2的最大工作幅度分别为r1、r2,则该两个施工设备的相关性判断依据是:
[0066]
如果即两个圆相交,说明该两个施工设备有相关性;
[0067]
如果即两个圆不相交,说明该两个施工设备无相关性;
[0068]
2.1.2)本机接收到命令02时,
[0069]
判断该命令02中的“设备编号”是否已经在本机的静态信息表中存在,如果存在,则不处理;如果不存在,再判断该“设备编号”是否在临时信息表中,如果在临时信息表中,则将命令02的静态数据写入静态信息表,并从临时信息表中删除该“设备编号”;
[0070]
2.1.3)本机接收到命令03时,
[0071]
判断该命令03中的“设备编号”是否为本机编号,如果是,则发送命令02,即将本机的静态信息发送出去;如果不是,则不理会该命令。
[0072]
机群内各个设备的防碰撞系统之间主要发送前述的三个命令,其中,命令01周期发送本设备的动态信息;命令02是一个响应命令,是根据无线数据接收处理来执行,当本机接收到针对本机的命令03,则本机发送命令02将本机的静态信息发送出去;命令03是一个有条件的主动命令,是当本机的临时信息表中存在相关性的设备时,本机才会发送命令03,向该设备请求静态信息,如果本机临时信息表中不存在相关性设备,则不发送该命令03。
[0073]
本发明方法设计了一个用于处理发送数据命令堆栈,防碰撞系统周期性从堆栈中发送命令,参考图3是本发明方法中的防碰撞系统发送数据流程简图。防碰撞系统命令堆栈的数据来源有三个途径:一是防碰撞系统主动的周期性的产生命令01;二是防碰撞系统周期性的扫描本机的临时信息表,如果本机的临时信息表中有相关性的设备时,则根据临时信息表中的设备编号在发送命令堆栈中生成命令03;三是响应的应答命令,参考图1的接收数据处理流程,当本机接收到的其它设备的命令03,且命令中的“设备编号”为本机编号,则在本机发送命令堆栈中生成应答命令02。
[0074]
2.2)参照图4,是本发明方法整体的防碰撞自组网流程,设某施工现场有n台设备,以其中编号为k的设备为例,根据发送数据处理与接收数据处理流程,防碰撞自组网流程如下:
[0075]
2.2.1)发送命令01;
[0076]
设备k周期性发送命令01,并等待接收其它设备的数据;
[0077]
2.2.2)接收设备i的命令01,第一次更新设备k的临时信息表,发送命令03;
[0078]
设备k接收到设备i的命令01,此时,设备i不在设备k的临时信息表中,于是,设备k第一次更新临时信息表,添加设备i;并且设备k发送命令03,即向设备i请求静态信息;与此同时,设备i也会接收到设备k的命令01,也会第一次更新本机临时信息表,并发送命令03;
[0079]
2.2.3)接收设备i的命令03,发送命令02;
[0080]
设备k在接收到设备i的命令03后,设备k将发送命令02,即发送本设备k的静态参数;与此同时,设备i在接收到设备k的命令03后,设备i也将发送命令02,即发送本设备i的静态参数;
[0081]
2.2.4)接收设备i的命令02,第一次更新设备k的静态信息表,并第二次更新设备k的临时信息表;
[0082]
设备k接收到设备i的命令02,设备k将第一次更新本机的静态参数表,并删除设备k临时信息表的,设备i的编号,第二次更新设备k的临时信息表;
[0083]
2.2.5)接收设备i的命令01,第一次更新设备k的动态信息表;
[0084]
设备k接收到设备i的命令01,此时,设备i已经在设备k的静态参数表中,于是,设备k利用设备i命令01中的数据第一次更新动态信息表;
[0085]
至此,设备k完成了静态信息表及动态信信息表的构建,即完成了防碰撞网的构建;以此类推,机群内每一个施工设备都按上述流程完成防碰撞网的自建;
[0086]
步骤3,机群中某个设备位置变化,第二次更新动态信息表,实现防碰撞网重组;机群完成防碰撞组网后,各设备仍然会周期性发送命令01,当施工现场中某个施工设备i的坐标位置发生移动,该设备i的命令01中的信息将会变换,此时,设备k将根据接收到的其它设备i的命令01第二次更新动态信息表,实现防碰撞网的实时重组。
[0087]
实施例
[0088]
某施工现场布设有三台施工设备,其中包括两台固定塔机(tc1和tc2)和一台桁架吊臂汽车起重机(lc03)。塔机tc1的坐标为(0,0),塔机tc2的坐标为(110,40);桁架吊臂汽车起重机lc3由于是移动设备,其位置通过卫星定位检测,当前时刻桁架吊臂汽车起重机lc3的坐标位置为(210,20)。以该现场的设备tc2为例本发明实施例机群防碰撞网的组网过程如下:
[0089]
步骤1:三台施工设备的防碰撞系统开机初始化,三台施工设备中的动态信息表及临时信息表均为空,三台施工设备的静态信息表分别见表5、表6及表7。
[0090]
表5、塔机tc1初始化静态信息表(单位:米)
[0091][0092]
表6、塔机tc2初始化静态信息表(单位:米)
[0093][0094]
表7、桁架吊臂汽车起重机初始化静态信息表(单位:米)
[0095]
设备编号设备型号桁架吊臂长桁架臂宽汽车高lc307502.52
[0096]
步骤2:通过无线数据处理,完成自组网。
[0097]
2.1)所有设备主动向发送信息堆栈推送命令01,
[0098]
三台施工设备均开始发送命令01,三台施工设备发送的命令01详细信息分别见表8、表9、表10所示。
[0099]
表8、塔机tc1发送的命令01
[0100][0101]
表9、塔机tc2发送的命令01
[0102][0103]
表10、桁架吊臂汽车起重机lc3发送的命令01
[0104][0105]
2.2)以设备tc2为例,设备tc2接收到tc1及lc3的命令01,第一次更新tc2的临时信息表,发送命令03;
[0106]
a、更新临时信息表
[0107]
开机三台设备均在发送命令01,塔机tc2初始的临时信息表为空,因此,塔机tc2在接收到塔机tc1及桁架吊臂汽车起重机lc3分别发送的命令01后,判断发送命令的设备编号“01”及“03”均不在静态信息表中,随即在临时信息表中存入设备编号“01”及“03”,并根据命令01中的设备位置及设备最大工作幅度计算设备之间的相关特征,根据表8、表9、表10的参数及设备的相关性判断方法,得到塔机tc2防碰撞系统中的第一次更新的临时信息表,如表11所示。
[0108]
表11、塔机tc2中第一次更新的临时信息表
[0109]
设备编号相关性特征011(相关)031(相关)
[0110]
b、发送命令03
[0111]
根据发送数据处理的流程,塔机tc2周期性扫描静态信息表11,其中,有设备01及设备03均与tc2相关,塔机tc2将向塔机tc1及桁架吊臂汽车起重机lc03发送静态信息请求命令03,于是,塔机tc2向发送命令堆栈中推送命令03,该两个命令03的格式分别为:0x40,0x03,0x01,0x00,0x56及0x40,0x03,0x03,0x00,0x56;
[0112]
同理,塔机tc1及桁架吊臂汽车起重机lc03也会接收到塔机tc2发出的命令01后,也会更新临时信息表,并发送各自的命令03。
[0113]
2.3)设备tc2接收到tc1及lc3的命令03,发送命令02
[0114]
塔机tc2接收到塔机tc1及桁架吊臂汽车起重机lc03发送的命令03,塔机tc2判断命令02中的“设备编号”02与本机编号相同,于是,塔机tc2将发送命令02,即发送本机的静态参数;同时,塔机tc1及桁架吊臂汽车起重机lc03也会接收到塔机tc2发出的命令03,也会各自发送命令02;
[0115]
2.4)设备tc2接收到tc1及lc3的命令02,第一次更新设备k的静态信息表,第二次更新的临时信息表;
[0116]
塔机tc2接收到塔机tc1及桁架吊臂汽车起重机lc03发送的命令03,塔机tc2判断命令02中的“设备编号”02及03在本机的临时信息表中,但不在静态信息表中,于是,塔机tc2将命令02中的静态信息解析存入静态信息表中,同时,将临时信息表中的相应的设备编号删除;这样,塔机tc2防碰撞系统中的第一次更新的静态信息表如表12,第二次更新的临时信息表为空。
[0117]
表12、塔机tc2中第一次更新的静态信息表(单位:米)
[0118][0119]
2.5)设备tc2接收到tc1及lc3的命令01,第一次更新设备k的动态信息表;
[0120]
塔机tc2的静态信息表中存有相关的塔机tc1及桁架吊臂汽车起重机lc03,当塔机tc2再次接收到塔机tc2及桁架吊臂汽车起重机lc03的命令01,塔机tc2将会在动态信息表中创建塔机tc1的编号01,及桁架吊臂汽车起重机lc03的编号03,并把塔机tc1及桁架吊臂汽车起重机lc03的命令01中的动态信息第一次更新到动态信息表中,得到表13所示的动态信息表。
[0121]
表13、塔机tc2中第一次更新的动态信息表(单位:米)
[0122][0123]
自此,塔机tc2防碰撞系统中得到更新的静态信息表、动态信息表及临时信息表,分别为表12及表13,得到了塔机tc2当前状态下的防碰撞网。图5是根据塔机tc2的静态信息表(表12)及动态信息表(表13)画出来的现场三台施工设备的相对位置关系,由图4可见,塔机tc2与塔机tc1及桁架吊臂汽车起重机lc3都相关。
[0124]
步骤3,桁架吊臂汽车起重机lc3位置变化后,塔机tc2第二次更新动态信息表,实现防碰撞网重组;
[0125]
由于桁架吊臂汽车起重机lc3是可移动的,当桁架吊臂汽车起重机lc3工作需要移动到新位置,新的位置坐标变为(240,40),此时,桁架吊臂汽车起重机lc3发送的01命令变为表14。
[0126]
表14、移动后桁架吊臂汽车起重机lc3发送的命令01
[0127][0128]
塔机tc2防碰撞系统接收到表14的命令01后,塔机tc2防碰撞系统判断03设备已经在静态信息表中,于是进行相关性判断,确认此时塔机tc2与桁架吊臂汽车起重机lc3不再相关,塔机tc2主动更新动态信息表中设备03的“相关性”,第二次更新动态信息表,得到表15。
[0129]
表15、塔机tc2第二次更新的动态信息表(单位:米)
[0130][0131]
当桁架吊臂汽车起重机lc3位置变化后,塔机tc2重组的防碰撞网为表12及表15,图6是根据塔机tc2的静态信息表(表12)及动态信息表(表15)画出来的三台施工设备的相对位置关系。
[0132]
以此类推,塔机tc1及桁架吊臂汽车起重机lc3各自的防碰撞网都同时完成重组。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。