1.本发明涉及垂直多关节机器人,尤其涉及具备电动机和减速器的垂直多关节机器人。
背景技术:
2.以往,已知有具备电动机和减速器的垂直多关节机器人。这样的垂直多关节机器人例如在日本特许第5257263号公报中被公开。
3.在上述日本特许第5257263号公报中,公开了七轴的垂直多关节机器人。该垂直多关节机器人的七个关节轴分别具备在输出轴具有中空部的内置有减速器的致动器。在该内置有减速器的致动器的输出轴的中空部插通有电力线、信号线等配线。
4.现有技术文献
5.专利文献
6.专利文献1:日本特许第5257263号公报
技术实现要素:
7.发明所要解决的课题
8.但是,在上述日本特许第5257263号公报所记载的垂直多关节机器人中,由于在电动机轴的中空部插通配线,因此内置有减速器的致动器的输入部的绕旋转轴线的惯性(惯性矩)变大。因此,存在难以提高内置有减速器的致动器的转速和旋转加速度的问题。
9.本发明是为了解决如上所述的课题而完成的,本发明的一个目的在于提供一种能够提高关节轴部单元的转速和旋转加速度的垂直多关节机器人。
10.用于解决课题的技术方案
11.本发明的一个方面的垂直多关节机器人具备:多个臂部;多个关节轴部单元,对多个臂部进行旋转驱动;及配线单元,多个关节轴部单元的配线部配置于该配线单元,多个关节轴部单元中的至少除了供工具安装的前端关节轴部单元以外的关节轴部单元一体地包括:第一电动机,包括实心的第一电动机轴;及第一减速器,与第一电动机轴直接连结。
12.在本发明的一个方面的垂直多关节机器人中,如上所述,设置供多个关节轴部单元的配线部配置的配线单元,并且将多个关节轴部单元中的至少除了供工具安装的前端关节轴部单元以外的关节轴部单元构成为一体地包括:第一电动机,包括实心的第一电动机轴;及第一减速器,与第一电动机轴直接连结。由此,与在电动机轴的中空部插通配线的情况相比,能够减少关节轴部单元的输入部的绕旋转轴线的惯性(惯性矩),因此能够提供一种能够与将关节轴部单元的输入部的绕旋转轴线的惯性减少的量相应地,提高关节轴部单元的转速和旋转加速度的垂直多关节机器人。
13.另外,如上所述,设置对多个臂部进行旋转驱动的多个关节轴部单元和供多个关节轴部单元的配线部配置的配线单元。由此,能够以单元为单位进行垂直多关节机器人的组装和保养(单元的更换等),因此能够容易地进行垂直多关节机器人的组装和保养。
14.在上述一个方面的垂直多关节机器人中,优选地,前端关节轴部单元是一体地包括供工具安装的前端关节轴部、和连接到前端关节轴部的与前端侧相反的一侧的前端前关节轴部的单元。如果这样构成,则能够一体地处理前端关节轴部和前端前关节轴部这两个关节轴部,因此与不能一体地处理前端关节轴部和前端前关节轴部的情况相比,能够容易地进行前端关节轴部和前端前关节轴部的组装和保养。其结果是,能够更容易地进行垂直多关节机器人的组装和保养。
15.在该情况下,优选地,前端关节轴部包括:第二电动机,包括第二电动机轴;及第二减速器,经由带机构与第二电动机轴连结,前端前关节轴部包括:第三电动机,包括实心的第三电动机轴;及第三减速器,与第三电动机轴直接连结,前端关节轴部单元一体地包括第二电动机、带机构、第二减速器、第三电动机和第三减速器。如果这样构成,则能够一体地处理前端关节轴部的第二电动机、带机构和第二减速器、及前端前关节轴部的第三电动机和第三减速器,因此能够容易地进行前端关节轴部的第二电动机、带机构和第二减速器、及前端前关节轴部的第三电动机和第三减速器的组装和保养。另外,即使在设置需要进行带的张力的调整的带机构的情况下,也能够将使用中的前端关节轴部单元更换为包括对带的张力进行了调整的状态的带机构的前端关节轴部单元,因此不需要进行更换时的带机构的带的张力的调整。其结果是,与在更换时进行带机构的带的张力的调整的情况相比,能够容易地进行包括带机构的前端关节轴部单元的更换。
16.在上述一个方面的垂直多关节机器人中,优选地,配线单元构成为兼用作多个臂部中的至少一个臂部。如果这样构成,则能够兼用配线单元和臂部,因此与将配线单元与臂部分开地设置的情况相比,能够简化用于配线单元的构造。
17.在该情况下,优选地,配线单元一体地包括配线配置部、和保持配线配置部并且兼用作臂部的外装部。如果这样构成,则能够在配线配置部可靠地配置配线部,并且能够通过兼用作臂部的外装部抑制构造的复杂化及元件数量的增加。
18.在上述配线单元兼用作臂部的结构中,优选地,臂部包括一对臂体,该一对臂体包括:第一臂体,受到第一电动机的驱动力;及第二臂体,相对于第一臂体对向配置,并且不受到第一电动机的驱动力,配线单元构成为兼用作一对臂体中的第二臂体。如果这样构成,则能够兼用不直接受到第一电动机的驱动力的第二臂体和配线单元,因此与兼用受到第一电动机的驱动力的第一臂体和配线单元的情况相比,即使在配线单元兼用作臂部的情况下,也能够有效地抑制兼用作臂部的配线单元的构造的复杂化。
19.在上述一个方面的垂直多关节机器人中,优选地,多个关节轴部单元中的至少一个关节轴部单元一体地包括:第一电动机,其为不包括制动器的电动机;第一减速器;及制动器,相对于第一减速器配置于第一电动机侧,用于保持第一电动机。如果这样构成,则能够将制动器配置于第一电动机侧,因此能够将制动器配置在尽可能接近第一电动机的位置。其结果是,能够稳定地进行制动器对第一电动机的保持。
20.在上述一个方面的垂直多关节机器人中,优选地,多个关节轴部单元中的至少一个关节轴部单元一体地包括:第一电动机,其为不包括制动器的电动机;第一减速器;及制动器,相对于第一减速器配置于与第一电动机侧相反的一侧,用于保持第一电动机。如果这样构成,则能够将制动器配置于与第一电动机侧相反的一侧,因此能够将制动器配置于尽可能接近臂部的表面的位置。其结果是,能够将制动器配置于容易进行制动器的更换等针
对制动器的保养作业的位置。
21.发明效果
22.根据本发明,如上所述,能够提供一种能够提高关节轴部单元的转速和旋转加速度的垂直多关节机器人。
附图说明
23.图1是表示第一实施方式的垂直多关节机器人的整体结构的立体图。
24.图2是表示第一实施方式的垂直多关节机器人的整体结构的分解立体图。
25.图3是表示第一实施方式的垂直多关节机器人的第一关节轴部单元的立体图。
26.图4是表示第一实施方式的垂直多关节机器人的第一关节轴部单元的剖视图。
27.图5是表示第一实施方式的垂直多关节机器人的第二关节轴部单元的立体图。
28.图6是表示第一实施方式的垂直多关节机器人的第二关节轴部单元的剖视图。
29.图7是表示第一实施方式的垂直多关节机器人的第三关节轴部单元的立体图。
30.图8是表示第一实施方式的垂直多关节机器人的第三关节轴部单元的剖视图。
31.图9是表示第一实施方式的垂直多关节机器人的第二关节轴部配线单元的立体图。
32.图10是表示第一实施方式的垂直多关节机器人的第二臂部、第二关节轴部单元、第三关节轴部单元及第二关节轴部配线单元的剖视图。
33.图11是表示第一实施方式的垂直多关节机器人的第四关节轴部单元的立体图。
34.图12是表示第一实施方式的垂直多关节机器人的第四关节轴部单元的剖视图。
35.图13是表示第一实施方式的垂直多关节机器人的第四关节轴部配线单元的立体图。
36.图14是表示第一实施方式的垂直多关节机器人的第五、六关节轴部单元的立体图。
37.图15是表示第一实施方式的垂直多关节机器人的第五、六关节轴部单元的剖视图。
38.图16是表示第一实施方式的垂直多关节机器人的第五、六关节轴部单元的剖视图。
39.图17是表示第二实施方式的垂直多关节机器人的整体结构的分解立体图。
40.图18是表示第二实施方式的垂直多关节机器人的第二关节轴部单元的立体图。
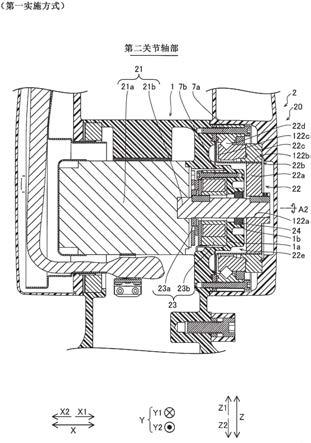
41.图19是表示第二实施方式的垂直多关节机器人的第二关节轴部单元的剖视图。
42.图20是表示第二实施方式的垂直多关节机器人的第三关节轴部单元的立体图。
43.图21是表示第二实施方式的垂直多关节机器人的第三关节轴部单元的剖视图。
44.图22是表示第二实施方式的垂直多关节机器人的第二臂部、第二关节轴部单元、第三关节轴部单元及第二关节轴部配线单元的剖视图。
具体实施方式
45.以下,基于附图对将本发明具体化的实施方式进行说明。
46.[第一实施方式]
[0047]
(垂直多关节机器人的结构)
[0048]
参照图1~图16,对本发明的第一实施方式的垂直多关节机器人100的结构进行说明。
[0049]
如图1所示,垂直多关节机器人100是具有六个自由度的六轴机器人。垂直多关节机器人100构成为经由基座部100a设置于地板等设置面。
[0050]
垂直多关节机器人100具备多个(六个)臂部1~6和对多个臂部1~6进行旋转驱动的多个(六个)关节轴部10~60。多个臂部1~6包括第一臂部1、第二臂部2、第三臂部3、第四臂部4、第五臂部5及第六臂部6。另外,多个关节轴部10~60包括第一关节轴部10、第二关节轴部20、第三关节轴部30、第四关节轴部40、第五关节轴部50及第六关节轴部60。另外,第五关节轴部50及第六关节轴部60分别是要求保护的范围中的“前端前关节轴部”及“前端关节轴部”的一例。
[0051]
第一关节轴部10构成为绕旋转轴线a1旋转驱动第一臂部1,该旋转轴线a1在沿着铅垂方向(z方向)的方向上延伸。第一臂部1构成为将第一关节轴部10与第二关节轴部20连结。第二关节轴部20构成为绕旋转轴线a2旋转驱动第二臂部2,该旋转轴线a2在沿着与第二臂部2的延伸方向正交的宽度方向(x方向、水平方向)的方向上延伸。第二臂部2构成为将第二关节轴部20与第三关节轴部30连结。第三关节轴部30构成为绕旋转轴线a3旋转驱动第三臂部3,该旋转轴线a3在沿着与第三臂部3的延伸方向正交的宽度方向(x方向、水平方向)的方向上延伸。第三臂部3构成为将第三关节轴部30与第四关节轴部40连结。
[0052]
第四关节轴部40构成为绕旋转轴线a4旋转驱动第四臂部4,该旋转轴线a4在沿着第四臂部4的延伸方向(y方向)的方向上延伸。第四臂部4构成为将第四关节轴部40与第五关节轴部50连结。第五关节轴部50构成为绕旋转轴线a5旋转驱动第五臂部5,该旋转轴线a5在沿着水平方向(x方向)的方向上延伸。第五臂部5构成为将第五关节轴部50与第六关节轴部60连结。第六关节轴部60构成为绕旋转轴线a6旋转驱动第六臂部6,该旋转轴线a6在沿着与旋转轴线a5正交的方向(y方向)的方向上延伸。第六臂部6是工具凸缘,构成为供工具6a(末端执行器)安装。第五关节轴部50、第五臂部5、第六关节轴部60和第六臂部6对应于手腕构造。
[0053]
在此,在第一实施方式中,如图2所示,垂直多关节机器人100为了使组装和保养容易而被单元化。具体而言,垂直多关节机器人100具备第一关节轴部单元10a、第二关节轴部单元20a、第三关节轴部单元30a、第四关节轴部单元40a及第五、六关节轴部单元50a。此外,垂直多关节机器人100具备第二关节轴部配线单元70a和第四关节轴部配线单元80a。另外,垂直多关节机器人100具备:安装于第二关节轴部配线单元70a的罩70b;及安装于第四关节轴部配线单元80a和第五、六关节轴部单元50a的副臂部80b和罩80c。垂直多关节机器人100构成为能够以单元为单位进行更换。
[0054]
另外,第一关节轴部单元10a、第二关节轴部单元20a、第三关节轴部单元30a、第四关节轴部单元40a及第五、六关节轴部单元50a是要求保护的范围中的“关节轴部单元”的一例。另外,第五、六关节轴部单元50a是要求保护的范围中的“前端关节轴部单元”的一例。第二关节轴部配线单元70a和第四关节轴部配线单元80a是要求保护的范围中的“配线单元”的一例。
[0055]
(第一关节轴部单元的结构)
[0056]
如图2~图4所示,第一关节轴部10构成为形成一体地包括第一关节轴部10、第一臂部1和基体10b的第一关节轴部单元10a。第一关节轴部单元10a构成为能够在一体地包括第一关节轴部10、第一臂部1和基体10b的状态下进行安装和拆卸。
[0057]
第一关节轴部10包括电动机11和减速器12。另外,电动机11和减速器12分别是权利要求书中的“第一电动机”和“第一减速器”的一例。
[0058]
电动机11构成为产生用于旋转驱动第一臂部1的驱动力。电动机11通过未图示的螺钉等固定件而安装于基体10b。电动机11包括壳体11a和实心的电动机轴11b。壳体11a构成为收容定子、转子、制动器等。即,电动机11是在壳体11a内包括制动器的带制动器的电动机。电动机轴11b是电动机11的输出轴,构成为在沿着旋转轴线a1的延伸方向(z方向)的方向上延伸。电动机轴11b与减速器12直接连结。另外,电动机轴11b是要求保护的范围中的“第一电动机轴”的一例。
[0059]
减速器12与电动机11同轴地配置,并且与电动机11的电动机轴11b直接连结。减速器12是包括波发生器12a、柔性齿轮12b和刚性齿轮12c的波动齿轮减速器。波发生器12a是减速器12的输入部,在电动机轴11b插入到连结用的贯通孔112a的状态下,通过键和紧定螺钉而与电动机轴11b连结。柔性齿轮12b是减速器12的输出部,与第一臂部1连接。刚性齿轮12c是减速器12的固定部,安装于基体10b。另外,减速器12包括轴承部12d。轴承部12d将柔性齿轮12b以能够相对于刚性齿轮12c旋转的方式进行保持。轴承部12d是交叉滚子轴承。
[0060]
另外,波发生器12a具有在旋转中心具有电动机轴11b的插入用的贯通孔112a的椭圆型的圆盘形状。波发生器12a被压入到柔性齿轮12b的后述的圆筒部112b。柔性齿轮12b具有圆筒部112b和凸缘部112c。圆筒部112b构成为具有中空形状,并在沿着旋转轴线a1的延伸方向(z方向)的方向上延伸。圆筒部112b具有与刚性齿轮12c的内齿啮合的外齿。凸缘部112c构成为具有圆环形状,并从圆筒部112b的与电动机11侧相反的一侧(z1方向侧)的端部向外侧(从旋转中心离开的一侧)延伸。刚性齿轮12c具有圆环形状,并且具有与柔性齿轮12b的外齿啮合的内齿。
[0061]
作为减速器12的输出部的柔性齿轮12b在凸缘部112c通过未图示的螺钉等固定件而安装于第一臂部1。另外,作为减速器12的固定部的刚性齿轮12c通过螺钉等固定件7a而安装于基体10b。
[0062]
第一关节轴部单元10a一体地包括:电动机11,包括实心的电动机轴11b;及减速器12,与电动机11直接连结。具体而言,第一关节轴部单元10a一体地包括电动机11、减速器12、第一臂部1和基体10b。
[0063]
基体10b构成为收容第一关节轴部10的电动机11和减速器12。另外,基体10b在z2方向侧的端部具有基座部100a。另外,基体10b在内部具有配线配置部13。配线配置部13配置成包围第一关节轴部10的电动机11。配线配置部13构成为将配线部8的第一部分8a与基体10b区划而进行保持。配线部8的第一部分8a与配线部8的后述的第二部分8b(参照图6等)连接。
[0064]
配线部8例如包括信号线、动力线、通信线等配线和供给用于对机械手等工具6a进行驱动的空气的空气配管。另外,配线部8包括配线收容管,该配线收容管收容信号线、动力线、通信线等配线和空气配管。配线部8以配线和空气配管被收容于配线收容管的状态配置。
[0065]
配线配置部13为了抑制配线部8的第一部分8a的摩擦,由低摩擦的树脂材料构成。在配线配置部13中,配线部8的第一部分8a以具有折回部分的方式配置。具体而言,在配线配置部13中,配线部8的第一部分8a在从y方向观察时配置成u字状。另外,配线配置部13具有可动侧部分13a和固定侧部分13b。可动侧部分13a相对于固定侧部分13b配置于第一臂部1侧(z1方向侧),构成为能够对应于第一臂部1绕旋转轴线a1的旋转而移动。固定侧部分13b相对于可动侧部分13a配置于与第一臂部1侧相反的一侧(z2方向侧),并以不动的方式固定于基体10b。
[0066]
另外,如图2所示,在基体10b以能够装卸的方式设置有带配线连接器的罩10c。带配线连接器的罩10c具有用于信号线、动力线、通信线、空气配管等配线部8的多个连接器10d。另外,在第一臂部1以能够装卸的方式设置有配线保养用罩10e。配线保养用罩10e构成为,在从第一臂部1拆下的情况下,使配线部8的第一部分8a及第二部分8b、后述的电动机21等露出于外部。由此,能够容易地进行配线部8的第一部分8a与第二部分8b的配线连接作业、配线部8与电动机21的配线连接作业等配线作业。
[0067]
(第二关节轴部单元的结构)
[0068]
如图2、图5和图6所示,第二关节轴部单元20a是一体地包括第二关节轴部20的电动机21、减速器22、制动器23、油封24和保持部件25的电动机单元。第二关节轴部单元20a构成为能够在一体地包括电动机21、减速器22、制动器23、油封24和保持部件25的状态下进行安装和拆卸。另外,电动机21和减速器22分别是要求保护的范围中的“第一电动机”和“第一减速器”的一例。
[0069]
电动机21构成为产生用于旋转驱动第二臂部2的驱动力。电动机21包括壳体21a和实心的电动机轴21b。壳体21a构成为收容定子、转子等。另一方面,壳体21a构成为不收容制动器和油封。即,电动机21是在壳体21a内不包括制动器和油封的无制动器和油封的电动机。因此,电动机21的壳体21a与在壳体内包括制动器、油封的带制动器和油封的电动机的壳体相比,轴向(x方向)的长度较小。电动机轴21b是电动机21的输出轴,构成为在沿着旋转轴线a2的延伸方向(x方向)的方向上延伸。电动机轴21b与减速器22直接连结。另外,电动机轴21b是要求保护的范围中的“第一电动机轴”的一例。
[0070]
减速器22与电动机21同轴地配置,并且与电动机21的电动机轴21b直接连结。减速器22是包括波发生器22a、柔性齿轮22b和刚性齿轮22c的波动齿轮减速器。波发生器22a是减速器22的输入部,通过将电动机轴21b插入于连结用的贯通孔122a而与电动机轴21b连结。柔性齿轮22b是减速器22的固定部,经由保持部件25安装于第一臂部1。刚性齿轮22c是减速器22的输出部,经由保持部件26与第二臂部2连结。另外,减速器22包括轴承部22d。轴承部22d将刚性齿轮22c以能够相对于柔性齿轮22b旋转的方式进行保持。轴承部22d是交叉滚子轴承。
[0071]
另外,波发生器22a具有在旋转中心具有电动机轴21b的插入用的贯通孔122a的椭圆型的圆盘形状。波发生器22a被压入到柔性齿轮22b的后述的圆筒部122b。柔性齿轮22b具有圆筒部122b和凸缘部122c。圆筒部122b构成为具有中空形状,并在沿着旋转轴线a2的延伸方向(x方向)的方向上延伸。圆筒部122b具有与刚性齿轮22c的内齿啮合的外齿。凸缘部122c构成为具有圆环形状,并从圆筒部122c的电动机21侧(x2方向侧)的端部向外侧(从旋转中心离开的一侧)延伸。刚性齿轮22c具有圆环形状,并且具有与柔性齿轮22b的外齿啮合
的内齿。
[0072]
作为减速器22的固定部的柔性齿轮22b在凸缘部122c通过未图示的螺钉等固定件而安装于保持部件25。保持部件25通过螺钉等固定件7c而安装于第一臂部1。另外,在作为减速器22的输出部的刚性齿轮22c设置有用于防止润滑脂泄漏的保持部件26。刚性齿轮22c经由保持部件26,通过未图示的螺钉等固定件而安装于第二臂部2。
[0073]
制动器23构成为保持电动机21。制动器23是在非通电时保持电动机21并且在通电时解除电动机21的保持的非励磁工作型的电磁制动器。制动器23的制动轮毂23a通过压入于电动机轴21b而安装于电动机轴21b的根部。制动器23的主体部23b通过螺钉等固定件7b而安装于保持部件25的制动器保持部25a。油封24构成为密封减速器22的润滑脂。油封24装配于电动机轴21b。另外,油封24被保持部件25的油封保持部25b保持。
[0074]
制动器23和油封24与电动机21分开地设置于电动机21的壳体21a外。制动器23和油封24在沿着旋转轴线a2的延伸方向(x方向)的方向上,配置在电动机21的壳体21a与减速器22的波发生器22a之间。制动器23和油封24相对于减速器22的波发生器22a配置于电动机21侧(x2方向侧)。制动器23和油封24从电动机21侧(x2方向侧)朝向减速器22侧(x1方向侧)依次配置。
[0075]
保持部件25构成为一体地保持电动机21、减速器22、制动器23和油封24。具体而言,电动机21通过未图示的螺钉等固定件而安装于保持部件25。另外,减速器22通过未图示的螺钉等固定件而安装于保持部件25。另外,制动器23通过螺钉等固定件7b而安装于保持部件25的制动器保持部25a。另外,油封24被保持部件25的油封保持部25b保持。第二关节轴部单元20a构成为,在一体地包括电动机21、减速器22、制动器23、油封24和保持部件25的状态下,通过螺钉等固定件7c,经由保持部件25安装于第一臂部1,并且经由保持部件26安装于第二臂部2。
[0076]
这里,减速器22具有在沿着旋转轴线a2的延伸方向(x方向)的方向上凹陷的凹部22e。凹部22e至少由波发生器22a、柔性齿轮22b、刚性齿轮22c和轴承部22d形成。具体而言,凹部22e的底部由波发生器22a形成。此外,凹部22e的侧部由柔性齿轮22b、刚性齿轮22c和轴承部22d形成。减速器22在电动机21侧(x2方向侧)具有凹部22e。即,凹部22e形成为从电动机21侧(x2方向侧)朝向减速器22侧(x1方向侧)凹陷。
[0077]
另外,制动器23的至少一部分(x1方向侧的部分)和油封24配置于凹部22e的内侧。即,制动器23的至少一部分和油封24以收纳于凹部22e的内侧的方式配置。由此,能够利用凹部22e来配置制动器23的至少一部分和油封24,因此与第二关节轴部单元20a使用带制动器的电动机的情况相比,能够使第二关节轴部单元20a在轴向(x方向)上小型化。制动器23的至少一部分和油封24配置成在沿着与旋转轴线a2的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部22e(柔性齿轮22b的圆筒部122b和轴承部22d)重叠。
[0078]
同样地,保持部件25的制动器保持部25a和油封保持部25b配置于凹部22e的内侧。即,制动器保持部25a和油封保持部25b以收纳于凹部22e的内侧的方式配置。制动器保持部25a和油封保持部25b配置成在沿着与旋转轴线a2的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部22e(柔性齿轮22b的圆筒部122b和轴承部22d)重叠。
[0079]
(第三关节轴部单元的结构)
[0080]
如图2、图7和图8所示,第三关节轴部单元30a是一体地包括第三关节轴部30的电
动机31、减速器32、制动器33、油封34和保持部件35的电动机单元。第三关节轴部单元30a构成为能够在一体地包括电动机31、减速器32、制动器33、油封34和保持部件35的状态下进行安装和拆卸。另外,电动机31和减速器32分别是要求保护的范围中的“第一电动机”和“第一减速器”的一例。
[0081]
电动机31构成为产生用于旋转驱动第三臂部3的驱动力。电动机31通过未图示的螺钉等固定件而安装于保持部件36。另外,电动机31经由保持部件36,通过螺钉等固定件7d而安装于保持部件35。另外,保持部件35安装于第三臂部3。另外,电动机31包括壳体31a和实心的电动机轴31b。壳体31a构成为收容定子、转子等。另一方面,壳体31a构成为不收容制动器和油封。即,电动机31是在壳体31a内不包括制动器和油封的无制动器和油封的电动机。因此,电动机31的壳体31a与在壳体内包括制动器、油封的带制动器和油封的电动机的壳体相比,轴向(x方向)的长度较小。电动机轴31b是电动机31的输出轴,构成为在沿着旋转轴线a3的延伸方向(x方向)的方向上延伸。电动机轴31b与减速器32直接连结。另外,电动机轴31b是要求保护的范围中的“第一电动机轴”的一例。
[0082]
减速器32与电动机31同轴地配置,并且与电动机31的电动机轴31b直接连结。减速器32是包括波发生器32a、柔性齿轮32b和刚性齿轮32c的波动齿轮减速器。波发生器32a是减速器32的输入部,通过将电动机轴31b插入于连结用的贯通孔132a而与电动机轴31b连结。柔性齿轮32b是减速器32的输出部,与第三臂部3连接。刚性齿轮32c是减速器32的固定部,安装于柔性齿轮32b。另外,减速器32包括轴承部32d。轴承部32d将柔性齿轮32b以能够相对于刚性齿轮32c旋转的方式进行保持。轴承部32c是交叉滚子轴承。
[0083]
另外,波发生器32a具有在旋转中心具有电动机轴31b的插入用的贯通孔132a的椭圆型的圆盘形状。波发生器32a被压入到柔性齿轮32b的后述的圆筒部132b。柔性齿轮32b具有圆筒部132b和凸缘部132c。圆筒部132b构成为具有中空形状,并在沿着旋转轴线a3的延伸方向(x方向)的方向上延伸。圆筒部132b具有与刚性齿轮32c的内齿啮合的外齿。凸缘部132c构成为具有圆环形状,并从圆筒部132b的电动机21侧(x2方向侧)的端部向外侧(从旋转中心离开的一侧)延伸。刚性齿轮32c具有圆环形状,并且具有与柔性齿轮32b的外齿啮合的内齿。
[0084]
作为减速器32的输出部的柔性齿轮32b在凸缘部132c,经由保持部件35,通过未图示的螺钉等固定件而安装于第三臂部3。另外,作为减速器32的固定部的刚性齿轮32c经由用于防止润滑脂泄漏的保持部件37,通过未图示的螺钉等固定件而安装于第二臂部2。
[0085]
制动器33构成为保持电动机31。制动器33是在非通电时保持电动机31并且在通电时解除电动机31的保持的非励磁工作型的电磁制动器。制动器33的制动轮毂33a通过紧定螺钉而安装于电动机轴31b的根部。制动器33的主体部33b通过未图示的螺钉等固定件而安装于保持部件35的制动器保持部35a。油封34构成为密封减速器32的润滑脂。油封34装配于电动机轴31b。另外,油封34被保持部件35的油封保持部35b保持。
[0086]
制动器33和油封34与电动机31分开地设置于电动机31的壳体31a外。制动器33和油封34在沿着旋转轴线a3的延伸方向(x方向)的方向上,配置在电动机31的壳体31a与减速器32的波发生器32a之间。制动器33和油封34相对于减速器32的波发生器32a配置于电动机31侧(x2方向侧)。制动器33和油封34从电动机31侧(x2方向侧)朝向减速器32侧(x1方向侧)依次配置。
[0087]
保持部件35构成为一体地保持电动机31、减速器32、制动器33和油封34。具体而言,电动机31经由保持部件36,通过螺钉等固定件7d而安装于保持部件35。另外,减速器32通过螺钉等固定件7e而安装于保持部件35。另外,制动器33通过未图示的螺钉等固定件而安装于保持部件35的制动器保持部35a。另外,油封34被保持部件35的油封保持部35b保持。第三关节轴部单元30a构成为,在一体地包括电动机31、减速器32、制动器33、油封34和保持部件35的状态下,通过未图示的螺钉等固定件,经由保持部件35安装于第三臂部3,并且经由保持部件37安装于第二臂部2。
[0088]
这里,减速器32具有在沿着旋转轴线a3的延伸方向(x方向)的方向上凹陷的凹部32e。凹部32e至少由波发生器32a、柔性齿轮32b、刚性齿轮32c和轴承部32d形成。具体而言,凹部32e的底部由波发生器32a形成。此外,凹部32e的侧部由柔性齿轮32b、刚性齿轮32c和轴承部32d形成。减速器32在电动机31侧(x2方向侧)具有凹部32e。即,凹部32e形成为从电动机31侧(x2方向侧)朝向减速器32侧(x1方向侧)凹陷。
[0089]
另外,制动器33的至少一部分(x1方向侧的部分)和油封34配置于凹部32e的内侧。即,制动器33的至少一部分和油封34以收纳于凹部32e的内侧的方式配置。由此,能够利用凹部32e来配置制动器33的至少一部分和油封34,因此与第三关节轴部单元30a使用带制动器的电动机的情况相比,能够使第三关节轴部单元30a在轴向(x方向)上小型化。制动器33的至少一部分和油封34配置成在沿着与旋转轴线a3的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部32e(柔性齿轮32b的圆筒部132b和轴承部32d)重叠。
[0090]
同样地,保持部件35的制动器保持部35a和油封保持部35b配置于凹部32e的内侧。即,制动器保持部35a和油封保持部35b以收纳于凹部32e的内侧的方式配置。制动器保持部35a和油封保持部35b配置成在沿着与旋转轴线a3的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部32e(柔性齿轮32b的圆筒部132b和轴承部32d)重叠。
[0091]
(第二关节轴部配线单元的结构)
[0092]
如图2、图9和图10所示,第二关节轴部配线单元70a构成为用于配置配线部8的第二部分8b。配线部8的第二部分8b的第一端与配线部8的第一部分8a(参照图4)连接,并且第二端与配线部8的后述的第三部分8c(参照图13)连接。配线部8的第二部分8b的第一端经由第二关节轴部配线单元70a的开口部71插入并配置到第一臂部1内。另外,配线部8的第二部分8b的第二端经由第二关节轴部配线单元70a的开口部72插入并配置到第三臂部3内。
[0093]
第二关节轴部配线单元70a一体地包括配线配置部73和保持配线配置部73的外装部74。配线配置部73构成为将配线部8的第二部分8b与外装部74区划而进行保持。配线配置部73为了抑制配线部8的第二部分8b的摩擦,由低摩擦的树脂材料构成。在配线配置部73中,配线部8的第二部分8b以沿着第二臂部2的延伸方向(z方向)延伸的方式配置。另外,在配线配置部73设置有夹紧部73a。夹紧部73a构成为将配线部8的第二部分8b固定地保持于配线配置部73。外装部74构成为形成第二关节轴部配线单元70a的外装部分。
[0094]
另外,在第一实施方式中,第二关节轴部配线单元70a构成为兼用作第二臂部2。具体而言,第二臂部2包括一对臂体2a和2b,该一对臂体2a和2b包括受到电动机21的驱动力的第一臂体2a和相对于第一臂体2a对向配置并且不受到电动机21的驱动力的第二臂体2b。第二关节轴部配线单元70a构成为兼用作一对臂体2a和2b中的第二臂体2b。第二关节轴部配线单元70a构成为外装部74兼用作第二臂体2b。外装部74具有将第一臂体2a与第二臂体2b
连结的连结部74a。第一臂体2a与第二臂体2b经由连结部74a相互连结。
[0095]
此外,在第二关节轴部配线单元70a以能够装卸的方式设置有罩70b。罩70b构成为,在从第二关节轴部配线单元70a拆下的情况下,使配线部8的第二部分8b露出于外部。另外,罩70b构成为,在安装到第二关节轴部配线单元70a的情况下,将配线部8的第二部分8b从外部区划而进行覆盖。
[0096]
(第四关节轴部单元的结构)
[0097]
如图2、图11和图12所示,第四关节轴部单元40a是一体地包括第四关节轴部40的电动机41、减速器42、配线配置部43和保持部件44的电动机单元。第四关节轴部单元40a构成为能够在一体地包括电动机41、减速器42、配线配置部43和保持部件44的状态下进行安装和拆卸。另外,电动机41和减速器42分别是要求保护的范围中的“第一电动机”和“第一减速器”的一例。
[0098]
电动机41构成为产生用于旋转驱动第四臂部4的驱动力。电动机41通过未图示的螺钉等固定件而安装于保持部件44。电动机41包括壳体41a和实心的电动机轴41b。壳体41a构成为收容定子、转子、制动器等。即,电动机41是在壳体41a内包括制动器的带制动器的电动机。电动机轴41b是电动机41的输出轴,构成为在沿着旋转轴线a4的延伸方向(y方向)的方向上延伸。电动机轴41b与减速器42直接连结。另外,电动机轴41b是要求保护的范围中的“第一电动机轴”的一例。
[0099]
减速器42与电动机41同轴地配置,并且与电动机41的电动机轴41b直接连结。减速器42是包括波发生器42a、柔性齿轮42b和刚性齿轮42c的波动齿轮减速器。波发生器42a是减速器42的输入部,通过将电动机轴41b插入于连结用的贯通孔142a而与电动机轴41b连结。柔性齿轮42b是减速器42的输出部,经由后述的轴承部42d的内圈与第四臂部4连结。刚性齿轮42c是减速器42的固定部,通过未图示的螺钉等固定件而安装于保持部件44。另外,减速器42包括轴承部42d。轴承部42d将柔性齿轮42b以能够相对于刚性齿轮42c旋转的方式进行保持。轴承部42d是交叉滚子轴承。
[0100]
另外,波发生器42a具有在旋转中心具有电动机轴41b的插入用的贯通孔442a的椭圆型的圆盘形状。波发生器42a被压入到柔性齿轮42b的后述的圆筒部142b。柔性齿轮42b具有杯形状,包括作为杯的侧部的圆筒部142b和杯的底部142c。圆筒部142b构成为具有中空形状,并在沿着旋转轴线a4的延伸方向(y方向)的方向上延伸。圆筒部142b具有与刚性齿轮42c的内齿啮合的外齿。底部142c构成为从圆筒部142b的与电动机41侧相反的一侧(y1方向侧)的端部向内侧(接近旋转中心的一侧)延伸。刚性齿轮42c具有圆环形状,并且具有与柔性齿轮42b的外齿啮合的内齿。
[0101]
作为减速器42的输出部的柔性齿轮42b在底部142c,通过未图示的螺钉等固定件,经由轴承部42d的内圈安装于第四臂部4。另外,作为减速器42的固定部的刚性齿轮42c通过未图示的螺钉等固定件而安装于保持部件44。
[0102]
配线配置部43构成为将配线部8的第三部分8c与第四臂部4区划而进行保持。配线部8的第三部分8c与配线部8的第二部分8b(参照图6等)连接。配线配置部43构成为固定侧部分。
[0103]
保持部件44构成为一体地保持电动机41、减速器42和配线配置部43。具体而言,电动机41通过未图示的螺钉等固定件而安装于保持部件44。另外,减速器42通过未图示的螺
钉等固定件而安装于保持部件44。另外,配线配置部43安装于保持部件44。第四关节轴部单元40a构成为,在一体地包括电动机41、减速器42、配线配置部43和保持部件44的状态下,通过未图示的螺钉等固定件,经由保持部件44安装于第三臂部3。
[0104]
另外,如图2所示,在第三臂部3以能够装卸的方式设置有配线保养用罩30b。配线保养用罩30b构成为,在从第三臂部3拆下的情况下,使配线部8的第二部分8b和第三部分8c、电动机31、电动机41等露出于外部。由此,能够容易地进行配线部8的第二部分8b与第三部分8c的配线连接作业、配线部8与电动机31和电动机41的配线连接作业等配线作业。
[0105]
(第四关节轴部配线单元的结构)
[0106]
如图2、图12及图13所示,第四关节轴部配线单元80a构成为用于配置配线部8的第三部分8c。配线部8的第三部分8c的第一端配置于第五、六关节轴部单元50a,并且第二端与配线部8的第二部分8b(参照图6等)连接。配线部8的第三部分8c的第一端经由第四关节轴部配线单元80a的开口部81及副臂部80b(在图13中省略图示)插入并配置到第五、六关节轴部单元50a内。另外,配线部8的第三部分8c的第二端经由第四关节轴部配线单元80a的开口部82插入并配置到第三臂部3内。
[0107]
第四关节轴部配线单元80a一体地包括配线配置部83和保持配线配置部83的外装部84。配线配置部83构成为将配线部8的第三部分8c与外装部84区划而进行保持。配线配置部83为了抑制配线部8的第三部分8c的摩擦,由低摩擦的树脂材料构成。配线配置部83构成为与第四关节轴部单元40a的配线配置部43一起配置配线部8的第三部分8c。在配线配置部83和配线配置部43中,配线部8的第三部分8c以具有折回部分的方式配置。具体而言,在配线配置部83和配线配置部43中,配线部8的第三部分8c在从x方向观察时配置成u字状。另外,配线配置部83和配线配置部43分别构成为可动侧部分和固定侧部分。作为可动侧部分的配线配置部83相对于作为固定侧部分的配线配置部43配置于前端侧(y1方向侧),并构成为能够对应于第四臂部4的绕旋转轴线a4的旋转而移动。作为固定侧部分的配线配置部43相对于作为可动侧部分的配线配置部83配置于与前端侧相反的一侧(y2方向侧),并以不动的方式固定于第四关节轴部单元40a的保持部件44。外装部84构成为形成第四关节轴部配线单元80a的外装部分。
[0108]
另外,在第一实施方式中,第四关节轴部配线单元80a构成为兼用作第四臂部4。具体而言,第四关节轴部配线单元80a构成为外装部84兼用作第四臂部4。外装部84具有:收容部84a,收容配线配置部83;及保持部84b,以从收容部84a朝向前端侧(y1方向侧)延伸的方式设置,并将第五、六关节轴部单元50a以能够旋转的方式进行保持。
[0109]
另外,如图2所示,在第四关节轴部配线单元80a和第五、六关节轴部单元50a,以能够装卸的方式设置有副臂部80b和罩80c。副臂部80b形成为第四臂部4的x2方向侧的臂体。罩80c构成为,在从第四关节轴部配线单元80a拆下的情况下,使配线部8的第三部分8c露出于外部。另外,罩80c构成为,在安装到第四关节轴部配线单元80a的情况下,将配线部8的第三部分8c从外部区划而进行覆盖。
[0110]
(第五、六关节轴部单元的结构)
[0111]
如图2和图14~图16所示,与手腕构造对应的第五关节轴部50和第六关节轴部60构成为,形成一体地包括第五关节轴部50、第六关节轴部60、第五臂部5和第六臂部6的第五、六关节轴部单元50a。第五、六关节轴部单元50a构成为能够在一体地包括第五关节轴部
50、第六关节轴部60、第五臂部5和第六臂部6的状态下进行安装和拆卸。
[0112]
第五关节轴部50包括电动机51、减速器52、制动器53和油封54。另外,电动机51和减速器52分别是要求保护的范围中的“第三电动机”和“第三减速器”的一例。
[0113]
电动机51构成为产生用于旋转驱动第五臂部5的驱动力。电动机51通过未图示的螺钉等固定件而安装于第五臂部5。电动机51包括壳体51a和实心的电动机轴51b。壳体51a构成为收容定子、转子等。另一方面,壳体51a构成为不收容制动器和油封。即,电动机51是在壳体51a内不包括制动器和油封的无制动器和油封的电动机。因此,电动机51的壳体51a与在壳体内包括制动器、油封的带制动器和油封的电动机的壳体相比,轴向(x方向)的长度较小。电动机轴51b是电动机51的输出轴,构成为在沿着旋转轴线a5的延伸方向(x方向)的方向上延伸。电动机轴51b与减速器52直接连结。另外,电动机轴51b是要求保护的范围中的“第三电动机轴”的一例。
[0114]
减速器52与电动机51同轴地配置,并且与电动机51的电动机轴51b直接连结。减速器52是包括波发生器52a、柔性齿轮52b和刚性齿轮52c的波动齿轮减速器。波发生器52a是减速器52的输入部,通过将电动机轴51b插入于连结用的贯通孔152a而与电动机轴51b连结。柔性齿轮52b是减速器52的输出部,与第五臂部5连接。刚性齿轮52c是减速器52的固定部,安装于第四臂部4。另外,减速器52包括轴承部52d。轴承部52d将柔性齿轮52b以能够相对于刚性齿轮52c旋转的方式进行保持。轴承部52d是交叉滚子轴承。
[0115]
另外,波发生器52a具有在旋转中心具有电动机轴51b的插入用的贯通孔152a的椭圆型的圆盘形状。波发生器52a被压入到柔性齿轮52b的后述的圆筒部152b。柔性齿轮52b具有圆筒部152b和凸缘部152c。圆筒部152b构成为具有中空形状,并在沿着旋转轴线a5的延伸方向(x方向)的方向上延伸。圆筒部152b具有与刚性齿轮52c的内齿啮合的外齿。凸缘部152c构成为具有圆环形状,并从圆筒部152b的电动机51侧(x2方向侧)的端部向外侧(从旋转中心离开的一侧)延伸。刚性齿轮52c具有圆环形状,并且具有与柔性齿轮52b的外齿啮合的内齿。
[0116]
作为减速器52的输出部的柔性齿轮52b在凸缘部152c通过未图示的螺钉等固定件而安装于第五臂部5。另外,作为减速器52的固定部的刚性齿轮52c通过螺钉等固定件7f而安装于第四臂部4。
[0117]
制动器53构成为保持电动机51。制动器53是在非通电时保持电动机51并且在通电时解除电动机51的保持的非励磁工作型的电磁制动器。制动器53的制动轮毂53a通过紧定螺钉而安装于电动机轴51b的中央部。制动器53的主体部53b通过未图示的螺钉等固定件而安装于第五臂部5的制动器保持部5a。油封54构成为密封减速器52的润滑脂。油封54装配于电动机轴51b。另外,油封54被与第四臂部4和第五臂部5分开设置的油封保持部9保持。
[0118]
制动器53和油封54与电动机51分开地设置于电动机51的壳体51a外。制动器53和油封54在沿着旋转轴线a5的延伸方向(x方向)的方向上,配置在电动机51的壳体51a与减速器52的波发生器52a之间。制动器53和油封54相对于减速器52的波发生器52a配置于电动机51侧(x2方向侧)。制动器53和油封54从电动机51侧(x2方向侧)朝向减速器52侧(x1方向侧)依次配置。
[0119]
这里,减速器52具有在沿着旋转轴线a5的延伸方向(x方向)的方向上凹陷的凹部52e。凹部52e至少由波发生器52a、柔性齿轮52b、刚性齿轮52c和轴承部52d形成。具体而言,
凹部52e的底部由波发生器52a形成。此外,凹部52e的侧部由柔性齿轮52b、刚性齿轮52c和轴承部52d形成。减速器52在电动机51侧(x2方向侧)具有凹部52e。即,凹部52e形成为从电动机51侧(x2方向侧)朝向减速器52侧(x1方向侧)凹陷。
[0120]
另外,制动器53的至少一部分(x1方向侧的部分)和油封54配置于凹部52e的内侧。即,制动器53的至少一部分和油封54以收纳于凹部52e的内侧的方式配置。由此,能够利用凹部52e来配置制动器53的至少一部分和油封54,因此与第五关节轴部50使用带制动器的电动机的情况相比,能够使第五、六关节轴部单元50a在轴向(x方向)上小型化。制动器53的至少一部分和油封54配置成在沿着与旋转轴线a5的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部52e(柔性齿轮52b的圆筒部152b、刚性齿轮52c和轴承部52d)重叠。
[0121]
同样地,油封保持部9也配置于凹部52e的内侧。即,油封保持部9也以收纳于凹部52e的内侧的方式配置。油封9也配置成在沿着与旋转轴线a5的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部52e(柔性齿轮52b的圆筒部152b、刚性齿轮52c和轴承部52d)重叠。
[0122]
第六关节轴部60包括电动机61、减速器62、制动器63和带机构64。另外,电动机61和减速器62分别是要求保护的范围中的“第二电动机”和“第二减速器”的一例。
[0123]
电动机61构成为产生用于旋转驱动作为工具凸缘的第六臂部6的驱动力。电动机61通过未图示的螺钉等固定件而安装于第五臂部5。电动机61包括壳体61a和实心的电动机轴61b。壳体61a构成为收容定子、转子等。另一方面,壳体61a构成为不收容制动器。即,电动机61是在壳体61a内不包括制动器的无制动器的电动机。因此,电动机61的壳体61a与在壳体内包括制动器的带制动器的电动机的壳体相比,轴向(y方向)的长度较小。电动机轴61b是电动机61的输出轴,构成为在沿着旋转轴线a6的延伸方向(y方向)的方向上延伸。电动机轴61b经由带机构64与减速器62连结。另外,电动机轴61b是要求保护的范围中的“第二电动机轴”的一例。
[0124]
减速器62以轴不与电动机61重叠的方式配置,并且经由带机构64与电动机61的电动机轴61b连结。减速器62是包括波发生器62a、柔性齿轮62b和刚性齿轮62c的波动齿轮减速器。波发生器62a是减速器62的输入部,通过将输入轴162a与带机构64的后述的带轮64b连结,由此经由带机构64与电动机轴61b连结。柔性齿轮62b是减速器62的输出部,与第六臂部6连接。刚性齿轮62c是减速器62的固定部,安装于第五臂部5。另外,减速器62包括轴承部62d。轴承部62d将柔性齿轮62b以能够相对于刚性齿轮62c旋转的方式进行保持。轴承部62d是交叉滚子轴承。
[0125]
另外,波发生器62a具有输入轴162a和圆盘部162b。波发生器62a的圆盘部162b被压入到柔性齿轮62b的后述的圆筒部162c。柔性齿轮62b具有杯形状,包括作为杯的侧部的圆筒部162c和杯的底部162d。圆筒部162c构成为具有中空形状,并在沿着旋转轴线a6的延伸方向(y方向)的方向上延伸。圆筒部162c具有与刚性齿轮62c的内齿啮合的外齿。底部162d构成为从圆筒部162c的与电动机61侧相反的一侧(y1方向侧)的端部向内侧(接近旋转中心的一侧)延伸。刚性齿轮62c具有圆环形状,并且具有与柔性齿轮62b的外齿啮合的内齿。
[0126]
作为减速器62的输出部的柔性齿轮62b在底部162d,通过螺钉等固定件7g而安装于第六臂部6。另外,作为减速器62的固定部的刚性齿轮62c通过未图示的螺钉等固定件而
安装于第五臂部5。
[0127]
制动器63构成为保持电动机61。制动器63是在非通电时保持电动机61并且在通电时解除电动机61的保持的非励磁工作型的电磁制动器。制动器63与电动机61分开地设置于电动机61的壳体61a外。制动器63和电动机61隔着电动机51相互对向地配置。
[0128]
带机构64构成为将由电动机61产生的驱动力传递给减速器62。另外,带机构64构成为将由制动器63产生的保持力传递给电动机61。带机构64包括多个(三个)带轮64a~64c和多个(两个)带64d和64e。带轮64a通过螺钉等固定件7h而安装于电动机轴61b。带轮64b通过螺钉等固定件7i而安装于波发生器62a的输入轴162a。带轮64c通过螺钉等固定件7j而安装于制动器63的输入轴63a。带64d架设在带轮64a与带轮64b之间。带64e架设在带轮64b与带轮64c之间。带机构64的至少一部分(带轮64b、带64d、带64e等)配置在减速器62与电动机51之间。另外,带机构64的y方向的大小比电动机61的y方向的大小小。
[0129]
第五、六关节轴部单元50a构成为一体地包括第五关节轴部50的电动机51、减速器52、制动器53和油封54、第六关节轴部60的电动机61、减速器62、制动器63和带机构64、油封保持部9、第五臂部5、及第六臂部6。另外,第五、六关节轴部单元50a构成为能够在一体地包括第五关节轴部50的电动机51、减速器52、制动器53和油封54、第六关节轴部60的电动机61、减速器62、制动器63和带机构64、油封保持部9、第五臂部5、第六臂部6的状态下进行安装和拆卸。
[0130]
(垂直多关节机器人的组装)
[0131]
接着,参照图2对垂直多关节型机器人100的组装方法的一例进行说明。如图2所示,首先,在第一关节轴部单元10a的第一臂部1安装第二关节轴部单元20a。然后,在安装到第一关节轴部单元10a的第一臂部1的第二关节轴部单元20a安装第二臂部2的第一臂体2a。然后,在第三臂部3安装第三关节轴部单元30a。然后,将安装到第三臂部3的第三关节轴部单元30a安装于安装到第二关节轴部单元20a的第二臂部2的第一臂体2a。然后,在第一关节轴部单元10a的第一臂部1和第三臂部3安装作为第二臂部2的第二臂体2b的第二关节轴部配线单元70a。然后,在第二关节轴部配线单元70a安装罩70b。
[0132]
然后,在第三臂部3安装第四关节轴部单元40a。然后,在安装到第三臂部3的第四关节轴部单元40a安装第四关节轴部配线单元80a。然后,在安装到第四关节轴部单元40a的第四关节轴部配线单元80a安装第五、六关节轴部单元50a。然后,在第四关节轴部配线单元80a和第五、六关节轴部单元50a安装副臂部80b和罩80c。由此,进行垂直多关节机器人100的组装。
[0133]
另外,在垂直多关节机器人100的组装过程中,适当地进行配线部8的配线作业。具体而言,在拆下带配线连接器的罩10c的状态下,进行配线部8的第一部分8a与电动机11的配线连接作业、配线部8的第一部分8a与连接器10d的配线连接作业等。另外,在拆下配线保养用罩10e的状态下,进行配线部8的第一部分8a与第二部分8b的配线连接作业、配线部8与电动机21的配线连接作业等。另外,在拆下配线保养用罩30b的状态下,进行配线部8的第二部分8b与第三部分8c的配线连接作业、配线部8与电动机31和电动机41的配线连接作业等。另外,在拆下罩80c的状态下,进行配线部8的第三部分8c与电动机51和电动机61的配线连接作业等。在配线连接作业完成后,安装各罩。
[0134]
(第一实施方式的效果)
[0135]
在第一实施方式中,能够得到如下的效果。
[0136]
在第一实施方式中,如上所述,设置配线单元70a和80a,并且将关节轴部单元10a(20a、30a、40a、50a)构成为一体地包括:电动机11(21、31、41、51),包括实心的电动机轴11b(21b、31b、41b、51b);及减速器12(22、32、42、52),与电动机轴11b(21b、31b、41b、51b)直接连结。由此,与将配线插通于电动机轴的中空部的情况相比,能够使电动机11(21、31、41、51)和减速器12(22、32、42、52)小型化,因此能够与将电动机11(21、31、41、51)和减速器12(22、32、42、52)小型化的量相应地,使关节轴部单元10a(20a、30a、40a、50a)小型化。另外,与将配线插通于电动机轴的中空部的情况相比,能够减少关节轴部单元10a(20a、30a、40a、50a)的输入部的绕旋转轴线的惯性(惯性矩),因此能够与将关节轴部单元10a(20a、30a、40a、50a)的输入部的绕旋转轴线的惯性减少的量相应地,提高关节轴部单元10a(20a、30a、40a、50a)的转速和旋转加速度。上述的结果是,能够使关节轴部单元10a(20a、30a、40a、50a)小型化,并且提高关节轴部单元10a(20a、30a、40a、50a)的转速和旋转加速度。
[0137]
另外,在第一实施方式中,如上所述,设置多个关节轴部单元10a~50a、及配线单元70a和80a。由此,能够以单元为单位进行垂直多关节机器人100的组装和保养(单元的更换等),因此能够容易地进行垂直多关节机器人100的组装和保养。
[0138]
另外,在第一实施方式中,如上所述,将第五、六关节轴部单元50a构成为一体地包括供工具6a安装的第六关节轴部60和连接到第六关节轴部60的与前端侧相反的一侧的第五关节轴部50的单元。由此,能够一体地处理第六关节轴部60和第五关节轴部50这两个关节轴部,因此与不能一体地处理第六关节轴部60和第五关节轴部50的情况相比,能够容易地进行第六关节轴部60和第五关节轴部50的组装和保养。其结果是,能够更容易地进行垂直多关节机器人100的组装和保养。
[0139]
另外,在第一实施方式中,如上所述,将第六关节轴部60构成为包括:电动机61,包括电动机轴61b;及减速器62,经由带机构64与电动机轴61b连结。另外,将第五关节轴部50构成为包括:电动机51,包括实心的电动机轴51b;及减速器52,与电动机轴51b直接连结。另外,将第五、六关节轴部单元50a构成为一体地包括电动机61、带机构64、减速器62、电动机51和减速器52。由此,能够一体地处理第六关节轴部60的电动机61、带机构64和减速器62、及第五关节轴部50的电动机51和减速器52,因此能够容易地进行第六关节轴部60的电动机61、带机构64和减速器62、及第五关节轴部50的电动机51和减速器52的组装和保养。另外,即使在设置需要进行带的张力的调整的带机构64的情况下,也能够将使用中的第五、六关节轴部单元50a更换为包括对带的张力进行了调整的状态的带机构64的第五、六关节轴部单元50a,因此不需要进行更换时的带机构64的带的张力的调整。其结果是,与在更换时进行带机构64的带的张力的调整的情况相比,能够容易地进行包括带机构64的第五、六关节轴部单元50a的更换。
[0140]
另外,在第一实施方式中,如上所述,将配线单元70a(80a)构成为兼用作臂部2(4)。由此,能够兼用配线单元70a(80a)和臂部2(4),因此与将配线单元70a(80a)与臂部2(4)分开地设置的情况相比,能够简化用于配线单元70a(80a)的构造。其结果是,即使在设置配线单元70a(80a)的情况下,也能够抑制构造的复杂化和元件数量的增加。
[0141]
另外,在第一实施方式中,如上所述,将配线单元70a(80a)构成为一体地包括配线配置部73(83)和保持配线配置部73(83)并且兼用作臂部2(4)的外装部74(84)。由此,能够
在配线配置部73(83)可靠地配置配线部8,并且能够通过兼用作臂部2(4)的外装部74(84)来抑制构造的复杂化和元件数量的增加。
[0142]
另外,在第一实施方式中,如上所述,将臂部2构成为包括一对臂体2a和2b,该一对臂体2a和2b包括受到电动机21的驱动力的第一臂体2a和相对于第一臂体2a对向配置并且不受到电动机21的驱动力的第二臂体2b。另外,将配线单元70a构成为兼用作一对臂体2a和2b中的第二臂体2b。由此,能够兼用不直接受到电动机21的驱动力的第二臂体2b和配线单元70a,因此与兼用受到电动机21的驱动力的第一臂体2a和配线单元70a的情况相比,即使在配线单元70a兼用作臂部2的情况下,也能够有效地抑制兼用作臂部2的配线单元70a的构造的复杂化。
[0143]
另外,在第一实施方式中,如上所述,将关节轴部单元20a(30a、50a)构成为一体地包括:电动机21(31、51),是不包括制动器的电动机;减速器22(32、52);及制动器23(33、53),相对于减速器22(32、52)配置于电动机21(31、51)侧,用于保持电动机21(31、51)。由此,与电动机21(31、51)为带制动器的电动机的情况相比,能够使电动机21(31、51)小型化。另外,由于能够将制动器23(33、53)配置于电动机21(31、51)侧,因此能够将制动器23(33、53)配置于尽可能接近电动机21(31、51)的位置。其结果是,能够稳定地进行制动器23(33、53)对电动机21(31、51)的保持。
[0144]
[第二实施方式]
[0145]
接着,参照图17~图22对第二实施方式进行说明。在该第二实施方式中,与对第二关节轴部单元和第三关节轴部单元的制动器相对于减速器配置于电动机侧的例子进行说明的上述第一实施方式不同,对第二关节轴部单元和第三关节轴部单元的制动器相对于减速器配置于与电动机侧相反的一侧的例子进行说明。另外,对于与上述第一实施方式相同的结构,在图中标注相同的标号来进行图示,并省略其说明。
[0146]
(垂直多关节机器人的结构)
[0147]
如图17所示,第二实施方式的垂直多关节机器人200在具备第二臂部202、第二关节轴部单元220a和第三关节轴部单元330a这一点上与上述第一实施方式的垂直多关节机器人100不同。另外,第二关节轴部单元320a和第三关节轴部单元330a是要求保护的范围中的“关节轴部单元”的一例。
[0148]
(第二关节轴部单元的结构)
[0149]
如图17~图19所示,第二关节轴部单元220a是一体地包括第二关节轴部220的电动机221、减速器222、制动器223、油封224、保持部件225和226的电动机单元。第二关节轴部单元220a构成为能够在一体地包括电动机221、减速器222、制动器223、油封224和保持部件225及226的状态下进行安装和拆卸。另外,电动机221和减速器222分别是要求保护的范围中的“第一电动机”和“第一减速器”的一例。
[0150]
电动机221构成为产生用于旋转驱动第二臂部202的驱动力。电动机221包括壳体221a和实心的电动机轴221b。壳体221a构成为收容定子、转子等。另一方面,壳体221a构成为不收容制动器和油封。即,电动机221是在壳体221a内不包括制动器和油封的无制动器和油封的电动机。因此,电动机221的壳体221a与在壳体内包括制动器、油封的带制动器和油封的电动机的壳体相比,轴向(x方向)的长度较小。电动机轴221b是电动机221的输出轴,构成为在沿着旋转轴线a2的延伸方向(x方向)的方向上延伸。电动机轴221b与减速器222直接
连结。另外,电动机轴221b是要求保护的范围中的“第一电动机轴”的一例。
[0151]
减速器222与电动机221同轴地配置,并且与电动机221的电动机轴221b直接连结。减速器222是包括波发生器222a、柔性齿轮222b和刚性齿轮222c的波动齿轮减速器。波发生器222a是减速器222的输入部,通过将电动机轴221b插入于连结用的贯通孔322a而与电动机轴221b连结。柔性齿轮222b是减速器222的输出部,经由保持部件226与第二臂部202连结。刚性齿轮222c是减速器222的固定部,经由保持部件225安装于第一臂部1。另外,减速器222包括轴承部222d。轴承部222d将柔性齿轮222b以能够相对于刚性齿轮222c旋转的方式进行保持。轴承部222d是交叉滚子轴承。
[0152]
另外,波发生器222a具有在旋转中心具有电动机轴221b的插入用的贯通孔322a的椭圆型的圆盘形状。波发生器222a被压入到柔性齿轮222b的后述的圆筒部322b。柔性齿轮222b具有圆筒部322b和凸缘部322c。圆筒部322b构成为具有中空形状,并在沿着旋转轴线a2的延伸方向(x方向)的方向上延伸。圆筒部322b具有与刚性齿轮222c的内齿啮合的外齿。凸缘部322c构成为具有圆环形状,并从圆筒部322b的电动机221侧(x2方向侧)的端部向外侧(从旋转中心离开的一侧)延伸。刚性齿轮222c具有圆环形状,并且具有与柔性齿轮222b的外齿啮合的内齿。
[0153]
作为减速器222的输出部的柔性齿轮222b在凸缘部322c通过未图示的螺钉等固定件而安装于保持部件226。另外,柔性齿轮222b经由保持部件226,通过未图示的固定件而安装于第二臂部202。另外,作为减速器222的固定部的刚性齿轮222c通过未图示的螺钉等固定件,经由保持部件225安装于第一臂部1。
[0154]
制动器223构成为保持电动机221。制动器223是在非通电时保持电动机221并且在通电时解除电动机221的保持的非励磁工作型的电磁制动器。制动器223的制动轮毂223a通过键和紧定螺钉而固定于电动机轴221b,由此安装于电动机轴221b的前端部。制动器223的主体部223b通过未图示的螺钉等固定件而安装于保持部件226的制动器保持部226a。油封224构成为密封减速器222的润滑脂。油封224装配于电动机轴221b。另外,油封224被保持部件226的油封保持部226b保持。
[0155]
制动器223和油封224与电动机221分开地设置于电动机221的壳体221a外。制动器223和油封224在沿着旋转轴线a2的延伸方向(x方向)的方向上,配置于电动机221的壳体221a和减速器222的波发生器222a的外侧。制动器223和油封224相对于减速器222的波发生器222a配置于与电动机221侧相反的一侧(x1方向侧)。油封224和制动器223从电动机221侧(x2方向侧)朝向减速器222侧(x1方向侧)依次配置。
[0156]
保持部件225和226构成为一体地保持电动机221、减速器222、制动器223和油封224。具体而言,电动机221通过未图示的螺钉等固定件而安装于保持部件225。另外,减速器222通过螺钉等固定件207a而安装于保持部件225。另外,制动器223通过未图示的螺钉等固定件而安装于保持部件226的制动器保持部226a。另外,油封224被保持部件226的油封保持部226b保持。第二关节轴部单元220a在一体地包括电动机221、减速器222、制动器223、油封224、保持部件225和226的状态下,通过未图示的螺钉等固定件,经由保持部件225安装于第一臂部1,并且经由保持部件226安装于第二臂部202。
[0157]
这里,减速器222具有在沿着旋转轴线a2的延伸方向(x方向)的方向上凹陷的凹部222e。凹部222e至少由波发生器222a、柔性齿轮222b、刚性齿轮222c和轴承部222d形成。具
体而言,凹部222e的底部由波发生器222a形成。此外,凹部222e的侧部由柔性齿轮222b、刚性齿轮222c和轴承部222d形成。减速器222在与电动机221侧相反的一侧(x1方向侧)具有凹部222e。即,凹部222e形成为从减速器222侧(x1方向侧)朝向电动机221侧(x2方向侧)凹陷。
[0158]
另外,制动器223的至少一部分(x2方向侧的部分)和油封224配置于凹部222e的内侧。即,制动器223的至少一部分和油封224以收纳于凹部222e的内侧的方式配置。由此,能够利用凹部222e来配置制动器223的至少一部分和油封224,因此与第二关节轴部单元220a使用带制动器的电动机的情况相比,能够使第二关节轴部单元220a在轴向(x方向)上小型化。制动器223的至少一部分和油封224配置成在沿着与旋转轴线a2的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部222e(柔性齿轮222b的圆筒部322b和轴承部222d)重叠。
[0159]
同样地,保持部件226的制动器保持部226a和油封保持部226b配置于凹部222e的内侧。即,制动器保持部226a和油封保持部226b以收纳于凹部222e的内侧的方式配置。制动器保持部226a和油封保持部226b配置成在沿着与旋转轴线a2的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部222e(柔性齿轮222b的圆筒部322b和轴承部222d)重叠。
[0160]
另外,在第二实施方式中,第二臂部202的第一臂体202a在与制动器223对向的位置具有制动器保养用罩202b。制动器保养用罩202b以能够装卸的方式设置于第二臂部202的第一臂体202a。制动器保养用罩202b构成为,在从第二臂部202的第一臂体202a拆下的情况下,使制动器223与制动器223的固定件等一起露出于外部。由此,能够容易地进行制动器223的更换等制动器223的保养。另外,制动器保养用罩202b构成为,在安装到第二臂部202的第一臂体202a的情况下,覆盖制动器223。制动器223配置于第二臂部202的第一臂体202a的外表面的附近。
[0161]
(第三关节轴部单元的结构)
[0162]
如图17、图20和图21所示,第三关节轴部单元230a是一体地包括第二关节轴部220的电动机231、减速器232、制动器233、油封234、保持部件235和236的电动机单元。第三关节轴部单元230a构成为能够在一体地包括电动机231、减速器232、制动器233、油封234和保持部件235及236的状态下进行安装和拆卸。另外,电动机231和减速器232分别是要求保护的范围中的“第一电动机”和“第一减速器”的一例。
[0163]
电动机231构成为产生用于旋转驱动第三臂部3的驱动力。电动机231包括壳体231a和实心的电动机轴231b。壳体231a构成为收容定子、转子等。另一方面,壳体231a构成为不收容制动器和油封。即,电动机231是在壳体231a内不包括制动器和油封的无制动器和油封的电动机。因此,电动机231的壳体231a与在壳体内包括制动器、油封的带制动器和油封的电动机的壳体相比,轴向(x方向)的长度较小。电动机轴231b是电动机231的输出轴,构成为在沿着旋转轴线a3的延伸方向(x方向)的方向上延伸。电动机轴231b与减速器232直接连结。另外,电动机轴231b是要求保护的范围中的“第一电动机轴”的一例。
[0164]
减速器232与电动机231同轴地配置,并且与电动机231的电动机轴231b直接连结。减速器232是包括波发生器232a、柔性齿轮232b和刚性齿轮232c的波动齿轮减速器。波发生器232a是减速器232的输入部,通过将电动机轴231b插入于连结用的贯通孔332a而与电动机轴231b连结。柔性齿轮232b是减速器232的固定部,经由保持部件236安装于第二臂部
202。刚性齿轮232c是减速器232的输出部,经由保持部件235与第三臂部3连结。另外,减速器232包括轴承部232d。轴承部232d将刚性齿轮232c以能够相对于柔性齿轮232b旋转的方式进行保持。轴承部232d是交叉滚子轴承。
[0165]
另外,波发生器232a具有在旋转中心具有电动机轴231b的插入用的贯通孔332a的椭圆型的圆盘形状。波发生器232a通过被压入到柔性齿轮232b的后述的圆筒部332b而安装于柔性齿轮232b。柔性齿轮232b具有圆筒部332b和凸缘部332c。圆筒部332b构成为具有中空形状,并在沿着旋转轴线a3的延伸方向(x方向)的方向上延伸。圆筒部332b具有与刚性齿轮232c的内齿啮合的外齿。凸缘部332c构成为具有圆环形状,并从圆筒部332b的电动机231侧(x2方向侧)的端部向外侧(远离旋转中心的一侧)延伸。刚性齿轮232c具有圆环形状,并且具有与柔性齿轮232b的外齿啮合的内齿。
[0166]
作为减速器232的固定部的柔性齿轮232b在凸缘部332c,通过未图示的螺钉等固定件,经由保持部件236安装于第二臂部202。另外,作为减速器232的输出部的刚性齿轮232c通过未图示的螺钉等固定件,经由保持部件235安装于第三臂部3。
[0167]
制动器233构成为保持电动机231。制动器233是在非通电时保持电动机231并且在通电时解除电动机231的保持的非励磁工作型的电磁制动器。制动器233的制动轮毂233a通过利用紧定螺钉固定于电动机轴231b,由此安装于电动机轴231b的前端部。制动器233的主体部233b通过未图示的螺钉等固定件而安装于保持部件236的制动器保持部236a。油封234构成为密封减速器232的润滑脂。油封234装配于电动机轴231b。另外,油封234被保持部件236的油封保持部236b保持。
[0168]
制动器233和油封234与电动机231分开地设置于电动机231的壳体231a外。制动器233和油封234在沿着旋转轴线a3的延伸方向(x方向)的方向上,配置于电动机231的壳体231a和减速器232的波发生器232a的外侧。制动器233和油封234相对于减速器232的波发生器232a配置于与电动机231侧相反的一侧(x1方向侧)。油封234和制动器233从电动机231侧(x2方向侧)朝向减速器232侧(x1方向侧)依次配置。
[0169]
保持部件235和236构成为一体地保持电动机231、减速器232、制动器233和油封234。具体而言,电动机231通过未图示的螺钉等固定件而安装于保持部件235。另外,减速器232通过螺钉等固定件207b而安装于保持部件235。另外,制动器233通过未图示的螺钉等固定件而安装于保持部件236的制动器保持部236a。另外,油封234被保持部件236的油封保持部236b保持。第三关节轴部单元230a构成为在一体地包括电动机231、减速器232、制动器233、油封234、保持部件235和236的状态下,通过未图示的螺钉等固定件,经由保持部件235安装于第三臂部3,并且经由保持部件236安装于第二臂部202。
[0170]
这里,减速器232具有在沿着旋转轴线a3的延伸方向(x方向)的方向上凹陷的凹部232e。凹部232e至少由波发生器232a、柔性齿轮232b、刚性齿轮232c和轴承部232d形成。具体而言,凹部232e的底部由波发生器232a形成。此外,凹部232e的侧部由柔性齿轮232b、刚性齿轮232c和轴承部232d形成。减速器232在与电动机231侧相反的一侧(x1方向侧)具有凹部232e。即,凹部232e形成为从减速器232侧(x1方向侧)朝向电动机231侧(x2方向侧)凹陷。
[0171]
另外,制动器233的至少一部分(x2方向侧的部分)和油封234配置于凹部232e的内侧。即,制动器233的至少一部分和油封234以收纳于凹部232e的内侧的方式配置。由此,能够利用凹部232e来配置制动器233的至少一部分和油封234,因此与第三关节轴部单元230a
使用带制动器的电动机的情况相比,能够使第三关节轴部单元230a在轴向(x方向)上小型化。制动器233的至少一部分和油封234配置成在沿着与旋转轴线a3的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部232e(柔性齿轮232b的圆筒部332b和轴承部232d)重叠。
[0172]
同样地,保持部件236的制动器保持部236a和油封保持部236b配置于凹部232e的内侧。即,制动器保持部236a和油封保持部236b以收纳于凹部232e的内侧的方式配置。制动器保持部236a和油封保持部236b配置成在沿着与旋转轴线a3的延伸方向正交的方向(y方向、z方向等)的方向上观察时,与凹部232e(柔性齿轮232b的圆筒部332b和轴承部232d)重叠。
[0173]
另外,在第二实施方式中,第二臂部202的第一臂体202a在与制动器233对向的位置具有制动器保养用罩202c。制动器保养用罩202c以能够装卸的方式设置于第二臂部202的第一臂体202a。制动器保养用罩202c构成为,在从第二臂部202的第一臂体202a拆下的情况下,使制动器233与制动器233的固定件等一起露出于外部。由此,能够容易地进行制动器233的更换等制动器233的保养。另外,制动器保养用罩202c构成为,在安装到第二臂部202的第一臂体202a的情况下,覆盖制动器233。制动器233配置于第二臂部202的第一臂体202a的外表面的附近。
[0174]
(第二臂部的结构)
[0175]
另外,在第二实施方式中,如图17及图22所示,第二臂部202的第一臂体202a具有将第一臂体202a与第二臂体2b连结的连结部202d。连结部202d具有中空构造,构成为能够将制动器223的制动线223c和制动器233的制动线233c插通于中空部。制动线223c和制动线233c构成为,经由连结部202d的中空部配置于第二关节轴部配线单元70a。
[0176]
第二臂部202的第一臂体202a在与连结部202d对向的位置具有制动线保养用罩202e。制动线保养用罩202e以能够装卸的方式设置于第二臂部202的第一臂体202a。制动线保养用罩202e构成为,在从第二臂部202的第一臂体202a拆下的情况下,使制动线223c和233c露出于外部。由此,能够容易地进行制动线223c和233c的保养。另外,制动线保养用罩202e构成为,在安装到第二臂部202的第一臂体202a的情况下,覆盖制动线223c和233c。制动线223c和233c配置于第二臂部202的第一臂体202a的外表面附近。
[0177]
另外,第二实施方式的其他结构与上述第一实施方式相同。
[0178]
(第二实施方式的效果)
[0179]
在第二实施方式中,能够得到如下的效果。
[0180]
在第二实施方式中,如上述那样构成。由此,与上述第一实施方式同样地,能够使关节轴部单元10a(220a、230a、40a、50a)小型化,并且提高关节轴部单元10a(220a、230a、40a、50a)的转速和旋转加速度。
[0181]
另外,在第二实施方式中,如上所述,关节轴部单元220a(230a)一体地包括:电动机221(231),是不包括制动器的电动机;减速器222(232);及制动器223(233),相对于减速器222(232)配置于与电动机221(231)侧相反的一侧,用于保持电动机221(231)。如果这样构成,则与电动机221(231)为带制动器的电动机的情况相比,能够使电动机221(231)小型化。另外,由于能够将制动器223(233)配置于与电动机221(231)侧相反的一侧,因此能够将制动器223(233)配置于尽可能接近臂部202的表面的位置。其结果是,能够将制动器223
(233)配置于容易进行制动器的更换等针对制动器的保养作业的位置。
[0182]
另外,第二实施方式的其他效果与上述第一实施方式相同。
[0183]
[变形例]
[0184]
另外,应当认为本次公开的实施方式在所有方面均是例示,而不是限制性的。本发明的范围并不是由上述的实施方式的说明示出,而是由要求保护的范围示出,而且包括与要求保护的范围等同的含义和范围内的所有改变(变形例)。
[0185]
例如,在上述第一和第二实施方式中,示出了垂直多关节机器人是具有六个自由度的六轴机器人的例子,但本发明并不限于此。在本发明中,可以是具有五个以下的自由度的机器人,也可以是具有七个以上的自由度的机器人。
[0186]
另外,在上述第一和第二实施方式中,示出了第五关节轴部(前端前关节轴部)和第六关节轴部(前端关节轴部)形成为一体地包括第五关节轴部和第六关节轴部的单元的例子,但本发明并不限于此。在本发明中,前端前关节轴部和前端关节轴部也可以形成为独立的单元。
[0187]
另外,在上述第一和第二实施方式中,示出了第六关节轴部(前端关节轴部)包括电动机和经由带机构与电动机的电动机轴连结的减速器的例子,但本发明并不限于此。在本发明中,前端关节轴部也可以包括电动机和与电动机的电动机轴直接连结的减速器。
[0188]
另外,在上述第一和第二实施方式中,示出了第二关节轴部配线单元和第四关节轴部配线单元构成为兼用作臂部的例子,但本发明并不限于此。在本发明中,配线单元也可以与臂部分开地设置。
[0189]
另外,在上述第一和第二实施方式中,示出了第二臂部包括第一臂体和第二臂体这一对臂体的例子,但本发明并不限于此。在本发明中,第二臂部也可以由单个臂体构成。
[0190]
标号说明
[0191]
1 第一臂部(臂部)
[0192]
2、202 第二臂部(臂部)
[0193]
2a、202a 第一臂体
[0194]
2b 第二臂体
[0195]
3 第三臂部(臂部)
[0196]
4 第四臂部(臂部)
[0197]
5 第五臂部(臂部)
[0198]
6 第六臂部(臂部)
[0199]
6a 工具
[0200]
8 配线部
[0201]
8a 第一部分(配线部)
[0202]
8b 第二部分(配线部)
[0203]
8c 第三部分(配线部)
[0204]
10a 第一关节轴部单元(关节轴部单元)
[0205]
11、21、31、41、221、231 电动机(第一电动机)
[0206]
11b、21b、31b、41b、221b、231b 电动机轴(第一电动机轴)
[0207]
12、22、32、42、222、232 减速器(第一减速器)
[0208]
20a、220a 第二关节轴部单元(关节轴部单元)
[0209]
23、33、223、233 制动器
[0210]
30a、230a 第三关节轴部单元(关节轴部单元)
[0211]
40a 第四关节轴部单元(关节轴部单元)
[0212]
50 第五关节轴部(前端前关节轴部)
[0213]
50a 第五、六关节轴部单元(关节轴部单元、前端关节轴部单元)
[0214]
51 电动机(第三电动机)
[0215]
51b 电动机轴(第三电动机轴)
[0216]
52 减速器(第三减速器)
[0217]
60 第六关节轴部(前端关节轴部)
[0218]
61 电动机(第二电动机)
[0219]
61b 电动机轴(第二电动机轴)
[0220]
62 减速器(第二减速器)
[0221]
64 带机构
[0222]
70a 第二关节轴部配线单元(配线单元)
[0223]
73、83 配线配置部
[0224]
74、84 外装部
[0225]
80a 第四关节轴部配线单元(配线单元)
[0226]
100、200 垂直多关节机器人
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。