1.本技术涉及机械领域,尤其涉及一种吸取装置及吸取方法。
背景技术:
2.在一些技术领域,经常需要对物品进行数据采集,对于一些较为脆弱的待数据采集物,在对其进行拾取操作过程中,这些物品在操作过程中容易受损。
3.例如,在文物保护过程中,经常需要对文物进行表面数据采集。相关技术中,一般由操作人员采用人工的方式拾取文物进行数据采集,由于文物一般较为脆弱,在拾取文物的过程中,文物容易受损。
技术实现要素:
4.本技术实施例提供了一种吸取装置及吸取方法,以解决采用人工的方式对待数据采集物进行拾取等操作时容易使得待数据采集物受损的问题。
5.第一方面,本技术实施例提供了一种吸取装置。
6.本技术实施例提供的吸取装置可包括:第一机械手、第二机械手、第一静电吸附器和第二静电吸附器;所述第一静电吸附器设置在所述第一机械手上,所述第二静电吸附器设置在所述第二机械手上;所述第一机械手用于带动所述第一静电吸附器进行移动;所述第二机械手用于带动所述第二静电吸附器进行移动;所述第一静电吸附器与所述第二静电吸附器中的其中至少一者可翻转;所述第一静电吸附器能够与所述第二静电吸附器处于相对的位置。
7.可选地,所述吸取装置还包括:操作平台;所述操作平台上设置有待处理物设置区和数据采集区,所述待处理物设置区用于放置待数据采集物,所述第一静电吸附器用于从所述待处理物设置区吸取所述待数据采集物,所述第一静电吸附器还用于将吸取的所述待数据采集物放置至所述数据采集区进行数据采集。
8.可选地,所述待数据采集物包括贝叶经。
9.可选地,所述第一静电吸附器可翻转;所述第一静电吸附器还用于从所述数据采集区吸取已进行数据采集的所述待数据采集物,所述第一静电吸附器进行翻转时,所述第一静电吸附器带动吸取的已进行数据采集的所述待数据采集物进行翻转;所述第一静电吸附器移动至与所述第二静电吸附器相对的位置,或,所述第二静电吸附器移动至与所述第一静电吸附器相对的位置;所述第一静电吸附器还用于释放吸取的已进行数据采集的所述待数据采集物,所述第二静电吸附器用于吸取所述第一静电吸附器释放的所述待数据采集物;所述第二静电吸附器还用于将经翻转的所述待数据采集物放置至所述数据采集区。
10.可选地,所述吸取装置还包括:支架和机械手固定杆;所述支架与所述机械手固定杆连接,所述支架用于支撑所述机械手固定杆,所述第一机械手和所述第二机械手均设置在所述机械手固定杆上;所述第一机械手包括第一驱动器、第二驱动器和第三驱动器,所述第一驱动器用于驱动所述第一机械手在所述机械手固定杆上移动,所述第二驱动器用于驱
动所述第一静电吸附器朝靠近或远离所述操作平台的方向进行移动,所述第三驱动器用于驱动所述第一静电吸附器进行翻转;所述第二机械手包括第四驱动器和第五驱动器,所述第四驱动器用于驱动所述第二机械手在所述机械手固定杆上移动,所述第五驱动器用于驱动所述第二静电吸附器朝靠近或远离所述操作平台的方向进行移动。
11.可选地,所述吸取装置还包括控制器,所述控制器分别与所述第一驱动器、第二驱动器、第三驱动器、第四驱动器、第五驱动器、第一静电吸附器和第二静电吸附器电连接。
12.可选地,所述第二静电吸附器可翻转;所述第一静电吸附器还用于从所述数据采集区吸取已进行数据采集的所述待数据采集物;所述第一静电吸附器移动至与所述第二静电吸附器相对的位置,或,所述第二静电吸附器移动至与所述第一静电吸附器相对的位置;所述第一静电吸附器还用于释放吸取的已进行数据采集的所述待数据采集物,所述第二静电吸附器用于吸取所述第一静电吸附器释放的所述待数据采集物;所述第二静电吸附器进行翻转,所述第二静电吸附器带动吸取的已进行数据采集的所述待数据采集物进行翻转;所述第二静电吸附器还用于将经翻转的所述待数据采集物放置至所述数据采集区。
13.可选地,所述吸取装置还包括:支架和机械手固定杆;所述支架与所述机械手固定杆连接,所述支架用于支撑所述机械手固定杆,所述第一机械手和所述第二机械手均设置在所述机械手固定杆上;所述第一机械手包括第一驱动器、第二驱动器,所述第一驱动器用于驱动所述机械手在所述机械手固定杆上移动,所述第二驱动器用于驱动所述第一静电吸附器朝靠近或远离所述操作平台的方向进行移动;所述第二机械手包括第四驱动器、第五驱动器和第六驱动器,所述第四驱动器用于驱动所述第二机械手在所述机械手固定杆上移动,所述第五驱动器用于驱动所述第二静电吸附器朝靠近或远离所述操作平台的方向进行移动;所述第六驱动器用于驱动所述第二静电吸附器进行翻转。
14.可选地,所述第一静电吸附器包括吸盘外壳、柔性吸盘和静电发生器,所述柔性吸盘和所述静电发生器均设置在所述吸盘外壳上,所述柔性吸盘包括所述柔性缓冲垫、柔性电极和绝缘层,所述柔性缓冲垫、柔性电极和绝缘层依次层叠,所述柔性缓冲垫设置在所述吸盘外壳上,所述绝缘层暴露在所述第一静电吸附器的外部;所述第二静电吸附器的构造与所述第一静电吸附器的构造一致;所述第一静电吸附器还包括电池仓,所述电池仓用于设置电池,所述电池用于对所述第一静电吸附器进行供电;所述第一静电吸附器与所述第一机械手可拆卸连接,所述吸盘外壳上设置有把手。
15.第二方面,本技术实施例提供了一种吸取方法。
16.本技术实施例提供的吸取方法,可用于进行如第一方面所提供的任意一种吸取装置,所述吸取方法可包括:利用所述第一机械手带动所述第一静电吸附器移动至待处理物设置区;利用所述第一静电吸附器从所述待处理物设置区吸取待数据采集物;利用所述第一机械手带动所述第一静电吸附器移动至数据采集区,使得所述第一静电吸附器释放吸取的所述待数据采集物;在对所述待数据采集物的表面进行数据采集后,利用所述第一静电吸附器从所述数据采集区吸取已进行数据采集的所述待数据采集物;利用所述第一静电吸附器与所述第二静电吸附器中可翻转的一者带动所述待数据采集物进行翻转;利用所述第二静电吸附器将经翻转的所述待数据采集物放置至所述数据采集区。
17.本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
18.在本技术的实施例中,可以通过第一静电吸附器对待数据采集物进行吸附,可以
利用第一机械手带动第一静电吸附器进行移动,可以将第一静电吸附器吸附的待数据采集物放置到数据采集区,以对待数据采集物的第一面进行处理。可以利用第一静电吸附器与第二静电吸附器中可翻转的一者带动被吸附的待数据采集物进行翻转,可以利用第二静电吸附器将经翻转的待数据采集物放置到数据采集区,以对待数据采集物的第二面进行处理。这样,可以利用第一静电吸附器和第二静电吸附器对待数据采集物进行翻转和移动,可以改善人工对待数据采集物进行操作使得待数据采集物受损的问题。
附图说明
19.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
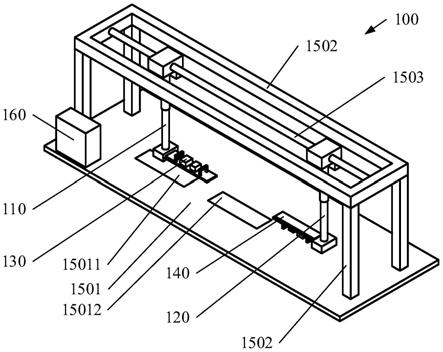
20.图1为本技术实施例提供的第一种吸取装置的示意图。
21.图2为本技术实施例提供的一种第一静电吸附器示意图。
22.图3为本技术实施例提供的一种柔性吸盘示意图。
23.图4为本技术实施例提供的第二种吸取装置的示意图。
24.图5为本技术实施例提供的第二种吸取装置中第一静电吸附器与第二静电吸附器相对的示意图。
25.图6为本技术实施例提供的第三种吸取装置的示意图。
26.图7为本技术实施例提供的第三种吸取装置中第一静电吸附器与第二静电吸附器相对的示意图。
27.图8为本技术实施例提供的一种吸取方法的流程图。
28.附图标记说明:100-吸取装置;110-第一机械手;1101-第一驱动器;1102-第二驱动器;1103-第三驱动器;120-第二机械手;1201-第四驱动器;1202-第五驱动器;1203-第六驱动器;130-第一静电吸附器;1301-吸盘外壳;1302-静电发生器;1303-柔性吸盘;13031-柔性缓冲垫;13032-柔性电极;13033-绝缘层;1304-电池仓;140-第二静电吸附器;1501-操作平台;15011-待处理物设置区;15012-数据采集区;1502-支架;1503-机械手固定杆;160-控制器;170-待数据采集物。
具体实施方式
29.为了使本技术领域的人员更好地理解本技术中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
30.以下结合附图,详细说明本技术各实施例提供的技术方案。
31.参考图1,本技术实施例提供的吸取装置100可包括:第一机械手110、第二机械手120、第一静电吸附器130和第二静电吸附器140。第一静电吸附器130可设置在第一机械手110上,第二静电吸附器140可设置在第二机械手120上;第一机械手110可用于带动第一静
电吸附器130进行移动;第二机械手120可用于带动第二静电吸附器140进行移动;第一静电吸附器130与第二静电吸附器140中的其中至少一者可翻转;第一静电吸附器130能够与第二静电吸附器140处于相对的位置。
32.以此方式,在本技术的实施例中,可以通过第一静电吸附器130对待数据采集物进行吸附,可以利用第一机械手110带动第一静电吸附器130进行移动,可以将第一静电吸附器130吸附的待数据采集物放置到数据采集区,以对待数据采集物的第一面进行处理。可以利用第一静电吸附器130与第二静电吸附器140中可翻转的一者带动被吸附的待数据采集物进行翻转,可以利用第二静电吸附器140将经翻转的待数据采集物放置到数据采集区,以对待数据采集物的第二面进行处理。这样,可以利用第一静电吸附器130和第二静电吸附器140对待数据采集物进行翻转和移动,可以改善人工对待数据采集物进行操作使得待数据采集物受损的问题。
33.在本技术的实施例中,待数据采集物可为片状物品,例如片状文物。示例性地,待数据采集物可以包括贝叶经、片状丝绸、纸质古书籍等。
34.这里需说明的是,贝叶经是写在贝树叶子上的经文,贝叶经具有极高的文物价值,素有“佛教熊猫”之称。中国西藏是当今世界保存贝叶经最多、最丰富的地方,迄今保存有梵文、藏文和巴利文等贝叶经古写本,其中有不少属孤本、善本、珍本。在对贝叶经进行保护处理过程中,一般由操作人员使用a4纸张从整叠贝叶经上铲取单张贝叶经,并将揭取的贝叶经放置到数据采集区对贝叶经进行数据采集,在完成单面的数据采集后,再利用a4纸对贝叶经进行翻转,将翻转的贝叶经再放置到数据采集区对贝叶经的另一面进行数据采集。这样,在翻转的过程中,a4纸张与贝叶经本体接触摩擦,容易对贝叶经造成损伤。而采用本技术实施例提供的吸取装置100,可以利用第一静电吸附器130和第二静电吸附器140对贝叶经进行移动和翻转,可以改善贝叶经在数据采集过程中容易受损的问题。还需说明的是,本技术实施例提供的吸取装置100也可以吸取其他与贝叶经类似的待数据采集物,这里不一一展开说明。
35.可选地,参考图2至图3,在本技术的实施例中,第一静电吸附器130可包括吸盘外壳1301、柔性吸盘1303和静电发生器1302,柔性吸盘1303和静电发生器1302均可设置在吸盘外壳1301上,柔性吸盘1303可包括柔性缓冲垫13031、柔性电极13032和绝缘层13033,柔性缓冲垫13031、柔性电极13032和绝缘层13033可依次层叠,柔性缓冲垫13031可设置在吸盘外壳1301上,绝缘层13033可暴露在第一静电吸附器130的外部。可以利用柔性吸盘1303中包括的绝缘层13033吸附待数据采集物170。需说明的是,在本技术的实施例中,第二静电吸附器140的构造可以与第一静电吸附器130的构造一致。当然,在本技术的其它实施例中,第二静电吸附器140也可以为与第一静电吸附器130的构造不同的静电吸附器,而只需第二静电吸附器140可能通过静电吸附的方式吸取待数据采集物170。
36.需说明的是,这里给出的第一静电吸附器130仅作为一种示例,在本技术的其它实施例中,还可以采用其它结构的静电吸附器作为第一静电吸附器130。随着技术的发展,还会有其它结构的静电吸附器出现,也可以采用未来出现的其它结构的静电吸附器作为第一静电吸附器130。
37.第一静电吸附器130还可包括电池仓1304,电池仓1304中可设置有电池,可以利用电池仓1304中设置的电池对第一静电吸附器130进行供电。第一静电吸附器130可与第一机
械手110可拆卸连接,吸盘外壳1301上设置有把手。这样,可以通过将第一静电吸附器130拆卸下来的方式,人工利用第一静电吸附器130对待数据采集物170进行转移。当然,在本技术的其它实施例中,也可以通过供电电源对第一静电吸附器130和第二静电吸附器140进行供电,例如通过电连接至电网的供电线路对第一静电吸附器130和第二静电吸附器140进行供电。
38.参考图1,可选地,在本技术的实施例中,吸取装置100还可包括:操作平台1501。操作平台1501上可设置有待处理物设置区15011和数据采集区15012,待处理物设置区15011可用于放置待数据采集物,第一静电吸附器130可用于从待处理物设置区15011吸取待数据采集物,第一静电吸附器130还可用于将吸取的待数据采集物放置至数据采集区15012进行数据采集。示例性地,数据采集区15012可以设置有数据采集装置,可以利用数据采集装置对设置在数据采集区15012的待数据采集物进行数据采集处理。
39.需说明的是,在本技术的其它实施例中,可以吸取装置100可以不包括操作平台,可以开发专用的操作平台作为吸取装置100的配套设备。此外,在本技术的实施例中,吸取装置100还可用于吸取待数据采集物进行其它处理操作,例如,可以吸取待数据采集物进行修护、清洁等操作。
40.可选地,参考图4至图5,在本技术的实施例中,第一静电吸附器130可翻转。第一静电吸附器130还可用于从数据采集区15012吸取已进行数据采集的待数据采集物,第一静电吸附器130进行翻转时,第一静电吸附器130可带动吸取的已进行数据采集的待数据采集物进行翻转。第一静电吸附器130可移动至与第二静电吸附器140相对的位置,或,第二静电吸附器140可移动至与第一静电吸附器130相对的位置。第一静电吸附器130还可用于释放吸取的已进行数据采集的待数据采集物,第二静电吸附器140可用于吸取第一静电吸附器130释放的待数据采集物。第二静电吸附器140还可用于将经翻转的待数据采集物放置至数据采集区15012。
41.这样,在数据采集区15012完成对待数据采集物的第一面数据采集处理后,可以利用第一静电吸附器130从数据采集区15012吸取已进行第一面处理的待数据采集物,可以利用第一机械手110带动第一静电吸附器130进行翻转,从而带动吸取的待数据采集物进行翻转。可以利用第一机械手110带动第一静电吸附器130移动至与第二静电吸附器140相对的位置,例如,可以将第一静电吸附器130移动至第二静电吸附器140的下方,使得第一静电吸附器130的静电吸附面与第二静电吸附器140的静电吸附面相对。第一静电吸附器130可以释放吸取的待数据采集物,第二静电吸附器140可以吸取第一静电吸附器130释放的待数据采集物。第二静电吸附器140可以将吸取的经翻转的待数据采集物放置至数据采集区15012。后续可以在数据采集区15012对待数据采集物的第二面进行处理。
42.需说明的是,在本技术的实施例中,对待数据采集物的第一面进行处理的数据采集区15012可以与对待数据采集物的第二面进行处理的数据采集区15012不同。例如,数据采集区15012可以包括两个,可以在第一个数据采集区15012对待数据采集物的第一面进行处理,可以在第二个数据采集区15012对待数据采集物的第二面进行处理。以后不再一一说明。
43.可选地,参考图1,吸取装置100还可包括:支架1502和机械手固定杆1503。支架1502可与机械手固定杆1503连接,支架1502可用于支撑机械手固定杆1503;第一机械手110
和第二机械手120均可设置在机械手固定杆1503上。可选地,机械手固定杆1503可以为丝杆,当然,机械手固定杆1503也可以为其它结构,只需使得机械手可以在其上移动即可。需说明的是,虽然图1示出了第一机械手110和第二机械手120均设置在一根机械手固定杆1503上的情形,容易得出的,第一机械手110和第二机械手120也可以分别设置在不同的机械手固定杆1503上。
44.可选地,在本技术的其它实施例中,可以设置与手臂类似可通过旋转关节的转动带动设置在其上的静电吸附器进行移动的机械手。这样,在本技术的其它实施例中,可以直接将第一机械手和第二机械手设置在安装架上,可以不设置支架1502和机械手固定杆1503等结构。
45.可选地,参考图4,第一机械手110可包括第一驱动器1101、第二驱动器1102和第三驱动器1103,第一驱动器1101可用于驱动第一机械手110在机械手固定杆1503上移动,第二驱动器1102可用于驱动第一静电吸附器130朝靠近或远离操作平台1501的方向进行移动,第三驱动器1103可用于驱动第一静电吸附器130进行翻转。第二机械手120可包括第四驱动器1201和第五驱动器1202,第四驱动器1201可用于驱动第二机械手120在机械手固定杆1503上移动,第五驱动器1202可用于驱动第二静电吸附器140朝靠近或远离操作平台1501的方向进行移动。可选地,各驱动器均可以为电动机,具体可以选用伺服电机。当然,在本技术的其它实施例中,各驱动器可以分别为液压缸或液压马达、气缸或气马达等,这里不一一列举。
46.需说明的是,在本技术的其它实施例中,可以设置与手臂类似,可通过旋转关节的转动带动设置在其上的静电吸附器进行移动的机械手。即,在本技术的其它实施例中,第一机械手和第二机械手可以为与手臂类似,可通过旋转关节的转动带动设置在其上的静电吸附器进行移动的机械手。以后不再一一说明。
47.吸取装置100还可包括控制器160,控制器160分别与第一驱动器1101、第二驱动器1102、第三驱动器1103、第四驱动器1201、第五驱动器1202、第一静电吸附器130和第二静电吸附器140电连接。这样,可以通过控制器160控制与之电连接的各部件的工作状态。可选地,控制器160可以设置在操作平台1501上,当然,控制器160也可以设置在其它位置,这里不一一列举。
48.可选地,参考图6至图7,在本技术的其它实施例中,第二静电吸附器140可翻转。第一静电吸附器130还可用于从数据采集区15012吸取已进行数据采集的待数据采集物170;第一静电吸附器130可移动至与第二静电吸附器140相对的位置,或,第二静电吸附器140可移动至与第一静电吸附器130相对的位置。第一静电吸附器130还可用于释放吸取的已进行数据采集的待数据采集物170,第二静电吸附器140可用于吸取第一静电吸附器130释放的待数据采集物170;第二静电吸附器140可进行翻转,第二静电吸附器140可带动吸取的已进行数据采集的待数据采集物170进行翻转;第二静电吸附器140还可用于将经翻转的待数据采集物170放置至数据采集区15012。
49.这样,在数据采集区15012对待数据采集物的第一面处理完毕后,可以利用第一静电吸附器130从数据采集区15012吸取已进行第一面处理的待数据采集物。可以利用第二机械手120带动第二静电吸附器140移动至与第一静电吸附器130相对的位置,例如,可以将第二静电吸附器140移动至第一静电吸附器130的下方,使得第二静电吸附器140的静电吸附
面与第一静电吸附器130的静电吸附面相对。第一静电吸附器130可以释放吸取的待数据采集物,第二静电吸附器140可以吸取第一静电吸附器130释放的待数据采集物。第二静电吸附器140可以对吸取待数据采集物进行翻转,第二静电吸附器140可以将经翻转的待数据采集物放置至数据采集区15012。后续可以在数据采集区15012对待数据采集物的第二面进行处理。
50.可选地,参考图6,第一机械手110可包括第一驱动器1101、第二驱动器1102,第一驱动器1101可用于驱动机械手在机械手固定杆1503上移动,第二驱动器1102可用于驱动第一静电吸附器130朝靠近或远离操作平台1501的方向进行移动。第二机械手120可包括第四驱动器1201、第五驱动器1202和第六驱动器1203。第四驱动器1201可用于驱动第二机械手120在机械手固定杆1503上移动,第五驱动器1202可用于驱动第二静电吸附器140朝靠近或远离操作平台1501的方向进行移动;第六驱动器1203可用于驱动第二静电吸附器140进行翻转。可选地,各驱动器均可以为电动机,具体可以选用伺服电机。当然,在本技术的其它实施例中,各驱动器可以分别为液压缸或液压马达、气缸或气马达等,这里不一一列举。
51.可选地,吸取装置100还可包括控制器160,控制器160分别与第一驱动器1101、第二驱动器1102、第四驱动器1201、第五驱动器1202、第六驱动器1203、第一静电吸附器130和第二静电吸附器140电连接。这样,可以通过控制器160控制与之电连接的各部件的工作状态。可选地,控制器160可以设置在操作平台1501上,当然,控制器160也可以设置在其它位置,这里不一一列举。
52.可选地,在本技术的其它实施例中,第一静电吸附器130和第二静电吸附器140均可以进行翻转,这样,当其中一个静电吸附器故障后,可以利用另外一个静电吸附器对待数据采集物进行翻转。
53.以此方式,在本技术的实施例中,可以通过第一静电吸附器130对待数据采集物进行吸附,可以利用第一机械手110带动第一静电吸附器130进行移动,可以将第一静电吸附器130吸附的待数据采集物放置到数据采集区,以对待数据采集物的第一面进行处理。可以利用第一静电吸附器130与第二静电吸附器140中可翻转的一者带动被吸附的待数据采集物进行翻转,可以利用第二静电吸附器140将经翻转的待数据采集物放置到数据采集区,以对待数据采集物的第二面进行处理。这样,可以利用第一静电吸附器130和第二静电吸附器140对待数据采集物进行翻转和移动,可以改善人工对待数据采集物进行操作使得待数据采集物受损的问题。
54.参考图8,本技术实施例提供了一种吸取方法,可应用于如前文所提供的任一种吸取装置100,该方法可包括:步骤210,利用第一机械手110带动第一静电吸附器130移动至待处理物设置区。步骤220,利用第一静电吸附器130从待处理物设置区吸取待数据采集物。步骤230,利用第一机械手110带动第一静电吸附器130移动至数据采集区,使得第一静电吸附器130释放吸取的待数据采集物。步骤240,在对待数据采集物的表面进行数据采集后,利用第一静电吸附器130从数据采集区15012吸取已进行数据采集的待数据采集物。步骤250,利用第一静电吸附器130与第二静电吸附器140中可翻转的一者带动待数据采集物进行翻转。步骤260,利用第二静电吸附器140将经翻转的待数据采集物放置至数据采集区15012。
55.以此方式,在本技术的实施例中,可以通过第一静电吸附器130对待数据采集物170进行吸附,可以利用第一机械手110带动第一静电吸附器130进行移动,将第一静电吸附
器130吸附的待数据采集物170放置到数据采集区15012,以对待数据采集物170的第一面进行处理。可以利用第一静电吸附器130与第二静电吸附器140中可翻转的一者带动待数据采集物170进行翻转,可以利用第二静电吸附器140将经翻转的待数据采集物170放置到数据采集区15012,以对待数据采集物170的第二面进行处理。需说明的是,以上步骤仅为所描述的一个实施例,在本技术的其它实施例中,可以调换各步骤的顺序。
56.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
57.尽管已经示出和描述了本技术的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本技术实施例的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术实施例的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
