1.本公开涉及医疗用机器人、操作器械以及安装部。
背景技术:
2.近年来,为了减轻手术人员的负担和实现医疗设施的节约人力化而提出了使用机器人进行医疗处理的方案。在外科领域,提出了一种有关使用多自由度机械手对患者实施治疗处理的医疗用机器人的方案,其中,多自由度机械手具有可供手术人员远程操作的多自由度臂(例如参照专利文献1)。
3.在专利文献1记载的技术中,公开了用于医疗处理的操作器械能够相对于医疗用机器人进行安装和拆卸的结构。此外,从医疗用机器人向操作器械传递对操作器械的可动部进行驱动的驱动力。该驱动力的传递路径也具有能够对应于操作器械的安装和拆卸而卡合和脱离的结构。
4.如专利文献1记载的医疗用机器人,通常情况下,从医疗用机器人拆卸操作器械的路径与安装操作器械时的路径是相同的。即,通过在安装时的路径上反向行进便可实施操作器械的拆卸。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利第5283241号
技术实现要素:
8.发明要解决的问题
9.然而,有可能因医疗用机器人的结构而导致当包含多自由度臂的医疗用机器人采取规定的位姿时,用于安装和拆卸操作器械的路径与医疗用机器人之间产生干扰。例如,在医疗用机器人紧急停止的情况下等,如果在医疗用机器人不可动时安装和拆卸路径与医疗用机器人之间产生了干扰,则存在无法从医疗用机器人拆卸操作器械,或者难以进行拆卸的问题。
10.本公开希望提供能够易于实施操作器械的拆卸的医疗用机器人、操作器械以及安装部。
11.解决问题的方法
12.本公开第一个方案的医疗用机器人具有:操作器械,操作器械具有主体,主体至少设置有处理部和从动部,处理部实施医疗处理,从动部向该处理部传递驱动力;以及安装部,安装部至少包括传递部和安装面,传递部通过与所述从动部卡合而传递驱动力,所述传递部露出在安装面上,并且安装面是与所述主体相对的面,在所述操作器械设置有操作器械卡合部,在所述安装部设置有安装卡合部,所述操作器械卡合部以及安装卡合部构造成,通过所述操作器械以及所述安装部在沿着所述安装面的方向上进行相对移动,而相对于所述安装部安装所述操作器械,并且通过所述操作器械以及所述安装部在与所述安装面相交
的方向上进行相对移动,而使所述操作器械从所述安装部脱离。
13.本公开第二个方案的操作器械能够相对于安装部进行安装和拆卸,其中,安装部至少包括传递部和安装面,传递部通过与从动部卡合而传递驱动力,所述传递部露出在安装面上,并且安装面是与所述主体相对的面,该操作器械具有:主体,主体至少设置有处理部和从动部,处理部实施医疗处理,从动部向该处理部传递驱动力;以及操作器械卡合部,操作器械卡合部构造成能够与设置在所述安装部的安装卡合部卡合,且能够从所述安装卡合部脱离,通过所述操作器械以及所述安装部在沿着所述安装面的方向上进行相对移动,而相对于所述安装部安装所述操作器械,并且通过所述操作器械以及所述安装部在与所述安装面相交的方向上进行相对移动,而使所述操作器械从所述安装部脱离。
14.本公开第三个方案的安装部供操作器械进行安装和拆卸,其中,操作器械具有主体,主体至少设置有处理部和从动部,处理部实施医疗处理,从动部向该处理部传递驱动力,该安装部包括:传递部,传递部通过与所述从动部卡合而传递驱动力;安装面,所述传递部露出在安装面上,并且安装面是与所述主体相对的面;以及安装卡合部,安装卡合部构造成能够与设置在所述操作器械的操作器械卡合部卡合,且能够从所述操作器械卡合部脱离,通过所述操作器械以及所述安装部在沿着所述安装面的方向上进行相对移动,而相对于所述安装部安装所述操作器械,并且通过所述操作器械以及所述安装部在与所述安装面相交的方向上进行相对移动,而使所述操作器械从所述安装部脱离。
15.根据上述结构,在操作器械设置有操作器械卡合部,在安装部设置有安装卡合部,因此,通过操作器械以及安装部在沿着安装面的方向上进行相对移动,而相对于安装部安装操作器械,并且通过操作器械以及安装部在与安装面相交的方向上进行相对移动,而使操作器械从安装部脱离。
16.在上述公开的第一方案中,优选在所述操作器械设置有操作器械限制部,优选在所述安装部设置有安装限制部,操作器械限制部以及安装限制部构造成,将所述操作器械和所述安装部在沿着所述安装面的方向上的相对位置限制在预定的位置处,并且容许所述操作器械和所述安装部在与所述安装面相交的方向上进行相对移动。
17.根据上述结构,通过设置操作器械限制部以及安装限制部,而将已安装的操作器械在沿着安装面的方向上的相对于安装部的相对位置限制在预定的位置处,此外,容许所述操作器械和所述安装部在与安装面相交的方向上进行相对移动,因此,在使操作器械脱离安装部时,操作器械限制部和安装限制部不易产生干扰。
18.在上述公开的第一方案中,优选在所述安装面设置有通道部,在使所述操作器械从所述安装部脱离时,通道部形成供离开所述安装卡合部的所述操作器械卡合部经由的空间。
19.根据上述结构,通过设置通道部,在使操作器械从所述安装部脱离时,操作器械卡合部与安装面不易产生干扰。此外,能够使操作器械卡合部朝安装面进行相对移动,从而易于解除操作器械卡合部与安装卡合部之间的卡合。
20.发明的效果
21.根据本公开第一方案的医疗用机器人、第二方案的操作器械以及第三方案的安装部,在操作器械设置有操作器械卡合部,在安装部设置有安装卡合部,因此,使操作器械安装到安装部时的路径不同于使操作器械从安装部脱离时的路径。例如在医疗用机器人紧急
停止的情况下,即使进行安装时的路径与机器人的臂等产生干扰时,也可实现易于进行操作器械拆卸的效果。
附图说明
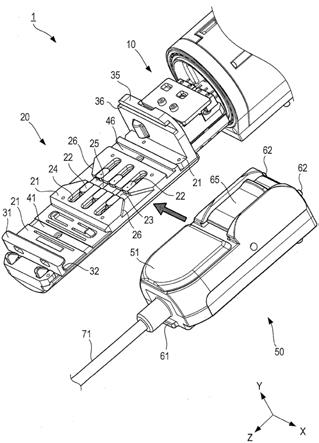
22.图1是对本公开的一个实施方式的医疗用机器人的结构进行说明的局部立体图。
23.图2是对图1的臂部以及适配器的结构进行说明的图。
24.图3是对图1的适配器的结构进行说明的立体图。
25.图4是对图1的适配器的结构进行说明的另一立体图。
26.图5是对图1的操作器械的结构进行说明的图。
27.图6是对图1的操作器械的结构进行说明的另一图。
28.图7是说明向适配器安装操作器械时的动作的图。
29.图8是对操作器械的拆卸进行说明的图。
30.图9是对拆卸操作器械时第1操作器械卡合部的动作进行说明的图。
31.附图标记的说明
[0032]1…
医疗用机器人;20
…
适配器(安装部);21
…
安装面;22
…
传递部;
[0033]
31
…
第1安装卡合部(安装卡合部);35
…
第2安装卡合部(安装卡合部);
[0034]
41
…
第1安装限制部(安装限制部);46
…
第2安装限制部(安装限制部);
[0035]
48
…
通道部;50
…
操作器械;51
…
主体;53
…
从动部;
[0036]
61
…
第1操作器械卡合部(操作器械卡合部);
[0037]
62
…
第2操作器械卡合部(操作器械卡合部);
[0038]
67
…
第1操作器械限制部(操作器械限制部);
[0039]
68
…
第2操作器械限制部(操作器械限制部);75
…
钳子(处理部)
具体实施方式
[0040]
参照图1~图9对本公开的一个实施方式的医疗用机器人进行说明。本实施方式的医疗用机器人1是具有可进行远程操作的多自由度臂的多自由度机械手,并且可以在操作人员对患者进行医疗处理例如进行内窥镜手术时使用本实施方式的医疗用机器人1。
[0041]
如图1所示,医疗用机器人1设置有驱动器10、适配器(相当于安装部)20、以及操作器械50。
[0042]
本实施方式中为了易于说明而将驱动器10延伸的方向设为z轴,并将从驱动器10的后端趋向前端的方向(从驱动器10趋向适配器20的方向)设为正方向而进行说明。此外,将与z轴正交的方向且在向适配器20安装操作器械50时进行相对移动的方向设为x轴,将面朝z轴正方向时的左方设为x轴正方向而进行说明。此外,将与z轴以及x轴正交的方向设为y轴,将使操作器械50从适配器20脱离时相对于适配器20的脱离方向设为y轴正方向而进行说明。
[0043]
驱动器10具有支承适配器20以及操作器械50并传递使操作器械50工作的驱动力的结构。驱动器10中配置适配器20的部分配置成能够绕沿z轴方向延伸的轴线进行旋转。
[0044]
如图2所示,驱动器10设置有多个(本实施方式中为三个)致动器部11(以下仅表记其中一个致动器部11)、以及控制部12。致动器部11和控制部12中的至少一方既可以设置在
驱动器10上,也可以设置在驱动器10的外侧,其配置位置不受限定。
[0045]
致动器部11具有产生使操作器械50工作的驱动力的结构。致动器部11以能够向后述的适配器20的多个(本实施方式中为三个)传递部22(以下仅表记其中一个传递部22)传递驱动力的方式与该多个传递部22连接,并且致动器部11具有使传递部22沿着z轴的正方向以及负方向进行移动的结构。
[0046]
致动器部11可以具有利用空气等气体,或利用流体产生驱动力的结构。或者,作为致动器部11,也可以采用具有利用电机的结构的致动器,其产生动力的方式和结构不受限定。
[0047]
此外,作为致动器部11,既可以采用具有使用活塞以及气缸的结构的致动器,还可以采用具有由其他流体产生驱动力的结构的致动器,其具体结构不受限定。
[0048]
控制部12具有控制致动器部11中产生驱动力的结构。此外,控制部12具有对传递部22在z轴的正方向以及负方向上的移动、传递部22的配置位置进行控制的结构。在本实施方式中,控制部12控制对致动器部11进行空气等气体的供给。
[0049]
如图1所示,适配器20配置在驱动器10和操作器械50之间。适配器20具有能够相对于驱动器10进行安装和拆卸,而且相对于操作器械50也能够进行安装和拆卸的结构。
[0050]
此外,适配器20具有区分位于驱动器10侧的污染区域和位于操作器械50侧的清洁区域的结构。在适配器20设置有用于区分污染区域和清洁区域的呈膜状的部件即盖布(未图示)。
[0051]
如图2所示,在适配器20至少设置有安装面21、第1安装卡合部(相当于安装卡合部)31、第2安装卡合部(相当于安装卡合部)35、第1安装限制部(相当于安装限制部)41、第2安装限制部(相当于安装限制部)46、以及通道部48。
[0052]
安装面21是适配器20中待配置操作器械50的面,并且安装面21与后述操作器械50的主体51的面中的设置有从动侧孔52的面相对。安装面21的位于z轴正方向的端部设置有第1安装卡合部31,安装面21的位于z轴负方向的端部设置有第2安装卡合部35。
[0053]
此外,如图2以及图3所示,安装面21的位于z轴正方向的区域21p与位于z轴负方向的区域21n之间设置有高低差。安装面21的位于z轴负方向的区域21n比位于z轴正方向的区域21p朝y轴正方向突出。安装面21的位于z轴正方向的区域21p设置有通道部48以及第1安装限制部41,安装面21的位于z轴负方向的区域21n设置有第2安装限制部46。
[0054]
适配器20还至少设置有传递部22、多个(本实施方式中为三个)传递侧孔24(以下仅表记其中一个传递侧孔24)、引导槽25、和两个导入部26。
[0055]
传递部22具有向操作器械50传递驱动力的结构。在本实施方式中,传递部22具有通过在传递侧孔24的内部沿z轴正方向以及负方向移动来传递驱动力的结构。
[0056]
传递部22设置有凹部23,凹部23可与后述的操作器械50的凸部54卡合。凹部23是形成在传递部22中的与操作器械50相对的面的凹部,换言之,是形成在传递部22的位于y轴正方向侧的面的凹部。
[0057]
凹部23具有在y轴正方向以及负方向上延伸的呈槽状的形状。换言之,凹部23具有容许后述凸部54从y轴正方向以及负方向进入以及离开凹部23内部的开口。
[0058]
此外,凹部23的位于z轴正方向以及负方向侧的侧壁具有与后述凸部54抵接的形状。换言之,具有能够将传递部22沿着z轴正方向以及负方向的移动传递给凸部54的形状。
[0059]
传递侧孔24为贯通孔,传递部22以能够进行相对移动的方式配置在传递侧孔24的内部。在传递侧孔24的内部,传递部22能够在沿着安装面21的方向上进行移动。传递侧孔24构造成使传递部22不会脱离于传递侧孔24。此外,传递侧孔24形成为在沿着z轴的方向上延伸的长孔状,本实施方式中的三个传递侧孔24在x轴方向上隔开间隔排列配置。
[0060]
在本实施方式中,对传递部22和传递侧孔24的组合为三组的示例进行说明,不过,传递部22和传递侧孔24的组合也可以大于三组或小于三组,组合的数量不受限定。
[0061]
引导槽25是形成在安装面21上的凹槽,并且是用于引导后述从动部53的凸部54的槽。引导槽25是沿着操作器械50相对于安装面21进行相对移动的方向而延伸的槽。本实施方式中,引导槽25在与传递侧孔24相交的方向上,例如在沿着x轴的方向上延伸。
[0062]
两个导入部26分别是在引导槽25的第1端部和第2端部处与引导槽25连续形成的槽,并且具有如下形状:槽的宽度趋向远离传递侧孔24的方向而变宽。两个导入部26各自的开口部分,换言之,两个导入部26各自在x轴正方向上的端部的宽度以及在x轴负方向上的端部的宽度优选为以下宽度:使得在该开口部分的内部至少包含凸部54在传递部22中的移动范围的宽度。在本实施方式中,在引导槽25的两个端部分别设置有导入部26,不过,也可以仅在引导槽25的第1端部或第2端部设置有导入部26。
[0063]
第1安装卡合部31形成为,从适配器20的安装面21的位于z轴正方向的端部朝y轴正方向突出。第1安装卡合部31与配置在安装面21的操作器械50抵接,并限制操作器械50朝z轴正方向移动。
[0064]
在第1安装卡合部31的与操作器械50相对的面设置有第1卡合槽32。第1卡合槽32是朝z轴负方向开口且沿着x轴延伸的槽。第1卡合槽32与后述操作器械50的第1操作器械卡合部61卡合,并限制操作器械50在沿着y轴的方向上进行移动。
[0065]
第2安装卡合部35形成为,从适配器20的安装面21的位于z轴负方向的端部朝y轴正方向突出。第2安装卡合部35与配置在安装面21的操作器械50抵接,并限制操作器械50朝z轴负方向进行移动。
[0066]
在第2安装卡合部35的与操作器械50相对的面设置有第2卡合槽36。第2卡合槽36是朝z轴正方向开口且沿着x轴延伸的槽。第2卡合槽36与后述操作器械50的第2操作器械卡合部62卡合,并限制操作器械50在沿着y轴的方向上进行移动。
[0067]
第1安装限制部41具有与后述的第1操作器械限制部67共同地将操作器械50与适配器20在沿着安装面21的方向上的相对位置,换言之在沿着z-x平面的方向上的相对位置限制在预定的位置处的结构。此外,第1安装限制部41具有容许操作器械50与适配器20在与安装面21相交的方向上,换言之在y轴方向上进行相对移动的结构。
[0068]
第1安装限制部41形成在安装面21的位于z轴正方向的区域21p,并且是形成为沿着x轴方向延伸的槽。第1安装限制部41的位于x轴正方向以及负方向的端部具有如下形状:朝向外侧且在y轴方向上的槽的深度变深。
[0069]
第1安装限制部41的在x轴的中央处设置有供后述第1操作器械限制部67卡合的卡合凹部42。卡合凹部42是朝y轴正方向开口的凹部。卡合凹部42只要是能够卡合以及脱离于第1操作器械限制部67的形状即可,卡合凹部42也可以是贯通孔。
[0070]
如图4所示,适配器20的位于安装面21相反侧的面设置有厚度减小部43,厚度减小部43构造成能够使第1安装限制部41产生挠曲变形。厚度减小部43是设置在位于安装面21
相反侧的面中的与第1安装限制部41相对应的区域上的凹部。第1安装限制部41的底部的厚度,换言之即第1安装限制部41的底部在y轴方向上的尺寸小于区域21p中其他部分的厚度。
[0071]
如图3以及图4所示,在区域21p中的与第1安装限制部41相邻的位置处设置有沿着第1安装限制部41延伸的两个缝隙44。两个缝隙44是朝厚度减小部43开口的贯通孔。
[0072]
第2安装限制部46具有与第2操作器械限制部68共同地将操作器械50和适配器20在沿着安装面21的方向上的相对位置,换言之在沿着z-x平面的方向上的相对位置限制在预定的位置处的结构。此外,第2安装限制部46具有容许操作器械50和适配器20在与安装面21相交的方向,换言之在y轴方向上进行相对移动的结构。
[0073]
第2安装限制部46形成在安装面21的位于z轴负方向的区域21n中,并且是沿着x轴方向延伸的槽。第2安装限制部46的位于x轴正方向的端部以及负方向的端部具有如下形状:朝向外侧且在z轴方向上槽的宽度变宽。
[0074]
在操作器械50从适配器20脱离时,通道部48形成从第1安装卡合部31脱离的后述第1操作器械卡合部61所经由的空间。通道部48形成在安装面21的位于z轴正方向的区域21p中,并且是沿着y轴方向延伸的贯通孔。此外,通道部48是从y轴方向进行观察时具有呈矩形的开口的贯通孔,并且矩形的开口具有的面积大于作为矩形突起的第1操作器械卡合部61的面积。
[0075]
在本实施方式中,通道部48是贯通孔,不过,通道部48只要是构成供第1操作器械卡合部61经由的空间即可,也可以是朝向y轴正方向开口的凹部。
[0076]
操作器械50具有供操作人员利用医疗用机器人1对患者进行医疗处理的结构。如图5以及图6所示,在操作器械50设置有主体51、从主体51呈棒状延伸的轴71、以及在轴71的位于主体51相反侧的端部处配置的钳子(相当于处理部)75。
[0077]
主体51构造成可实现相对于适配器20进行安装和拆卸,此外,主体51具有支承轴71的结构。主体51设置有多个(本实施方式中为三个)从动侧孔52(以下仅表记其中一个从动侧孔52)、多个(本实施方式中为三个)从动部53(以下仅表记其中一个从动部53)、第1操作器械卡合部(相当于操作器械卡合部)61、两个第2操作器械卡合部(相当于操作器械卡合部。)62(以下仅表记其中一个第2操作器械卡合部62)、操作部65、第1操作器械限制部(相当于操作器械限制部)67、以及两个第2操作器械限制部(相当于操作器械限制部)68(以下仅表记为其中一个第2操作器械限制部68)。
[0078]
从动侧孔52形成在主体51的与安装面21相对的面上,并且是沿z轴方向延伸的长孔。从动侧孔52设置在与传递侧孔24相对的位置处。后述从动部53以能够相对于主体51沿着z轴方向进行相对直线移动的方式而配置于从动侧孔52。本实施方式中,对三个从动侧孔52在x轴方向上隔开间隔排列配置的结构示例进行说明。
[0079]
从动部53具有如下结构:用于使钳子75等进行动作的驱动力从驱动器10传递给从动部53。从动部53配置成,能够依照从手术机器人传递的驱动力而在从动侧孔52的内部沿着z轴方向进行直线移动。
[0080]
在从动部53设置有凸部54。凸部54是自从动部53朝y轴负方向突出的呈柱状的部分,并且是在从动部53配置于从动侧孔52时比主体51朝y轴负方向突出的部分。凸部54具有如下结构:与适配器20的设置于传递部22的凹部23卡合,并通过该卡合来传递在z轴方向上进行直线移动的驱动力。
[0081]
如图6所示,第1操作器械卡合部61是设置在主体51的位于z轴正方向的端部处的呈矩形的突起。第1操作器械卡合部61与第1安装卡合部31的第1卡合槽32卡合,从而限制操作器械50在沿着y轴的方向上进行移动。
[0082]
如图5以及图6所示,第2操作器械卡合部62是设置在主体51的位于z轴负方向的端部处的突起。第2操作器械卡合部62与第2安装卡合部35的第2卡合槽36卡合,从而限制操作器械50在沿着y轴的方向上进行移动。
[0083]
如图5所示,操作部65是将第2操作器械卡合部62收纳在主体51中时或使第2操作器械卡合部62突出时使用的部分。操作部65设置在主体51的位于y轴正方向侧的面上且设置在主体51的位于z轴负方向侧的区域。
[0084]
操作部65配置成能够相对于主体51沿着z轴进行相对移动。例如,若使操作部65相对于主体51朝z轴正方向进行相对移动,则第2操作器械卡合部62会被收纳在主体51中。反之,若操作部65相对于主体51朝z轴负方向移动,则第2操作器械卡合部62会从主体51突出。
[0085]
第1操作器械限制部67形成在主体51的与安装面21相对的面中对应于第1安装限制部41以及卡合凹部42的位置处(参照图3以及图6)。第1操作器械限制部67具有朝y轴负方向突出且能够卡合以及脱离于第1安装限制部41以及卡合凹部42的形状。在本实施方式中,对第1操作器械限制部67具有呈圆柱状突出的形状的示例进行说明。
[0086]
第2操作器械限制部68形成在主体51的与安装面21相对的面中对应于第2安装限制部46的位置处。在本实施方式中,主体51的位于x轴方向上的两个端部分别设置有第2操作器械限制部68。第2操作器械限制部68具有朝y轴负方向突出且能够卡合以及脱离于第2安装限制部46的形状。在本实施方式中,对第2操作器械限制部68具有呈圆柱状突出的形状的示例进行说明。
[0087]
如图5以及图6所示,轴71是从主体51沿着z轴方向延伸配置的呈筒状的部件。在轴71的位于z轴正方向的端部配置有钳子75。此外,轴71中的钳子75的附近处设置有关节部72。
[0088]
关节部72具有能够改变钳子75朝向的结构,并具有能够分别以x轴以及y轴作为转动轴线而进行转动的结构。关节部72例如具有通过由传递部22传递的驱动力进行转动的结构。关节部72的结构可采用公知的结构,无特别限定。
[0089]
钳子75配置在轴71的位于z轴正方向的端部。钳子75具有通过从从动部53经由线缆等传递的驱动力而进行开闭的结构。钳子75的进行开闭的结构可采用公知的结构,无特别限定。
[0090]
接下来,对具有上述结构的医疗用机器人1的操作器械50的安装以及拆卸进行说明。首先,对向适配器20安装操作器械50的情况进行说明,接下来对从适配器20拆卸操作器械50的情况进行说明。
[0091]
在向适配器20安装操作器械50时,如图2所示,控制部12执行对致动器部11进行驱动的控制,以将传递部22配置到预定位置。若传递部22被配置到预定位置,则由传递部22的凹部23以及引导槽25形成在沿着x轴的方向上延伸的一个槽。
[0092]
在此所述的预定位置是指,传递部22的凹部23被配置到引导槽25和传递侧孔24所相交的位置处时的位置。换言之,即从动部53以及传递部22对应于操作器械50以及适配器20的安装而彼此卡合的位置。具体而言,图2示出的传递部22的配置位置即为预定位置。
[0093]
然后,如图1所示,使操作器械50在沿着x轴的方向上移动以接近适配器20,从而实施安装。在图1中,示出了使操作器械50从x轴正方向侧朝负方向侧移动而实施安装的示例。不过,也可以使操作器械50从x轴负方向侧朝正方向侧移动而相对于适配器20进行安装。
[0094]
在进行安装时,操作器械50的第1操作器械卡合部61在沿着x轴的方向上移动,并且与适配器20的第1卡合槽32卡合。此外,第2操作器械卡合部62在沿着x轴的方向上移动,并且与适配器20的第2卡合槽36卡合。
[0095]
此外,如图7所示,通过引导槽25以及导入部26而将操作器械50的从动部53引导到能够在从动部53与传递部22之间传递驱动力的位置处。例如,对从动部53配置成比引导槽25偏离z轴正方向侧或偏离负方向侧的情况进行说明。
[0096]
若操作器械50沿着x轴接近适配器20,则从动部53的凸部54与导入部26的倾斜面抵接。若进一步使操作器械50移动,则从动部53的凸部54沿着导入部26的倾斜面朝引导槽25移动,并进入由引导槽25以及凹部23形成的槽中。
[0097]
此外,若操作器械50沿着x轴接近适配器20,则第2操作器械限制部68进入第2安装限制部46的槽中。若进一步使操作器械50移动,则第1操作器械限制部67进入第1安装限制部41的槽中。
[0098]
第1操作器械限制部67朝y轴负方向下压第1安装限制部41的底面并同时在第1安装限制部41内移动。具体而言,第1安装限制部41的厚度小于其他区域,并且与第1安装限制部41相邻地设置有两个缝隙44,因此,第1安装限制部41容易沿y轴方向产生变形。即,第1安装限制部41可通过第1操作器械限制部67的按压力而朝y轴负方向产生变形。因此,第1操作器械限制部67能够在朝y轴负方向下压第1安装限制部41的底面的同时在第1安装限制部41内移动。
[0099]
若第1操作器械限制部67移动到与卡合凹部42相对的位置,则第1操作器械限制部67进入卡合凹部42(换言之,第1操作器械限制部67与第1安装限制部41的卡合凹部42卡合),并且对第1安装限制部41施加的按压力消失,从而已被压下的第1安装限制部41的底面复位到y轴正方向。已卡合的第1操作器械限制部67以及卡合凹部42限制适配器20与操作器械50之间在x轴方向上的相对移动。
[0100]
若操作器械50相对于适配器20而移动到预先规定的位置,则凸部54被配置在凹部23的内部。换言之,凸部54被配置在图7中虚线示出的位置处。在本实施方式中,对第1操作器械限制部67与卡合凹部42相卡合的位置作为预先规定的位置的示例进行说明。由此,传递部22以及从动部53以能够传递驱动力的方式彼此卡合,从而完成操作器械50以及适配器20的安装。
[0101]
当从适配器20拆卸操作器械50时,首先如图5所示,进行使操作器械50的操作部65朝z轴正方向滑动的操作。通过该操作,第2操作器械卡合部62被收纳到主体51中。从而使得被收纳的第2操作器械卡合部62与第2卡合槽36之间的卡合被解除(参照图8)。
[0102]
然后,如图8所示,朝离开适配器20的方向,换言之,朝大致y轴正方向拿起操作器械50的位于z轴负方向侧的端部。此时,如图9所示,第1操作器械卡合部61的端部一边转动一边朝大致y轴负方向移动。换言之,进入通道部48的内部。
[0103]
此外,如图7以及图8所示,第1操作器械限制部67一边转动一边朝大致y轴正方向移动,从而脱离所卡合的第1安装限制部41以及卡合凹部42。第2操作器械限制部68一边转
动一边朝大致y轴正方向移动,从而脱离所卡合的第2安装限制部46。
[0104]
然后,如图8所示,朝大致y轴正方向整体拿起操作器械50。此时,第1操作器械卡合部61以从第1卡合槽32以及通道部48抽离的方式而与第1卡合槽32以及通道部48分离。如上所述,完成从适配器20拆卸操作器械50的操作。
[0105]
根据上述构成的医疗用机器人1,在操作器械50设置有第1操作器械卡合部61以及第2操作器械卡合部62,在适配器20设置有第1安装卡合部31以及第2安装卡合部35,通过操作器械50和适配器20在沿着安装面21的方向上进行相对移动,而相对于适配器20安装操作器械50。此外,通过操作器械50和适配器20在与安装面21大致相交的方向上进行相对移动,而使操作器械50从适配器20脱离。
[0106]
通过设置第1操作器械卡合部61和第2操作器械卡合部62、以及第1安装卡合部31和第2安装卡合部35,而将安装到适配器20上的操作器械50的相对位置(在沿着安装面21的方向上相对于适配器20的相对位置)限制在预定的位置。此外,容许在与安装面21大致相交的方向上进行相对移动(操作器械50与适配器20的相对移动),因此,在使操作器械50从适配器20脱离时,第1操作器械卡合部61与第1安装卡合部31不易产生干扰,并且第2操作器械卡合部62与第2安装卡合部35不易产生干扰。
[0107]
通过设置通道部48,从而在使操作器械50从适配器20脱离时第1操作器械卡合部61与安装面21不易产生干扰。此外,能够使第1操作器械卡合部61朝安装面21进行相对移动,从而易于解除第1操作器械卡合部61与第1安装卡合部31之间的卡合。
[0108]
本公开的技术范围不限于上述实施方式,在不脱离本公开主旨的范围内能够施加各种变更。例如,在上述实施方式中,对既可以从x轴正方向侧安装操作器械50,也可以从负方向侧安装操作器械50的结构进行了说明,不过操作器械50也可以是仅能够从x轴正方向侧进行安装的结构,还可以是仅能够从负方向侧进行安装的结构。
[0109]
此外,本实施方式中,将实施方式应用于驱动器10和适配器20能够安装和拆卸的示例进行了说明,不过,相当于适配器20的构成也可以与驱动器10一体形成,无特别限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。