用于ct三维立体激光引导穿刺定位装置及其定位方法
技术领域
1.本发明涉及医疗器械技术领域,特别是涉及一种用于ct三维立体激光引导穿刺定位装置及其定位方法。
背景技术:
2.ct引导的穿刺技术近年来在临床诊治中得到了广泛的应用,包括:穿刺活检术、微波刀治疗术、氩氦刀治疗术、射频消融治疗术,放射性粒子植入术等。
3.现有技术方案包含:1.徒手穿刺:先行ct扫描,在皮肤表面使用定位纸选择穿刺进针点,在ct图像上勾勒出穿刺路径,测量进针的深度和角度,穿刺角度控制完全依赖于操作人员的技术水平,需要反复ct扫描确认穿刺针位置。2.二维穿刺定位辅助装置:在徒手穿刺的基础上,通过辅助装置在xoy 平面上引导进针角度进行穿刺,但z轴方向角度仍由操作人员主观决定,无法在三维空间精确定位。3.接触式三维穿刺定位辅助装置:在二维穿刺的基础上增加了z轴方向角度引导,三维角度固定后需拆除装置,进一步穿刺时角度会产生偏差,增加穿刺步骤和感染风险。
4.现有技术方案操作复杂,难以精准穿刺或感染风险提高,给患者造成不必要的损害,且增加了医疗风险。
技术实现要素:
5.本发明的目的在于提供一种用于ct三维立体激光引导穿刺定位装置及其定位方法,能够帮助医生快速确定穿刺方向,提高了穿刺的成功率,降低了穿刺的感染风险。
6.为解决上述技术问题,本发明采用的一个技术方案是:提供一种用于ct 三维立体激光引导穿刺定位装置,包括激光角度装置、倾角装置、旋转装置、伸缩装置和可移动式底座,所述旋转装置上端安装有激光角度装置和倾角装置,所述旋转装置的下端过盈连接于伸缩装置上,所述伸缩装置的下端过盈连接于可移动式底座上,所述激光角度装置包括激光角度壳体、激光角度仪和激光角度壳体一端设置的连接座,所述激光角度壳体上开设有激光窗口,所述激光角度仪设置于激光角度壳体内并伸出激光窗口,所述连接座与旋转装置铰接连接使激光角度壳体以铰接处为圆心进行旋转。
7.进一步的是,所述旋转装置包括通过子母钉二连接的支撑杆和接头,所述接头上还固定安装有支撑杆旋转槽板,所述支撑杆旋转槽板上设有弧形的限位滑槽一,所述限位滑槽一内设置有蝶形螺栓一且蝶形螺栓一的一端与支撑杆固定连接,所述支撑杆的上部通过固定螺栓与激光角度装置旋转槽板固定连接,所述支撑杆的上端通过子母钉一与激光角度装置进行铰接,所述激光角度装置旋转槽板上设有限位滑槽二,所述限位滑槽二内设置有蝶形螺栓二且蝶形螺栓二的一端与激光角度装置固定连接,所述倾角装置固定安装在支撑杆的中部,所述接头的下端过盈连接于伸缩装置上。
8.进一步的是,所述伸缩装置包括上伸缩杆、锁定组件、紧固锁连接部分和下伸缩杆,所述上伸缩杆和下伸缩杆可相对直线运动且位于紧固锁连接部件内,所述锁定组件将
上伸缩杆和下伸缩杆锁紧固定。
9.进一步的是,所述可移动式底座包含底座主体、万向轮主体与万向轮刹车组件,所述底座主体下端固定安装有万向轮主体,所述万向轮主体上安装有万向轮刹车组件。
10.进一步的是,所述下伸缩杆的下端过盈连接于底座主体上。
11.进一步的是,所述倾角装置包括倾角装置上壳体、螺栓三、数字倾角仪与倾角装置下壳体,所述倾角装置上壳体和倾角装置下壳体通过螺栓三固定连接,所述倾角装置上壳体设有显示窗,所述倾角装置上壳体和倾角装置下壳体之间形成的安装空间内设置有数字倾角仪,所述数字倾角仪与显示窗对应。
12.进一步的是,所述激光角度壳体包括激光角度装置上壳体、螺栓一、激光角度装置下壳体和螺栓二,所述激光角度装置上壳体和激光角度装置下壳体通过螺栓一通过安装,所述激光角度装置下壳体通过螺栓二将激光角度仪固定安装。
13.一种用于ct三维立体激光引导穿刺定位方法,所述定位方法如下:根据病变的具体位置和毗邻关系将穿刺过程分为两种情形,情形一为二维定位方法,其可以通过竖直面内的某一角度进行穿刺以到达病变的生长位置,此时适宜的穿刺操作的准确角度由ct图像测量;情形二为三维定位方法,由于骨骼、血管或其他重要器官阻挡,需要穿刺平面与竖直面有一定的角度,适宜的穿刺操作的准确角度由ct图像测量。
14.进一步的是,所述二维定位方法的具体步骤为将非接触式穿刺定位装置移动至ct机床床尾,调整蝶形螺栓二转动使激光角度装置下壳体的底面与地面呈平行状态即激光角度仪的显示屏显示0
°
,调整蝶形螺栓一使激光角度装置保持固定,再通过调整蝶形螺栓一使支撑杆转动,当数字倾角仪显示角度为 ct扫描图像中所测定的穿刺角度时通过蝶形螺栓一固定,此时激光角度仪所射出激光会呈现为两条相互垂直的绿色激光线,一条与数字倾角仪显示角度一致,这便是穿刺针的穿刺方向,通过可移动式底座进行移动,调整该线通过体表穿刺点,通过万向轮刹车组件使整个装置静止于当前位置,穿刺操作时,整个实施过程中保证绿色直线始终能呈现在穿刺针上,沿该直线将穿刺针通过体表穿刺点推入ct图像中所测量到的适宜深度,即可准确完成穿刺操作,抵达病变生长位置。
15.进一步的是,所述三维定位方法的具体步骤为将非接触式穿刺定位装置移动至ct机床床旁,之后调整蝶形螺栓一使支撑杆转动,当数字倾角仪显示角度为ct扫描图像中所确定穿刺平面与竖直面的夹角时通过蝶形螺栓一固定,此时已确定穿刺操作的实施平面;然后通过调整蝶形螺栓二转动激光角度装置,使激光角度仪的显示屏显示数值为ct图像确定的适宜穿刺角度时,再通过蝶形螺栓二将激光角度装置固定,通过可移动式底座3进行移动,调整激光线十字中心通过体表穿刺点,使用万向轮刹车组件使整个装置静止于当前位置,此时激光角度装置所射出的激光十字中心方向便是实施穿刺操作的正确方向,实施穿刺操作的过程中,保证整个穿刺过程激光十字中心始终在针尾正中而不发生偏离,将穿刺针通过体表穿刺点推入ct图像中所测量的适宜深度,即可准确完成穿刺操作,抵达病变生长位置
16.本发明的一种用于ct三维立体激光引导穿刺定位装置及其定位方法的有益效果是:采用非接触式穿刺定位方式,防止接触人体而造成伤口的感染,减少医疗风险,且不需要进行繁琐的拆卸操作,使用方便;所使用的激光角度仪与数字倾角仪都可以将当前角度进行数值显示,保证定位准确,提高穿刺成功率,减少多次穿刺对病人造成的额外痛苦;该
穿刺定位装置结构简单,相比市面上已有的智能导航定位装置,既能达到相同的目的又能大大减少使用成本。该三维立体激光引导非接触式穿刺定位装置设计合理,构思新颖,定位准确,操作简单。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
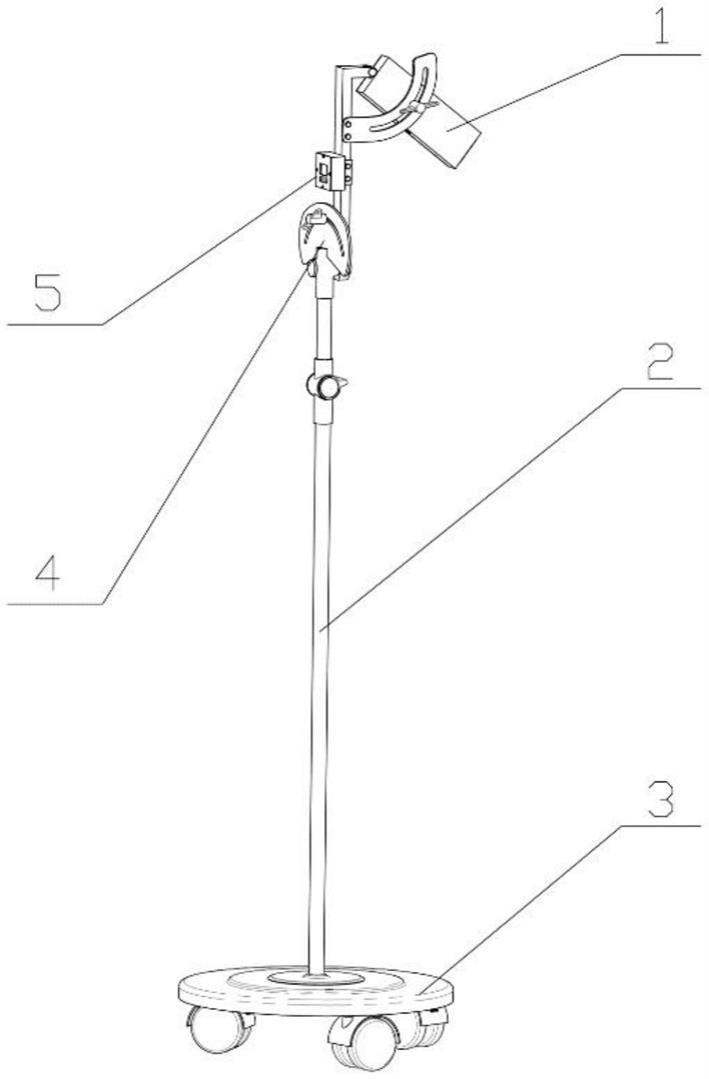
18.图1为本发明三维立体激光引导非接触式穿刺定位装置的系统结构图;
19.图2为本发明的激光角度装置示意图;
20.图3为本发明的伸缩装置示意图;
21.图4为本发明的可移动式底座示意图;
22.图5为本发明的旋转装置示意图;
23.图6为本发明的倾角装置示意图。
24.图中:1、激光角度装置;2、伸缩装置;3、可移动式底座;4、旋转装置; 5、倾角装置;1-1、激光角度装置上壳体;1-2、螺栓一;1-3、激光角度仪; 1-4、激光角度装置下壳体;1-5、螺栓二;2-1、上伸缩杆;2-2、锁定组件; 2-3、紧固锁连接部分;2-4、下伸缩杆;3-1、底座主体;3-2、万向轮主体; 3-3、万向轮刹车组件;4-1、子母钉一;4-2、支撑杆;4-3、激光角度装置旋转槽板;4-4、固定螺栓;4-5、支撑杆旋转槽板;4-6、蝶形螺栓一;4-7、子母钉二;4-8、接头;4-9、限位滑槽一;4-10、限位滑槽二;4-11、蝶形螺栓二;5-1、倾角装置上壳体;5-2、螺栓三;5-3、数字倾角仪;5-4、倾角装置下壳体。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明的具体实施方式进行详细说明。这些优选实施方式的示例在附图中进行了例示。附图中所示和根据附图描述的本发明的实施方式仅仅是示例性的,并且本发明并不限于这些实施方式。
26.在此,还需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
27.以及,在本发明的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
28.请参阅图1至图6,本发明实施例包括:
29.针对穿刺操作的相关背景进行简要说明以充分介绍该产品的使用方式:
30.进行穿刺操作之前对病人进行ct扫描以确定病变生长位置,使用计算机进行ct扫描后的立体建模,获取当前病变生长位置的截面图像。根据ct扫描图像结合病变的生长位
置在图像中确定穿刺操作的具体实施方位。由于进行 ct扫描时人体以某个体位处于相对静止状态,以病变穿刺靶点作为坐标原点可以建立笛卡尔坐标系,此时x0y平面代表竖直横断面,可以根据病变的生长位置将穿刺操作分为两种情形:情形一为相对简单的情形,即可以从x0y平面中获得某一个穿刺角度,穿刺针沿该角度实施穿刺操作时不会受到骨骼、血管等重要脏器的阻挡,情形一需要确定的穿刺参数为穿刺进针点、穿刺角度和穿刺深度;情形二为相对复杂的情形,即无法从x0y平面获取某一穿刺角度,此时穿刺操作的实施平面与x0y平面有一定的夹角,为确定该平面的空间位置,必须测量该夹角的大小,确定实施平面以后,其余的操作同情形一,情形二需要确定的穿刺参数为穿刺进针点、穿刺实施平面与xoy平面的夹角、穿刺角度与穿刺深度。由于以上的穿刺参数均可以在ct图像中进行获取,该发明的作用便是将ct图像中获取的角度参数应用于实际穿刺操作过程,以保证穿刺的准确性。
31.一种用于ct三维立体激光引导穿刺定位装置,包括激光角度装置1、倾角装置5、旋转装置4、伸缩装置2和可移动式底座3,所述旋转装置4上端安装有激光角度装置1和倾角装置5,所述旋转装置1的下端过盈连接于伸缩装置2上,所述伸缩装置2的下端过盈连接于可移动式底座3上,所述激光角度装置1包括激光角度壳体、激光角度仪1-3和激光角度壳体一端设置的连接座,所述激光角度壳体上开设有激光窗口,所述激光角度仪1-3设置于激光角度壳体内并伸出激光窗口,所述连接座与旋转装置4铰接连接使激光角度壳体以铰接处为圆心进行旋转。
32.进一步的是,所述旋转装置4包括通过子母钉二4-7连接的支撑杆4-2 和接头4-8,所述接头4-8上还固定安装有支撑杆旋转槽板4-5,所述支撑杆旋转槽板4-5上设有弧形的限位滑槽一4-9,所述限位滑槽一4-9内设置有蝶形螺栓一4-6且蝶形螺栓一4-6的一端与支撑杆4-2固定连接,所述支撑杆 4-2的上部通过固定螺栓4-4与激光角度装置旋转槽板4-3固定连接,所述支撑杆4-2的上端通过子母钉一4-1与激光角度装置1进行铰接,所述激光角度装置旋转槽板4-3上设有限位滑槽二4-10,所述限位滑槽二4-10内设置有蝶形螺栓二4-11且蝶形螺栓二4-11的一端与激光角度装置1固定连接,所述倾角装置5固定安装在支撑杆4-2的中部,所述接头4-8的下端过盈连接于伸缩装置上。
33.进一步的是,所述伸缩装置2包括上伸缩杆2-1、锁定组件2-2、紧固锁连接部分2-3和下伸缩杆2-4,所述上伸缩杆2-1和下伸缩杆2-4可相对直线运动且位于紧固锁连接部件2-3内,所述锁定组件2-2将上伸缩杆2-1和下伸缩杆2-4锁紧固定。锁定组件2-2的锁扣可以扣合或者打开,当锁扣处于开启状态时,上伸缩杆2-1可以进行上下直线运动,从而带动主要的工作部分进行高度的定位,当工作部分处于适宜高度时,闭合锁扣,使高度固定。
34.进一步的是,所述可移动式底座3包含底座主体3-1、万向轮主体3-2与万向轮刹车组件3-3,所述底座主体3-1下端固定安装有万向轮主体3-2,所述万向轮主体3-2上安装有万向轮刹车组件3-3。
35.进一步的是,所述下伸缩杆2-4的下端过盈连接于底座主体3-1上。
36.进一步的是,所述倾角装置5包括倾角装置上壳体5-1、螺栓三5-2、数字倾角仪5-3与倾角装置下壳体5-4,所述倾角装置上壳体5-1和倾角装置下壳体5-4通过螺栓三5-2固定连接,所述倾角装置上5-1壳体设有显示窗,所述倾角装置上壳体5-1和倾角装置下壳体5-4之间形成的安装空间内设置有数字倾角仪5-3,所述数字倾角仪5-3与显示窗对应。
37.进一步的是,所述激光角度壳体1包括激光角度装置上壳体1-1、螺栓一 1-2、激光角度装置下壳体1-4和螺栓二1-5,所述激光角度装置上壳体1-1 和激光角度装置下壳体1-4通过螺栓一1-2通过安装,所述激光角度装置下壳体1-4通过螺栓二1-5将激光角度仪1-3固定安装。
38.一种用于ct三维立体激光引导穿刺定位方法,所述定位方法如下:根据病变的具体位置和毗邻关系将穿刺过程分为两种情形,情形一为二维定位方法,其可以通过竖直面内的某一角度进行穿刺以到达病变的生长位置,此时适宜的穿刺操作的准确角度由ct图像测量;情形二为三维定位方法,由于骨骼、血管或其他重要器官阻挡,需要穿刺平面与竖直面有一定的角度,适宜的穿刺操作的准确角度由ct图像测量。
39.通过ct扫描图像获取病人的病变位置,若进行穿刺操作,确定是情形一的二维定位方法还是情形二的三维定位方法,根据不同的情形进行不同的仪器调整。
40.针对情形一的二维定位方法,病人进行穿刺手术时以某个体位处于相对静止状态,将非接触式穿刺定位装置移动至ct机床床尾,调整激光角度装置1 处的蝶形螺栓二4-11,转动激光角度装置1,使激光角度装置下壳体1-4的底面与地面呈平行状态即激光角度仪的显示屏显示0
°
,拧紧激光角度装置1处的蝶形螺栓二4-11,使激光角度装置1保持固定,再通过调整支撑杆旋转槽板4-5处的蝶形螺栓一4-6,转动支撑杆4-2,当数字倾角仪5-3显示角度为 ct扫描图像中所测定的穿刺角度时,拧紧支撑杆旋转槽板4-5处的蝶形螺栓一4-6,此时激光角度仪1-3所射出激光会呈现为两条相互垂直的绿色激光线,一条与数字倾角仪显示角度一致,这便是穿刺针的穿刺方向,通过可移动式底座3进行移动,调整该线通过体表穿刺点,通过万向轮刹车组件3-3使整个装置静止于当前位置。穿刺操作时,整个实施过程中保证绿色直线始终能呈现在穿刺针上,沿该直线将穿刺针通过体表穿刺点推入ct图像所测量到的适宜深度,即可准确完成穿刺操作,抵达病变生长位置。
41.针对情形二的三维定位方法,同样的,由于病人进行穿刺手术时以某个体位处于相对静止状态,将非接触式穿刺定位装置移动至ct机床床旁,情形二中数字倾角仪5-3的作用是确定穿刺操作的实施平面,而激光角度仪1-3的作用是确定穿刺角度。开始角度值调整之后,拧松支撑杆旋转槽板4-5处的蝶形螺栓一4-6,转动支撑杆4-2,以调整数字倾角仪5-3。当数字倾角仪5-3显示角度偏离竖直方向的角度值为ct扫描图像中所确定的穿刺操作实施平面与 xoy平面的夹角时,拧紧支撑杆旋转槽板4-5处的蝶形螺栓一4-6,此时已确定穿刺操作的实施平面。然后通过调整激光角度装置1处的蝶形螺栓二4-11,转动激光角度装置1,使激光角度仪1-3的显示屏显示数值为ct图像确定的穿刺角度,拧紧激光角度装置1处的蝶形螺栓二4-11,固定激光角度装置1。通过可移动式底座3进行移动,调整激光线十字中心通过体表穿刺点,使用万向轮刹车组件3-3使整个装置静止于当前位置。此时激光角度装置1所射出的激光十字中心方向便是实施穿刺操作的正确方向。实施穿刺操作的过程中,保证整个穿刺过程激光十字中心始终在针尾正中而不发生偏离,将穿刺针通过体表穿刺点推入ct图像所测量的适宜深度,即可准确完成穿刺操作,抵达病变生长位置。
42.综上,本发明可移动式底座可以控制整个装置在病房中的位置,确保当前位置可以较好显示穿刺操作的正确方向;伸缩装置可以在适宜范围内调整工作部件的高度,确保定位准确;激光角度装置与倾角装置是角度定位工作部分,激光角度装置所射出的激光为穿刺操作的基准;旋转装置是主要的角度调节机构,可以改变激光角度装置与倾角装置的
角度值,使其与ct图像中已确定的穿刺手术参数相吻合。在人的操作下,激光角度装置、伸缩装置、可移动式底座、倾角装置和旋转装置配合使用,结合ct扫描图像,实现穿刺手术的准确定位,其操作简单,使用方便,定位精度高并降低医疗风险。
43.此外,需要说明的是,在本说明书中,“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
