1.本发明涉及一种定向系统和方法,尤其涉及一种局部放电定向系统和方法。
背景技术:
2.众所周知,在供电线路中,局部放电(partial discharge,pd)是电气设备绝缘故障的主要原因,当电气设备出现绝缘故障时,很容易导致整条供电线路瘫痪。
3.因此,为了及时反馈电气设备的运行状况,常常需要对电气设备进行局部放电检测,并对局部放电进行准确定向,从而能够为电气设备的状态监测和维护提供重要信息。
4.当前,由于特高频电磁波在抗干扰性、传播速度、灵敏度等方面均有较好性能,因此当电气设备发生局部放电后,通过传感器接收特高频电磁波信号,就可以实现局部放电的定向。
5.基于此,本案发明人采用了全新的设计思路,设计了一种新的基于特高频传感器立体面阵和聚类的局部放电定向系统和方法,其易于实施,并且有着较高的局部放电定向精度。
技术实现要素:
6.本发明的目的之一在于提供一种基于特高频传感器立体面阵和聚类的局部放电定向系统,该局部放电定向系统操作简便,易于实施,其可以对配网线路的特高频局部放电进行定向,且具有较高的定向精度。
7.基于上述目的,本发明提出一种基于特高频传感器立体面阵和聚类的局部放电定向系统,其包括:
8.正十二面体框架;
9.至少六个偶极子天线,其分别对应设于正十二面体框架的至少六个面上;
10.处理模块,其与各偶极子天线的数据输出端连接,以接收各偶极子天线检测的原始特高频局部放电数据;所述处理模块对所述原始特高频局部放电数据进行扩展以生成样本数据,并对样本数据进行聚类,并将聚类结果中的最大类的中心值作为局部放电的最终定向结果。
11.发明人对于局部放电定向系统采用了合理的优化设计,其能够基于特高频局部放电信号的幅值大小和特殊的偶极子天线阵列布置实现对局部放电的定向,由于阵列具有面阵特性,由正十二面体框架和至少六个偶极子天线所构成的特高频传感器立体面阵经检测所给出的局部放电源定向结果是二维的,也就是说,对于每一个原始特高频局部放电数据其均含有(x,y)二维位置坐标,以及与该二维位置坐标对应的局部放电幅值信息(或称为强度信息)。因此,相较于以往只给出局部放电源方向的定向方法,其结果更加直观,且操作简便,能够显著提升巡检效率。
12.需要指出的是,考虑到特高频传感器立体面阵中偶极子天线的数量十分有限,为
了确保局部放电的精确定向,本发明对原始特高频局部放电数据进行扩展,从而获得数量更多的样本数据。
13.此外,在本发明中,考虑到局部放电的定向结果往往由于噪声及电磁波传输路径影响会呈现一定的波动性,本发明还采用了聚类的方法减小定向误差,以进一步提高定向精度,其可以显著提高本发明所述的局部放电定向系统的可用性。
14.进一步地,在本发明所述的局部放电定向系统中,六个偶极子天线分别设于所述正十二面体框架的六个相邻面上。
15.进一步地,在本发明所述的局部放电定向系统中,所述每一个偶极子天线均包括:介质基板以及贴附于介质基板上的成对设置的椭圆形金属贴片,所述椭圆形金属贴片彼此之间轴对称设置,椭圆形金属贴片的长轴方向与成对设置的椭圆形金属贴片的对称轴的延伸方向一致。
16.进一步地,在本发明所述的局部放电定向系统中,所述椭圆形金属贴片的长轴a为55-65mm,短轴b为25-35mm。
17.进一步地,在本发明所述的局部放电定向系统中,所述介质基板为环氧树脂玻璃纤维板;并且/或者所述介质基板的相对介电常数为4.1-4.5。
18.进一步地,在本发明所述的局部放电定向系统中,各所述椭圆形金属贴片上均对应设有馈电点,所述偶极子天线的数据输出端与各馈电点对应连接,所述数据输出端背向于椭圆形金属贴片设于介质基板的另一侧。
19.进一步地,在本发明所述的局部放电定向系统中,还包括:用于飞行巡检的无人机,所述正十二面体框架设于所述无人机上。
20.需要指出的是,本发明所述的局部放电定向系统的装置较为轻巧,其能够满足常用的无人机负荷要求,该局部放电定向系统利用正十二面体框架可以挂载于无人机上,从而跟随无人机实现对线路及设备的飞行巡检。
21.相应地,本发明的另一目的在于提供一种基于特高频传感器立体面阵和聚类的局部放电定向方法,该局部放电定向方法可以基于本发明上述的局部放电系统进行实施,其易于实施,且可以实现对局部放电的精准定向。
22.基于上述目的,本发明提出一种基于特高频传感器立体面阵和聚类的局部放电定向方法,其包括步骤:
23.(1)采用特高频传感器立体面阵采集一段时间内的局部放电源的特高频局部放电信号;其中所述特高频传感器立体面阵包括:正十二面体框架;至少六个偶极子天线,其分别对应设于正十二面体框架的至少六个面上;
24.(2)与各偶极子天线的数据输出端连接的处理模块基于特高频局部放电信号的幅值数据生成样本数据;
25.(3)处理模块对样本数据进行聚类,并将聚类结果中的最大类的中心值作为局部放电的最终定向结果。
26.进一步地,在本发明所述的局部放电定向方法中,在步骤(2)中,所述处理模块对接收自各偶极子天线的特高频局部放电信号的幅值数据进行归一化处理,然后对归一化处理后的数据进行多项式插值拟合以扩展数据,从而得到样本数据。
27.也就是说,在本技术方案中,偶极子天线测得的原始数据含有位置坐标信息和对
应于该位置坐标的幅值信息。在本发明上述技术方案中,考虑到局部放电定向装置中设置的偶极子天线数量十分有限,为了确保局部放电的精确定向,本发明可以基于作为原始数据的幅值数据进行数据扩展,以获得样本数据。
28.在本发明中,通过在处理模块中对这些接收自各偶极子天线的特高频局部放电信号的幅值数据进行简单归一化后,再进一步采用多项式插值拟合,即可获得样本数据。其中,多项式插值拟合的过程,即对位置坐标信息中的横坐标x和纵坐标y建立如下所示的一元n次方程:
29.y(x)=anxn a
n-1
x
n-1
l a2x2 a1x a030.其中,a0,a1,
……
,an为待求系数,联立建立方程组并利用最小二乘法求解未知数。
31.进一步地,在本发明所述的局部放电定向方法中,在步骤(3)中,所述处理模块采用k-means聚类方法对样本数据进行聚类。
32.在本发明上述技术方案中,k-means聚类方法是目标划分中较为经典的聚类算法,其对样本数据进行的聚类过程是优化使得所有类中的点距离中心值的欧式距离之和最小:
[0033][0034]
其中,e是所有点的平方和误差,xj为第j次局部放电的定向结果,并且是第i个聚类mi中的点,μi是聚类mi的中心值。
[0035]
由此,通过聚类方法可以将样本数据进行聚类,并将聚类结果中的最大类的中心值作为局部放电的最终定向结果,以此减小定向误差,进一步提高定向精度。
[0036]
进一步地,在本发明所述的局部放电定向方法中,所述样本数据以具有不同深浅颜色的图像来表征,图像中颜色最深处对应表示最终定向结果。
[0037]
需要说明的是,在本发明中,在构建二维定向结果图时,每一个样本数据均包括它们自身的x坐标、y坐标以及幅值。其中,幅值大小可以用不同深浅的颜色表示,幅值越大则颜色越深,幅值越小则颜色越浅。基于这种设计,可以将样本数据以不同深浅颜色的图像来表征,图像中颜色最深处(幅值最大处)即可对应表示最终定向结果。
[0038]
相较于现有技术,本发明所述的基于特高频传感器立体面阵和聚类的局部放电定向系统和方法具有如下所述的优点以及有益效果:
[0039]
本发明所述的局部放电定向系统是基于特高频局部放电信号的幅值大小和特殊的阵列布置实现对局部放电的定向,由于阵列具有面阵特性,给出的局部放电源的定向结果是二维的,相较于以往只给出局部放电源方向的定向方法,其定向结果更加直观,且操作简便,显著提升了巡检效率。
[0040]
此外,由于局部放电的定向结果往往由于噪声及电磁波传输路径影响会呈现一定的波动性,本发明对定向结果利用聚类的方法进一步提高了定向精度,显著提高了本发明所述的局部放电定向系统的可用性。
[0041]
相应地,由于本发明所述的局部放电定向系统的装置轻巧,其能够满足常用的无人机负荷要求,该局部放电定向系统利用正十二面体框架可以挂载于无人机上,从而跟随无人机实现对线路及设备的飞行巡检。
附图说明
[0042]
图1为本发明所述的局部放电定向系统在一种实施方式下的偶极子天线的结构正视图。
[0043]
图2为本发明所述的局部放电定向系统在一种实施方式下的偶极子天线的结构侧视图。
[0044]
图3示意性地显示了本发明所述的偶极子天线在一种实施方式下处于1100mhz下的增益方向图。
[0045]
图4为本发明所述的局部放电定向系统在一种实施方式下的六个偶极子天线布置在正十二面体框架上的结构示意图。
[0046]
图5为本发明所述的局部放电定向方法在一种实施方式下对局部放电进行定向的流程图。
[0047]
图6为本发明所述的局部放电定向方法在一种实施方式下对局部放电进行定向的二维定向结果图。
具体实施方式
[0048]
下面将结合说明书附图和具体的实施例对本发明所述的基于特高频传感器立体面阵和聚类的局部放电定向系统和方法做进一步的解释和说明,然而该解释和说明并不对本发明的技术方案构成不当限定。
[0049]
在本发明中,发明人设计了一种基于特高频传感器立体面阵和聚类的局部放电定向系统,这种局部放电定向系统具体可以包括:正十二面体框架2(如图4所示)、处理模块和6个偶极子天线1(如图1所示)。其中,这6个偶极子天线1用于检测局部放电源的特高频局部放电信号,在本实施方式中,各个偶极子天线1的具体结构可以参阅下述图1和图2。
[0050]
图1为本发明所述的局部放电定向系统在一种实施方式下的偶极子天线的结构正视图。
[0051]
图2为本发明所述的局部放电定向系统在一种实施方式下的偶极子天线的结构侧视图。
[0052]
如图1和图2所示,在本实施方式中,本发明所述的局部放电定向系统所采用的每一个偶极子天线1均包括:介质基板3以及贴附于介质基板3上的成对设置的椭圆形金属贴片4。其中,介质基板3可以选用环氧树脂玻璃纤维板(fr4),两个椭圆形金属贴片4均贴附在环氧树脂玻璃纤维板平面上。
[0053]
结合参阅图1和图2可以看出,在本实施方式中,两个椭圆形金属贴片4彼此之间呈轴对称设置,且椭圆形金属贴片4的长轴方向与两个椭圆形金属贴片4的对称轴的延伸方向一致。其中,各个椭圆形金属贴片4上均对应设有馈电点5。
[0054]
需要说明的是,在本发明所述的偶极子天线1中,各馈电点5均与偶极子天线1的数据输出端对应连接,且数据输出端可以采用背馈设置的方式,背向于椭圆形金属贴片4设置在介质基板3的另一侧。
[0055]
相应地,在本发明中,六个偶极子天线1的数据输出端均分别与处理模块连接,以确保处理模块能够接收到各个偶极子天线1检测到的局部放电源的特高频局部放电信号,并基于处理模块对局部放电源进行定向。
[0056]
如图1所示,设定椭圆形金属贴片4的长轴为a,短轴为b,介质基板3的相对介电常数为εr,则可以求得该偶极子天线1在四分之一波长时的谐振中心频率f为:
[0057][0058]
在上述公式中,短轴b的单位为mm,谐振中心频率f的单位为mhz。此外,就本发明所述的偶极子天线1而言,椭圆形金属贴片的长轴a可以控制在55-65mm之间;椭圆形金属贴片的短轴b可以控制在25-35mm之间;介质基板3的相对介电常数εr可以为4.1-4.5。
[0059]
在本发明中,增加椭圆形金属贴片4的椭圆率可扩展偶极子天线1的阻抗带宽,因此,为了扩展偶极子天线1的带宽,要尽量增大椭圆形金属贴片4的长轴a和短轴b。
[0060]
综合考虑带宽和实际尺寸限制,在本实施方式中,将偶极子天线1的参数设置为:a=60mm,b=30mm;介质基板3的相对介电常数εr为4.4;偶极子天线1采用背馈设置的sma型连接器作为数据输出端,以确保偶极子天线1检测到的特高频局部放电信号能够经同轴电缆和50欧姆sma型连接器输出至处理模块。最终所设计的偶极子天线1中心谐振频率为1190mhz。
[0061]
图3示意性地显示了本发明所述的偶极子天线在一种实施方式下处于1100mhz下的增益方向图,其中xoz和yoz表示不同的平面。
[0062]
如图3所示,本发明所述的偶极子天线1的增益具有明显的方向性,即当局部放电源正对偶极子天线1时,其特高频局部放电信号增益数值最大;当局部放电源背对偶极子天线1时,其特高频局部放电信号增益数值最小。
[0063]
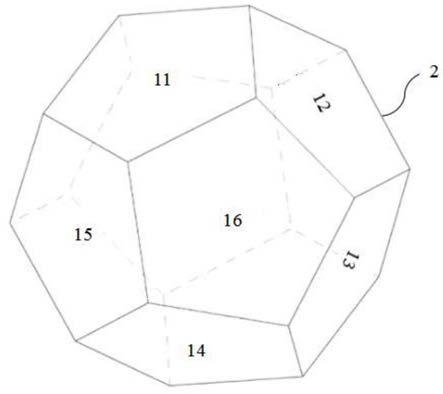
由此,为了进一步加强不同方向接收特高频局部放电信号的幅值存在差异这一特性,本发明将6个偶极子天线1布置于一个正十二面体框架上,构成一个半正十二面体天线阵列,其显著不同于已有局放检测的阵列布置方式,具体布置方式如下述图4所示。
[0064]
图4为本发明所述的用于配网线路特高频局部放电定向的传感器在一种实施方式下的六个偶极子天线布置在正十二面体框架上的结构示意图。
[0065]
如图4所示,在本实施方式中,本发明所述的6个偶极子天线(偶极子天线11、偶极子天线12、偶极子天线13、偶极子天线14、偶极子天线15、偶极子天线16)分别设于正十二面体框架2的六个相邻面上。通过这种设置,能够使六个偶极子天线组成一个特高频传感器立体面阵。
[0066]
需要说明的是,由这六个偶极子天线所组成的特高频传感器立体面阵并不是平面的,而是立体的,对于单一局部放电源而言,其可以确保特高频传感器立体面阵中的六个偶极子天线具有不同的朝向,即每个偶极子天线接收到的同一局部放电源的特高频局部放电信号均具有一定差异性。
[0067]
其中,正对着局部放电源的偶极子天线所接收到的局部放电信号幅值最大,其他朝向的偶极子天线所接收到的特高频局部放电信号幅值相对较小,且随着朝向的不同,具有不同的幅值。由此,基于这一原理,根据特高频局部放电信号幅值的大小,即可对局部放电进行定向。
[0068]
通过这种技术手段,基于接收到的6个偶极子天线检测的特高频局部放电信号,可以获得各个偶极子天线检测的特高频局部放电数据。在本发明中,与各偶极子天线的数据
输出端连接的处理模块基于上述获得的原始特高频局部放电数据进一步生成样本数据,然后通过对样本数据进行聚类,以减小定向误差,并进一步地将聚类结果中的最大类的中心值作为局部放电的最终定向结果。
[0069]
综上,基于本发明上述的局部放电定向系统,可以实施本发明所述的局部放电定向方法,以对局部放电进行精确定向,该局部放电定向方法的步骤流程如下述图5所示。
[0070]
图5为本发明所述的局部放电定向方法在一种实施方式下对局部放电源进行定向的步骤流程图。
[0071]
参阅图5可以看出,在本实施方式中,采用图1-图4设计的局部放电定向系统对局部放电进行精确定向,具体可以包括以下步骤:
[0072]
(1)采用由正十二面体框架和6个偶极子天线(11、12、13、14、15、16)组成的特高频传感器立体面阵采集1分钟内的局部放电源的特高频局部放电数据。其中当产生局部放电时,6个偶极子天线能够同时分别检测到特高频局部放电数据。
[0073]
在此情况下,由于采集时间持续一段时间,例如1分钟,该特高频传感器立体面阵就能够接收到许多组作为原始数据的特高频局部放电数据,且每组原始数据中都包括有这次局部放电过程中所有偶极子天线接收到的特高频局部放电信号幅值数据及其对应的位置坐标。
[0074]
需要说明的是,本发明对于采集时间并不做特殊限定,在实际操作时,操作人员可以根据需求,控制特高频传感器立体面阵的具体采集时间。
[0075]
(2)处理模块对接收自各偶极子天线的特高频局部放电数据进行归一化处理,然后对归一化处理后的数据进行多项式插值拟合以扩展数据,从而得到样本数据。
[0076]
这是因为,考虑到在本实施例中特高频传感器立体面阵中只有6个偶极子天线,为了确保局部放电的精确定向,本发明对数据进行扩展,从而获得数量更多的样本数据。
[0077]
在本发明中,在处理模块中对这些接收自各偶极子天线的特高频局部放电信号的幅值数据进行简单归一化后,再进一步采用多项式插值拟合,即可获得样本数据。其中,多项式插值拟合的过程,即对横坐标x和纵坐标y建立如下所示的一元n次方程:
[0078]
y(x)=anxn a
n-1
x
n-1
l a2x2 a1x a0[0079]
其中,a0,a1,
……
,an为待求系数,联立建立方程组并利用最小二乘法求解未知数。
[0080]
(3)处理模块采用k-means聚类方法对样本数据进行聚类,并将聚类结果中的最大类的中心值作为局部放电的最终定向结果。
[0081]
在本发明上述步骤(3)中,考虑到局部放电的定向结果往往由于噪声及电磁波传输路径影响呈现一定的波动性。因此,在本发明中,先对样本数据采用聚类的方法以减小定向误差,在本实施方式中,处理模块采用k-means聚类方法对样本数据进行聚类,k-means聚类方法是目标划分中较为经典的聚类算法,其具体过程是优化使得所有类中的点距离中心值的欧式距离之和最小:
[0082][0083]
其中,e是所有点的平方和误差,xj为第j次局部放电的定向结果,并且是第i个聚类mi中的点,μi是聚类mi的中心值。
[0084]
由此,通过聚类方法可以将初步定向结果进行聚类,以最大类中的中心值作为局部放电的最终定向结果。在本实施方式中,处理模块根据所得到的拟合后的样本数据可以绘制出如下述图6所示的二维定向结果图。
[0085]
图6为本发明所述的局部放电定向方法在一种实施方式下对局部放电进行定向的二维定向结果图。
[0086]
在本发明中,在构建二维定向结果图时,每一个样本数据均包括它们自身的x坐标、y坐标以及幅值。其中,幅值大小可以用不同深浅的颜色表示,幅值越大则颜色越深,幅值越小则颜色越浅。基于这种设计,可以将样本数据以不同深浅颜色的图像来表征,图像中颜色最深处(幅值最大处)即可对应表示最终定向结果。
[0087]
如图6所示,在本实施方式中,ant01、ant02、ant03、ant04、ant05、ant06分别对应于六个偶极子天线,基于生成的二维定向结果图,可以对局部放电进行定向,将聚类结果中的最大类的中心值(即图6中偶极子天线16(ant06)区域的颜色最深处p处)作为最终定向结果。
[0088]
综上所述可以看出,本发明所述的基于特高频传感器立体面阵和聚类的局部放电定向系统和方法,易于实施,并且有着较高的局部放电定向精度,其具有良好的推广前景和应用价值。
[0089]
此外,由于本发明所述的局部放电定向系统的装置轻巧且易于实施,其能够满足常用的无人机负荷要求,正十二面体框架可以挂载于无人机上,以实现对配网线路及设备的飞行巡检。
[0090]
另外,在本发明上述技术方案中,图1-图6所示实施方式均采用的是6个偶极子天线,当然在一些其他的实施方式中,也可以根据具体需求,采用6个以上的偶极子天线。
[0091]
需要说明的是,本发明的保护范围中现有技术部分并不局限于本技术文件所给出的实施例,所有不与本发明的方案相矛盾的现有技术,包括但不局限于在先专利文献、在先公开出版物,在先公开使用等等,都可纳入本发明的保护范围。
[0092]
此外,本案中各技术特征的组合方式并不限本案权利要求中所记载的组合方式或是具体实施例所记载的组合方式,本案记载的所有技术特征可以以任何方式进行自由组合或结合,除非相互之间产生矛盾。
[0093]
还需要注意的是,以上所列举的实施例仅为本发明的具体实施例。显然本发明不局限于以上实施例,随之做出的类似变化或变形是本领域技术人员能从本发明公开的内容直接得出或者很容易便联想到的,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。